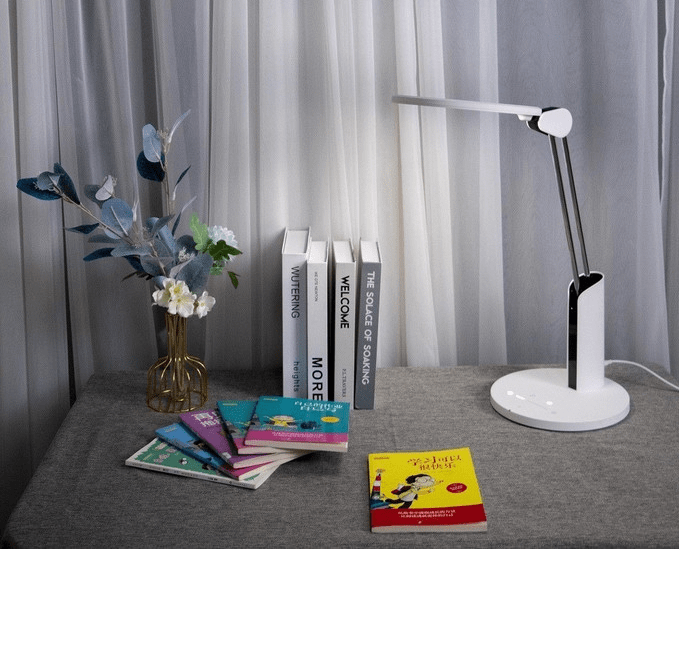
相机固定,机器人吸住一个物料,拍照,然后将电池放到其他位置,这也是一个经典的应用场景。

相机在上和在下都是一样的标定方法,只是需要注意下角度取反而已,大家在实际使用的时候自己测试一下就知道角度取反问题.
其标定方法和之前的固定相机-先拍再抓一样,都是先9点标定,再5点标定
我们的目的是把这个物料,放到一个标准的位置,这个位置可能是在视野内,也可能是在视野外.
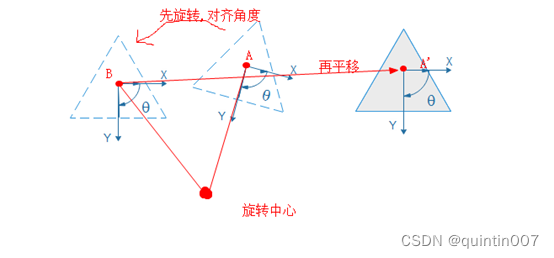
放到视野内,就很简单的了,结合我们之前将的旋转中心标定讲解的知识,A点移动到B点,根据旋转中心计算即可
但
很多场景下,物料要放置的位置不在视野范围内,这时候又有多种解法了,一般的做法是,把物料放到需要放的位置,然后机器人将这个物料吸取到视野范围内,记录从吸料位置到此处拍照的位置,得到一个偏移值,将当前拍照得到的row,col设置为参考点,这样后面定位的时候,将mark点移动到参考点,然后再加上之前记录的偏移值即可!
这种方法,很常规,但是实际使用中并不好用,而且对于写程序的人而言不好进行验证!!!
写到这里,我想说下自己的一些感触,定位项目实际是就是一个仿射变换计算,但是定位项目最难的地方,也是最让人操心的地方,就是当别人怀疑精度不够的时候如何去验证???
以及你自己在写定位程序的时候要一步一步的去验证自己的计算过程,步步为营
所以针对这种放置位置不在视野范围内的,我一般的做法都是默认图像中心为参考点,将物料纠偏到图像中心去!!!
因为我们自己做的图像控件,一般都会有显示十字中心的功能,我们在验证的时候可以先测试移动图像中心,这一步做到了,剩下的就是一个简单的xy偏移了.
注意