常用的图像分割评价指标非常多,论文中常用的指标包括像素准确率,交并比(IOU),Dice系数,豪斯多夫距离,体积相关误差。
下面提到的所有案例都是二分类,标签中只有0和1
目录
一:像素准确率
二:交并比IOU
三: 骰子系数Dice
四:Hausdorff distance豪斯多夫距离
五:CPA-类别像素准确率
六:MPA-类别平均像素准确率
七:MIOU(平均交并比)
一:像素准确率
定义:它是图像中正确分类的像素百分比,即分类正确的像素占总像素的比例,用公式可以表述为
其中:
n代表类别总数,包括背景的话就是n+1。
为真实像素类别为i的像素被预测为类别i的总数量,也就是对于真实类别i的像素来说,分对的像素总数有多少。
真实像素类别为 i 的像素被预测为类别 j 的总数量, 换句话说,就是对于类别为 i 的像素来说,被错分成类别 j 的数量有多少.
TP为真阳性数,在标签中为阳性,在预测值中也为阳性的个数。
TN为真阴性数,在标签中为阴性,在预测值中也为阴性的个数。
FP为假阳性数,在标签中为阴性,在预测值中为阳性的个数。
FN为假阴性数,在标签中为阳性,在预测值中为阴性个数。
四者相加等于总像素数 TP+TN=正确分类的个数。
PA像素准确率有可以用两种方式来进行计算,如下图中的例子
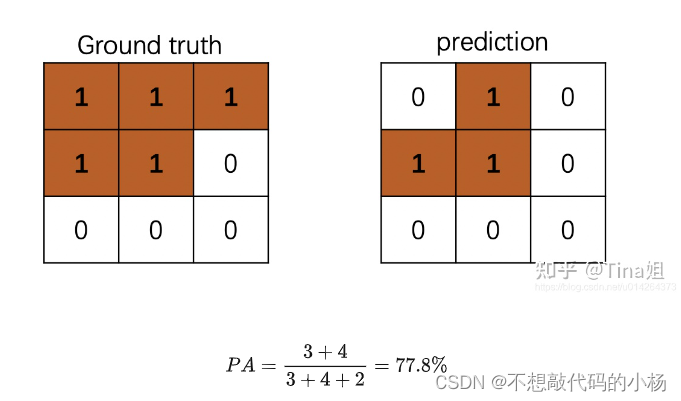
在图中TP=3,TN=4,FN=2,FP=0,正确分类的像素数为7,总像素数为9。
但是这个指标不适用于类别不平衡的问题中,但是大多数医学图像分割都存在着类别不平衡的瓶颈问题!
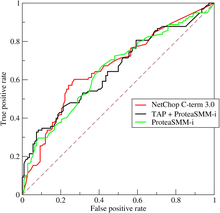
二:交并比IOU
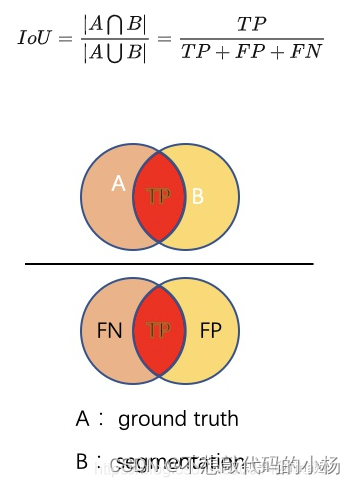
Intersection-Over-Union(IOU),也被称为Jaccard指数,是语义分割中最常用的指标之一。
简单的说,IOU是预测分割和标签之间的重叠区域除以预测分割和标签之间的联合区域(两者的交集/两者的并集),如图所示,这个指标的范围是0-1(0-100%),其中0代表没有重叠区域(也就是说分割的效果特别差),1表示完全重叠的分割。其计算公式和示意图如下:
在上面的像素准确率的例子中,它的IOU计算公式如下:

三: 骰子系数Dice
Dice系数定义为2倍的交集除以像素和,也叫F1 Score。Dice系数与IOU非常相似,它们是正相关的,其公式表示为:

可以看到Dice系数对应于IOU,分子和分母中的TP都取了2倍 。仍然使用上面那个例子,在这个例子中它的Dice为

四:Hausdorff distance豪斯多夫距离
HD用于分割指标,主要是用来度量边界的分割准确度。
HD是描述两组点集之间相似程度的一种度量,它是两个点集之间距离的一种定义形式:假设有两组集合A={a1,....,ap},B={b1,....bq},则这两个点集之间的HD定义为:
H(A,B)=max(h(A,B),h(B,A))
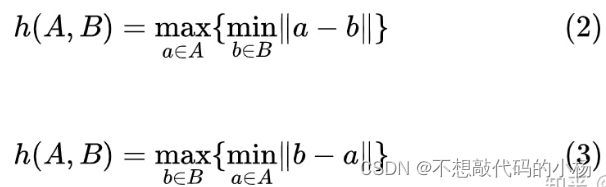
其具体过程如下图所示:
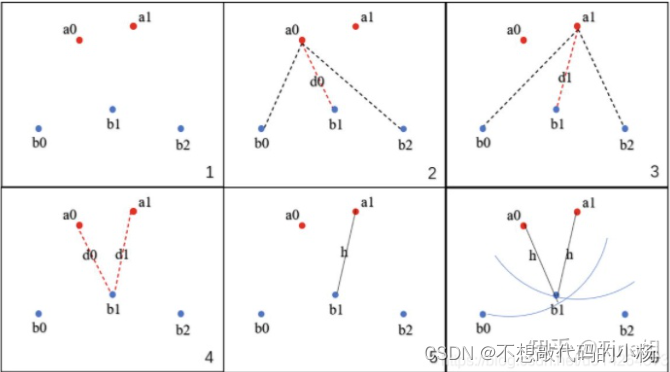
1):取集合A中的一点a0,计算a0到集合B中所有点的距离,保留最短的距离d0
2)计算集合A中的另一点a1到集合B中所有点的距离,保留最短的距离为d1
3)比较所有的的距离{d0,d1....}选出最长的距离d1
这个最长的距离就是h,它是由A->B的单向豪斯多夫距离,记为h(A,B)。
同理也可以计算出B->A的单向豪斯多夫距离h(B,A).选出h(A,B)和h(B,A)中的最长距离。这个最长
距离就是A,B两个集合的双向豪斯多夫距离
在一般的医学图像分割任务当中,往往是HD越小代表模型的性能越好!
五:CPA-类别像素准确率
对应的是精准率,其主要含义在类别i的预测值中,真实属于i类的像素准确率。换句话说,模型对类别i的预测值有很多,其中有对有错,预测对的值占预测总的值的比例。
比如类1:P1=TP/(TP+FP)
六:MPA-类别平均像素准确率
即分别计算每个类被正确分类像素数的比例,也就是CPA然后再累加求平均。
七:MIOU(平均交并比)
模型对于每一类预测的结果和真实值的交集与并集的比值,求和再平均的结果
公式为(IOU正例+IOU反例)/2