目录
- 1、LCD显示系统介绍
- 1.1 LCD显示基本原理
- 1.1.1 颜色的显示原理:
- 1.1.2 图像的构成
- 1.2 LCD接口介绍
- 1.2.1 驱动接口 - MCU接口
- 1.2.2 驱动接口 - RGB接口
- 1.2.3 驱动接口 - LVDS接口
- 1.2.4 驱动接口 - MIPI接口
- 1.2.5 RGB / MIPI / LVDS三种接口方式的区别:
- 2、RGB控制原理
- 2.1 LCD显示系统结构
- 2.2 基本显示过程
- 2.3 LCD时钟控制
- 2.3.1 像素时钟
- 2.3.2 水平同步时钟 HSYNC
- 2.3.3 显示一帧 - 垂直同步时钟VSYNC
- 2.4 控制时序
- 2.5 LCD时序与显示的映射关系
- 2.6 linux对LCD时序的抽象
- 2.6.1 struct fb_videomode 显示参数结构体
- 2.6.2 判断 HSYNC,VSYNC,VCLK, VDEN信号是否需要反转
- 3、实验环境介绍
- 4、 exynos4412的LCD控制器相关知识点介绍
- 4.1 显示控制器介绍
- 4.2 时钟
- 4.3 RGB接口
- 4.3.1 RGB接口控制器
- 4.3.2 RGB接口规范
- 4.3.3 信号
