变换
为什么要变换?
变换有两种,一种 model 和 view 变换,其中model变换中包括缩放, 而view则主要是讲3D投影到2D的画面上
二维变换
要找到一个变换,实际上就是寻找变换后得坐标(x‘,y’)和变换之前的坐标(x,y)之间的关系,即 x’ = Mx
其中M就是变换矩阵,根据M*x就可以得到变换之后的坐标。
缩放(Scale)

(x’,y’)和(x,y)的关系写成矩阵的形式就是

缩放又可以分为均匀缩放和非均匀缩放:

若Sx和Sy不相等,则x轴和y轴的拉伸程度不通,最终得到的结果就是非均匀缩放。

反射矩阵(Shear Matrix)

y轴不变,将物体对y轴进行对称,则 x’ = -x , y’ = -y,矩阵表示如下

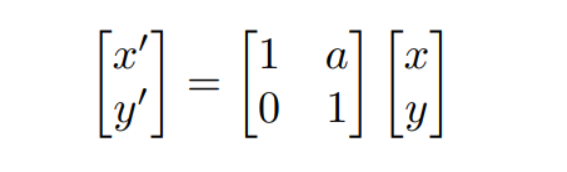
切变换(Shear Matrix)

改变换如图所示,物体在y轴方向上没有变化,而在x轴方向上进行了拉伸
1.在y轴上没有变化,则 y’ = y
2.y = 0 时,水平位移为0,而y = 1时,水平位移为 a,根据图可得,若y = 1/2时,则x的水平位移为 a/2
以上就可以得到(x’,y’)的关系,然后根据关系写出变换:y = y, x = x + ay
旋转(Rotate)
默认情况下,旋转是指绕着原点,逆时针旋转
如果要实现这样一个旋转效果,应该如何做?

直接给出一个旋转矩阵公式如下:

即用(x’,y’) = Rθ * (x,y) 就可以得到这个变换,推到如下:
用两个特殊点A,B来推导这个旋转矩阵,因为这个矩阵是通用的,所以A,B两点的变换也就应该满足这个矩阵,所以直接通过A,B推到出R


推到过程如上图所示,b,d的过程类似,就不再具体的展开

旋转-θ角就是R的逆矩阵,R的逆矩阵 = R的转置 ,所旋转矩阵R是一个正交矩阵
线性变换(Linear Transforms = Matrices (of the same dimension))

线性变换就是:用相同维度的矩阵×变换的点 (前面两行可以看出(x,y)和(x’,y’)是一种线性的关系,所以是线性变换)
符合如下形式的变换,就是线性变换

齐次坐标(Homogeneous coordinates)
为什么要引入齐次坐标?
先看下面一个变换

这是一个位移的变换,其(x’,y’)和(x,y)的关系如上式所示,只是通过简单的相加就能得到其变换,那么写成矩阵的形式呢?如下所示

可以看到,以上的变换并不是一种线性变换,这种变换不能使用之前那种矩阵的形式来得到(x’ = Mx这种形式),缩放以及旋转都可以都是一种线性变换,但是如果将位移这种变换作为一种特殊的情况,那么在应用中会带来很多麻烦。所以这里就要引入齐次坐标,用来解决位移变换的这种特殊的情况,将位移变换也能够统一为
x’ = Mx的这种形式
用齐次坐标解决上面的问题(Solution: Homogenous Coordinates)
如何用齐次坐标?给点(point)或者向量(vector)添加一个维度,即w坐标,
2D point = (x,y,1)
2D vector = (x,y,0)
点和向量添加的w坐标不同,原因后面解释,先看怎么用w维度来对图形进行位移变换:

先看两个等式中间的一个三维矩阵,该矩阵实现了图形的位移的变换,最终(x,y)都加上了位移量t,
接着看三维矩阵,可以对该三维矩阵进行一个划分,其不同部分实现不同的变换效果
1.左上角的二维矩阵

改变该处的值,能够实现图形的缩放和旋转,该部分就相当于之前旋转和缩放时所使用的二维矩阵
2.右上角的2*1的矩阵

此处为的值为图形的变换量,因为tx , ty 最终乘点的w分量1,最后就会讲相应的位移量添加到相应的坐标上,此处就是通过齐次坐标来实现位移的线性变换
3.最下面一列

基本无用,保持001即可
以上就是通过齐次坐标来实现点的线性位移变换,接下来讨论,为什么点和向量的w分量的值不同?
向量代表一个方向,向量即使发生了位移的变换,但是向量的方向仍然不变,并且向量也不会改变,即向量具有位移不变性。所以向量不论进行怎样的位移变换都不应该发生变化,所以向量的w分量为0,则位移矩阵中的位移量就不会添加到向量的x,y坐标上,也就实现了向量的位移不变性

2D 变换汇总

逆变换(Inverse Transform)
逆变换如图所示

先实现了变换M,顺时针旋转并平移,如果要再将图形变回到原来的位置,则就需要使用逆变换

其中M和M的逆为互逆矩阵
组合变换(Composing Transform)
变换的次序应该遵守 先应用线性变换(缩放,旋转),再应用平移变换,(矩阵从右往左为变换先后顺序), 不同的变换顺序会带来不同的效果,为什么?
因为矩阵的运算并不遵守交换律,即两个矩阵A,B相乘 , AB != BA,所以变换矩阵相乘的次序不同,最后得到的变换效果也就不同


根据最终的结果判断是point还是vector,若最终结果w分量为0,则为vector,若w分量不为0,则是point,
point+point得到的结果是两个点的中点,如下:

齐次坐标中点的x,y坐标为x/w,y/2,根据这个计算point + point 最终的结果就是两点的中点
组合变换
如果有一系列的变换,A1,A2,…An 则可以对这些变换进行组合 得到一个最终的变换矩阵,然后用该矩阵×点即可得到一个最终的变换效果。

矩阵乘法虽然不具有交换律,但是具有结合律,可以先将前面n个变换矩阵A1,A2,…An进行结合得到一个最终变换矩阵,再乘点(x,y)即可
分解复杂变换(Decomposing Complex Transform)
比如要实现一个变换:绕C点进行宣传
1.先将原点位移到C点
2.进行宣传
3.将原点移动到原来的位置