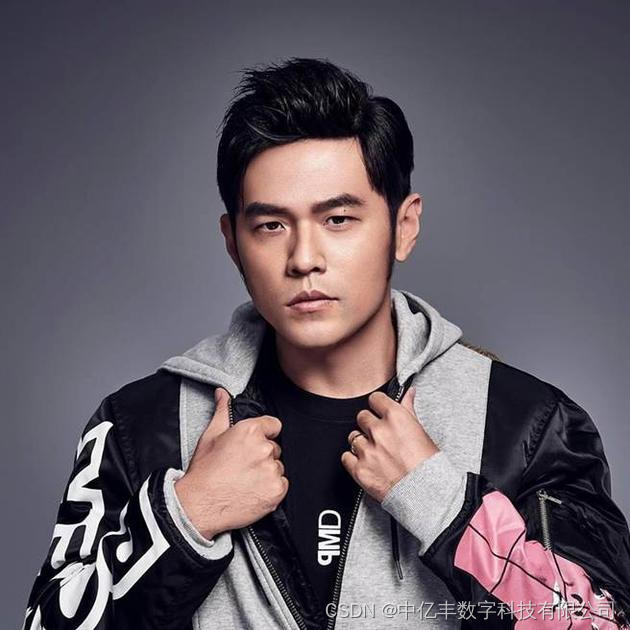
这里是运行效果

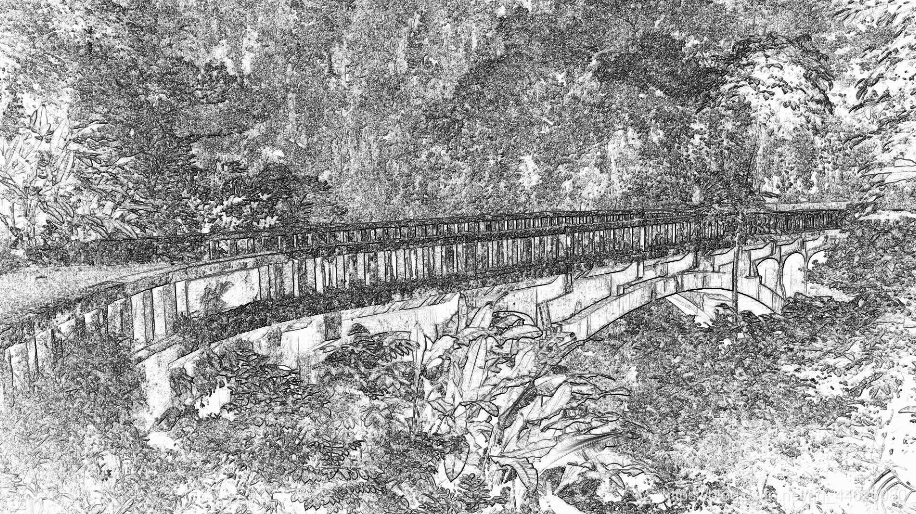
先展示一下完整代码,后面在进行分析
# -*- coding: utf-8 -*-
from PIL import Image
import numpy as npim = Image.open('really.jpg').convert('L')#really.jpg是这里将用于转换的原图
a = np.asarray(im).astype('float') # 将图像以灰度图的方式打开并将数据转为float存入np中.depth = 10. # (0-100)
grad = np.gradient(a) # 取图像灰度的梯度值
grad_x, grad_y = grad # 分别取横纵图像梯度值
grad_x = grad_x * depth / 100.
grad_y = grad_y * depth / 100.
A = np.sqrt(grad_x ** 2 + grad_y ** 2 + 1.) # 构造x和y轴梯度的三维归一化单位坐标系
uni_x = grad_x / A
uni_y = grad_y / A
uni_z = 1. / Avec_el = np.pi / 2.2 # 光源的俯视角度,弧度值
vec_az = np.pi / 4. # 光源的方位角度,弧度值
dx = np.cos(vec_el) * np.cos(vec_az) # 光源对x 轴的影响
dy = np.cos(vec_el) * np.sin(vec_az) # 光源对y 轴的影响
dz = np.sin(vec_el) # 光源对z 轴的影响b = 255 * (dx * uni_x + dy * uni_y + dz * uni_z) # 光源归一化,(梯度和光源相互作用,将梯度转化为灰度)
b = b.clip(0, 255)im2 = Image.fromarray(b.astype('uint8')) # 重构图像im2.save('lk.jpg')#保存得到的手绘图片
im2.show()#展示1.上面的代码要想运行,首先你得安装两个库numpy(一个科学计算库),还有一个PIL(python的图像处理库)
直接终端输入:
pip install numpy
pip install Pillow
2.使用Image.open()方法将图片读入,随后使用numpy将其存在一个二维数组中(二维数组存储的是灰度图)
im = Image.open('really.jpg').convert('L')
a = np.asarray(im).astype('float')
3.取梯度值,建立坐标系
depth = 10.
grad = np.gradient(a)
grad_x, grad_y = grad
grad_x = grad_x * depth / 100.
grad_y = grad_y * depth / 100.
A = np.sqrt(grad_x ** 2 + grad_y ** 2 + 1.)
uni_x = grad_x / A
uni_y = grad_y / A
uni_z = 1. / A
vec_el = np.pi / 2.2
vec_az = np.pi / 4.
dx = np.cos(vec_el) * np.cos(vec_az)
dy = np.cos(vec_el) * np.sin(vec_az)
dz = np.sin(vec_el)
4.通过建好的坐标系,光源归一化
b = 255 * (dx * uni_x + dy * uni_y + dz * uni_z) # 光源归一化,(梯度和光源相互作用,将梯度转化为灰度)
b = b.clip(0, 255)
5图像重构
im2 = Image.fromarray(b.astype('uint8'))
6.得到的手绘图像的展示与存储
im2.save('lk.jpg')#保存得到的手绘图片
im2.show()#展示