- 4.3.4 LCD RGB接口时序
- 4.4 寄存器
- 4.4.1 寄存器概况
- 4.4.2 寄存器使用详述
- 4.4.2.2 时钟寄存器
- CLK_SRC_LCD0 (P505)
- CLK_SRC_MASK_LCD
- CLK_DIV_LCD (P530)
- CLK_GATE_IP_LCD (P556)
- 4.4.2.3 系统寄存器
- LCDBLK_CFG (P884)
- LCDBLK_CFG2 (P886)
- 4.4.2.4 LCD控制寄存器
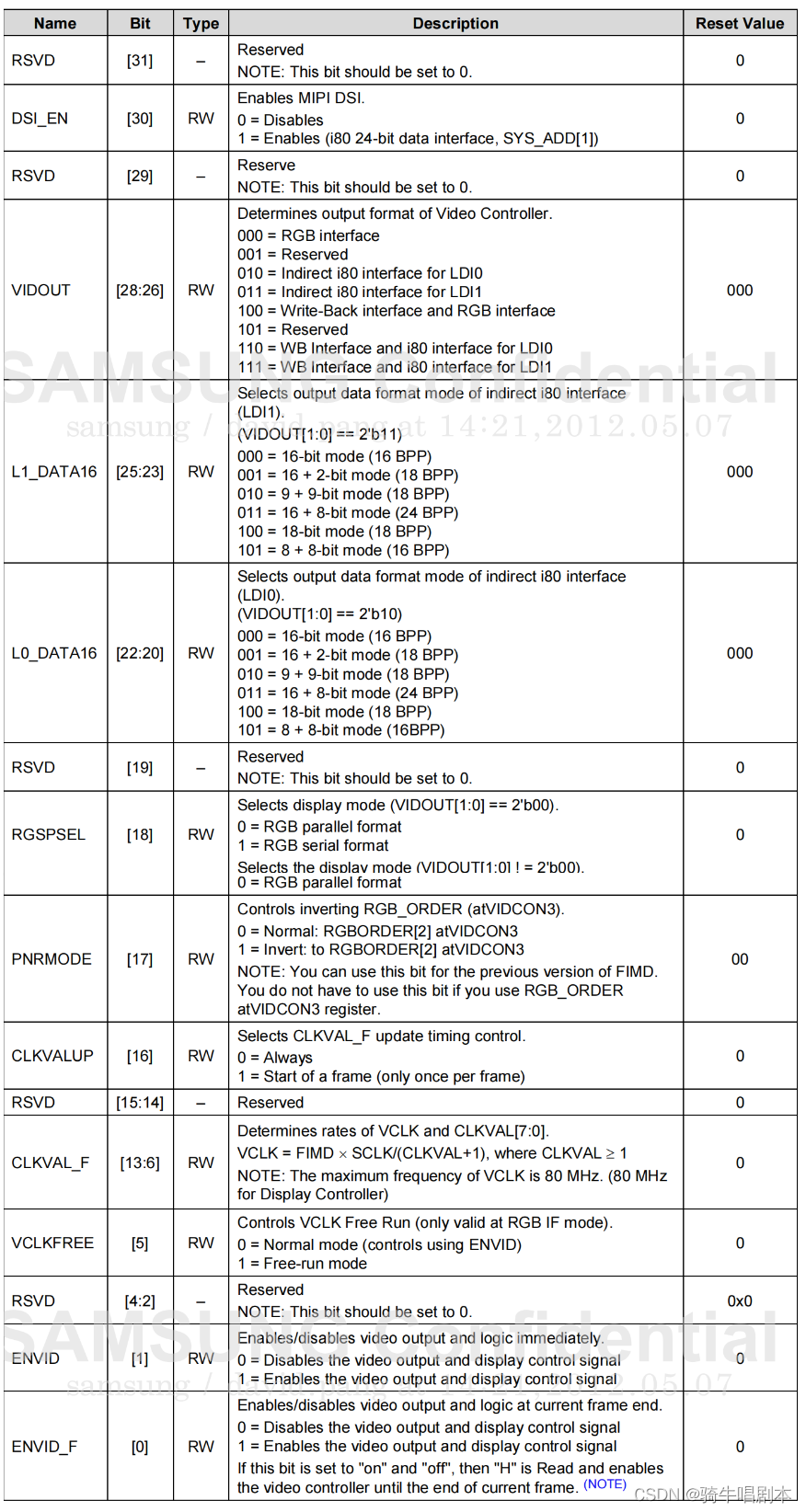
