1.初步认识ros
1.1ros是什么?
(借用chatgpt的回答)
1.2ros的发展历程
(借用chatgpt的回答)
2.在ubuntu20.04上安装ROS系统
2.1添加ROS软件源
在终端执行如下代码
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.2添加密钥
在终端执行如下代码
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
2.3更新软件源
在终端执行如下代码
sudo apt update
2.4正式安装ROS
在终端执行如下代码
sudo apt install ros-noetic-desktop-full
2.5初始化rosdep
在终端执行如下代码
sudo rosdep init
但是执行后报错
继续执行如下代码解决问题
sudo apt install python3-rosdep2 -y
问题解决

2.6更新rosdep
在终端执行如下代码
rosdep update
但是执行后报错
继续执行如下代码解决问题
sudo apt-get install python3-pip
sudo pip install rosdepc
问题解决
最后继续分步执行如下代码进行再次初始化和更新
sudo rosdepc init
rosdepc update
2.7设置环境变量
在终端执行如下代码
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
2.8安装rosinstall
在终端执行如下代码
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
但是执行后报错
继续执行如下代码解决问题
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool
问题解决
2.9验证ros是否安装成功
在终端执行如下代码
roscore
但是执行后报错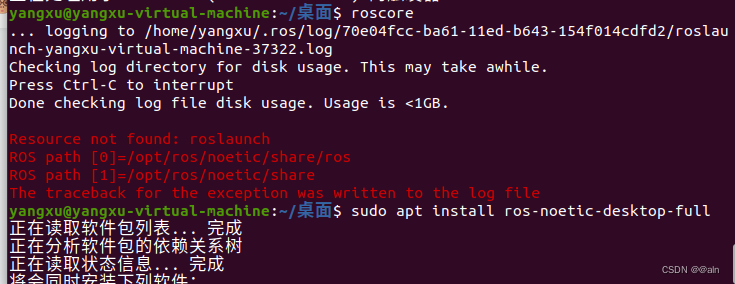
继续执行如下代码解决问题
sudo apt install ros-noetic-desktop-full
问题解决
至此安装过程完美结束
3.简单运行案例
3.1用方向键控制小海龟移动
分别在三个不同的终端上执行如下三条指令
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
成功实现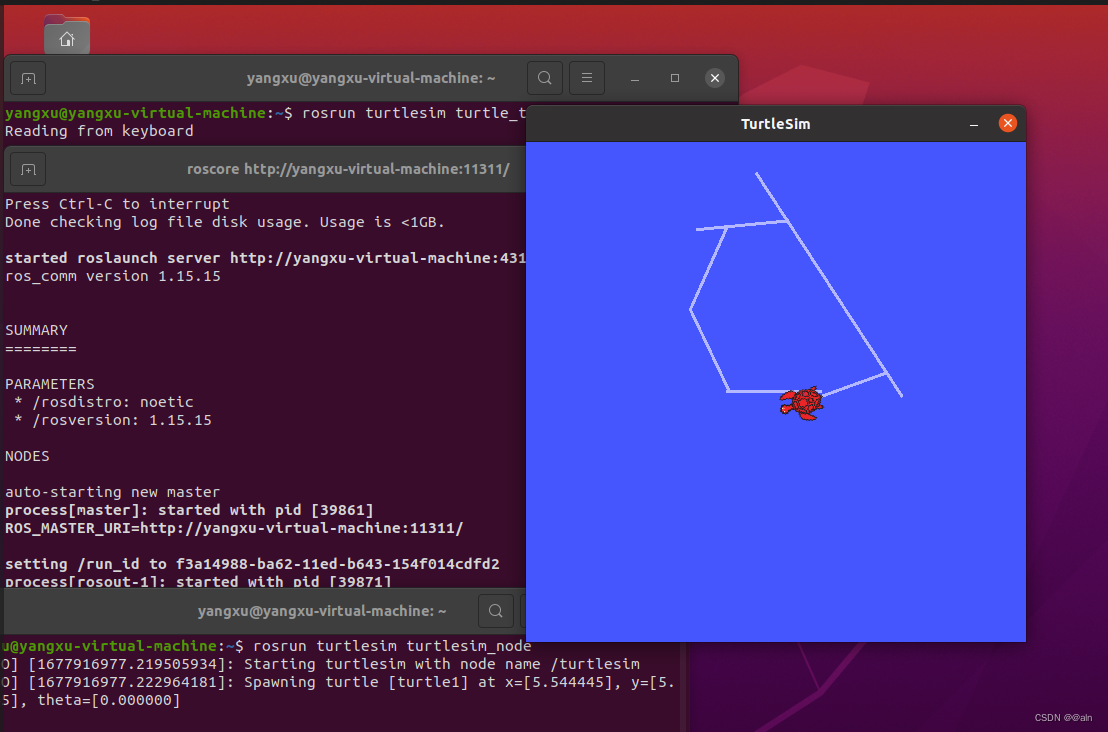
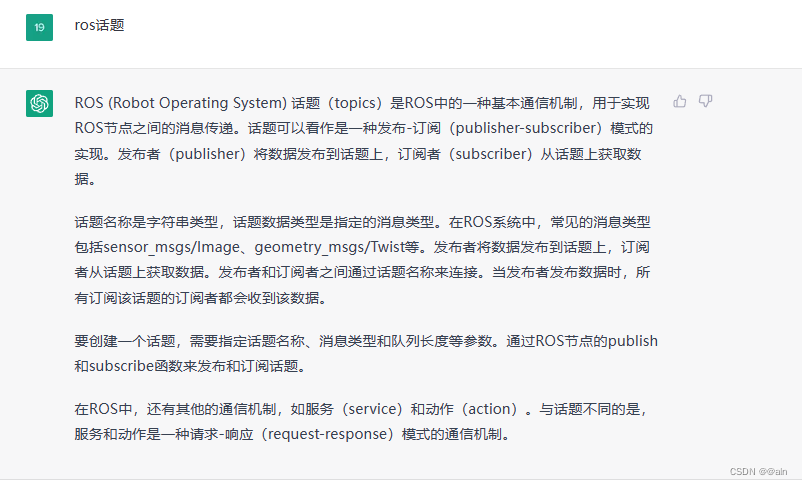
3.2写一个程序,控制小海龟走一个圆形
首先了解什么是ros话题和ros消息(借用chatgpt的回答)
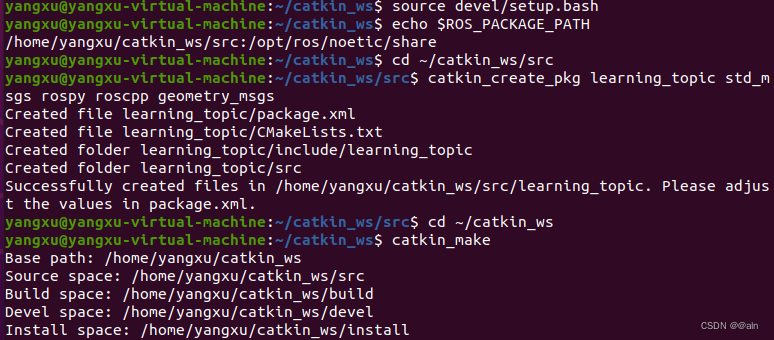
 设置ROS工作空间
设置ROS工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws
catkin_make
source devel/setup.bash
echo $ROS_PACKAGE_PATH
设置ROS功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_topic std_msgs rospy roscpp geometry_msgs
cd ~/catkin_ws
catkin_make
source devel/setup.bash
在位置~/catkin_ws/src/learning_topic/src/下创建publisher.cpp文件,代码如下
#include <sstream>
#include "ros/ros.h"
#include "std_msgs/String.h"
#include "geometry_msgs/Twist.h"
int main(int argc, char **argv)
{
//初始化节点
ros::init(argc, argv, "publisher");
//创建节点句柄
ros::NodeHandle n;
//创建publisher,发布话题[/turtle1/cmd_vel],消息类型[geometry_msgs::Twist]
ros::Publisher chatter_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 1000);
//设置循环频率
ros::Rate loop_rate(100);
while (ros::ok())
{
//定义发布的数据
geometry_msgs::Twist msg;
//定义linear数据
geometry_msgs::Vector3 linear;
linear.x=1;
linear.y=0;
linear.z=0;
//定义angular数据
geometry_msgs::Vector3 angular;
angular.x=0;
angular.y=0;
angular.z=1;
msg.linear=linear;
msg.angular=angular;
//发布msg数据
chatter_pub.publish(msg);
//循环等待回调函数
ros::spinOnce();
//按照循环频率延时
loop_rate.sleep();
}
return 0;
}
进行编译设置
cd ~/catkin_ws/src/learning_topic
gedit CMakeLists.txt
#下面两行代码加再文件末尾
add_executable(publisher src/publisher.cpp)
target_link_libraries(publisher ${catkin_LIBRARIES})
#下面两行代码继续在终端执行
cd ~/catkin_ws
catkin_make
部分实现步骤
成功编译

启动小海龟转圈程序
#打开新终端
roscore
#打开新终端
rosrun turtlesim turtlesim_node
#打开新终端
cd ~/catkin_ws
#下面这一步是为了保证rosrun命令能够找到相应的功能包,有可以省去这一步骤的方法,各位可以自行查找
source ~/catkin_ws/devel/setup.bash
rosrun learning_topic publisher
成功实现
4.参考
https://blog.csdn.net/qq_52187415/article/details/129330316?spm=1001.2014.3001.5502
https://blog.csdn.net/weixin_56197703/article/details/122699813?spm=1001.2014.3001.5506