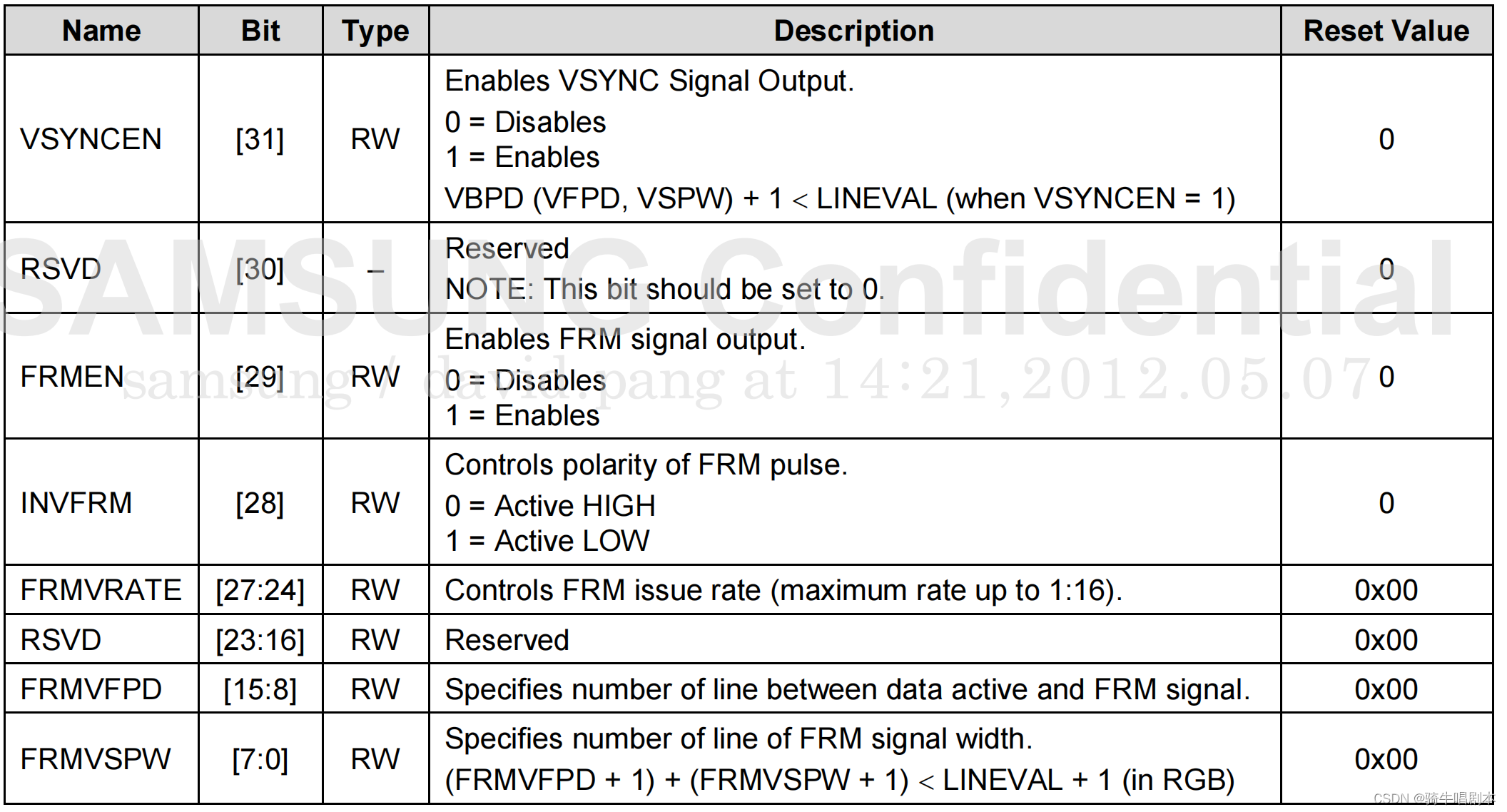
- VIDCON0 (P1838)
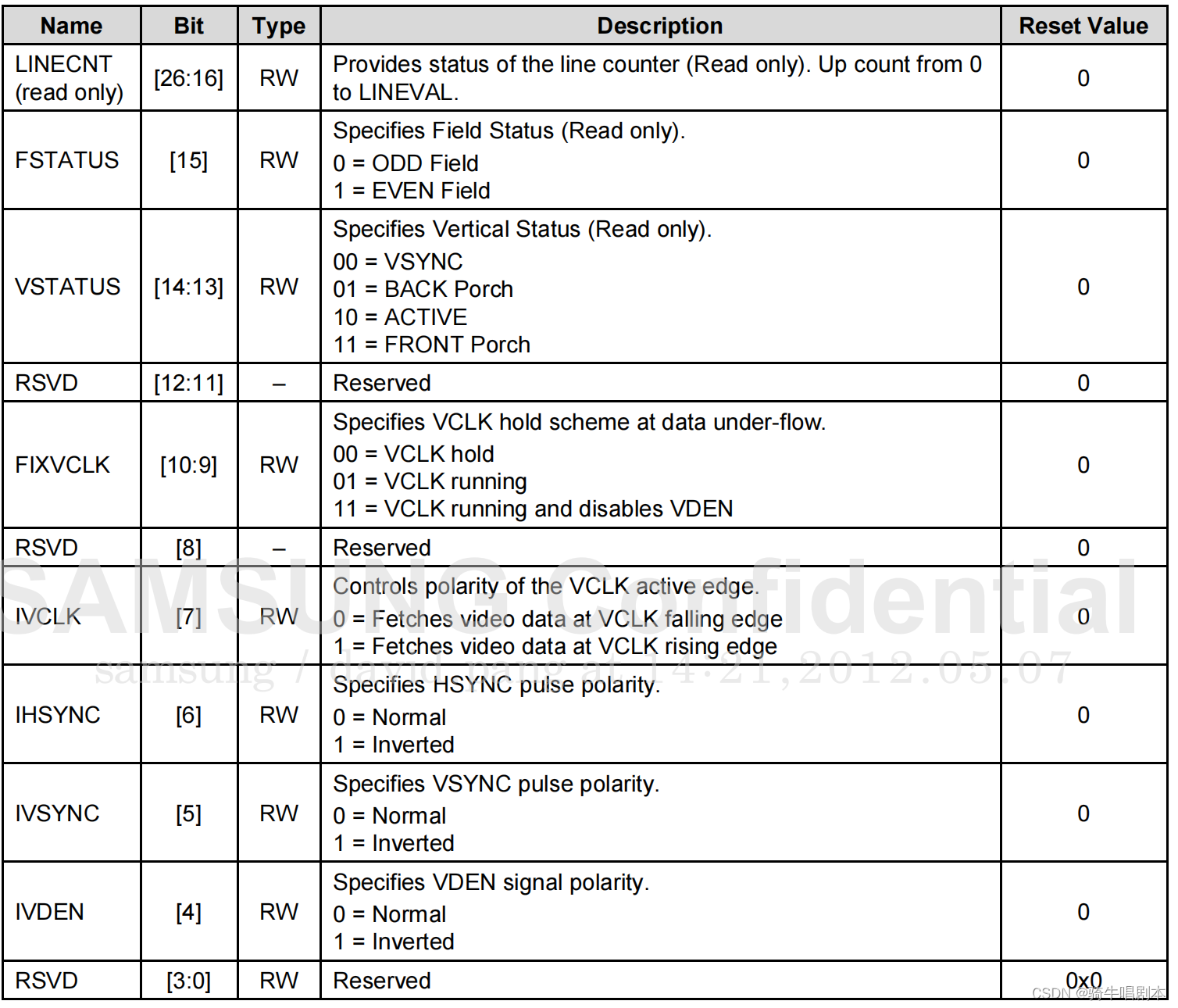
- VIDCON1 (P1839)
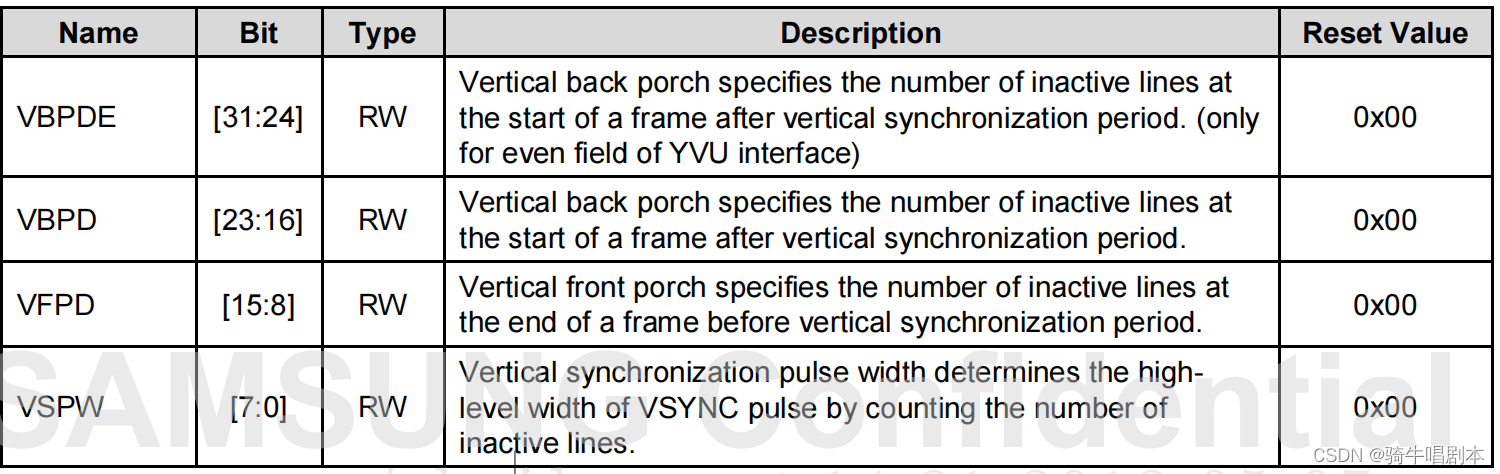
- VIDTCON0 (P1842)
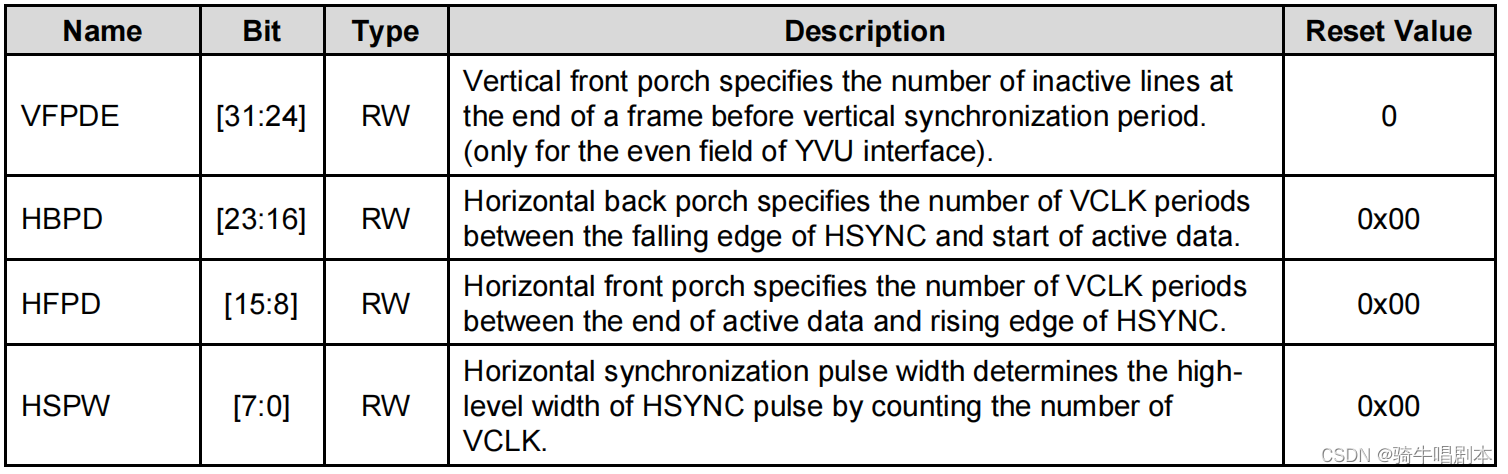
- VIDTCON1
- VIDTCON2 (P1843)
- VIDTCON3 (P1843)
- WINCON0 (P1844)
- SHADOWCON (P1859)
- WINCHMAP2
- VIDOSD0A VIDOSD0B VIDOSD0C(P1863)
- 4.4.2.5 电源管理寄存器
- 9 LCD0_CONFIGURATION
- 5、结语
本篇是LINUX3.14环境中的LCD驱动框架的第一篇,主要讲解LCD显示的基本原理,RGB控制器的运行原理,LCD硬件编程的准备知识,包括大量的需要使用到的寄存器详述。由于涉及到大量的细节,因此写的过程中难免有错误与遗漏,因此,如有发现错漏,请及时留言指出。哪些地方不好理解,或没说明白,也请指出,我们一起讨论完善。
1、LCD显示系统介绍
1.1 LCD显示基本原理
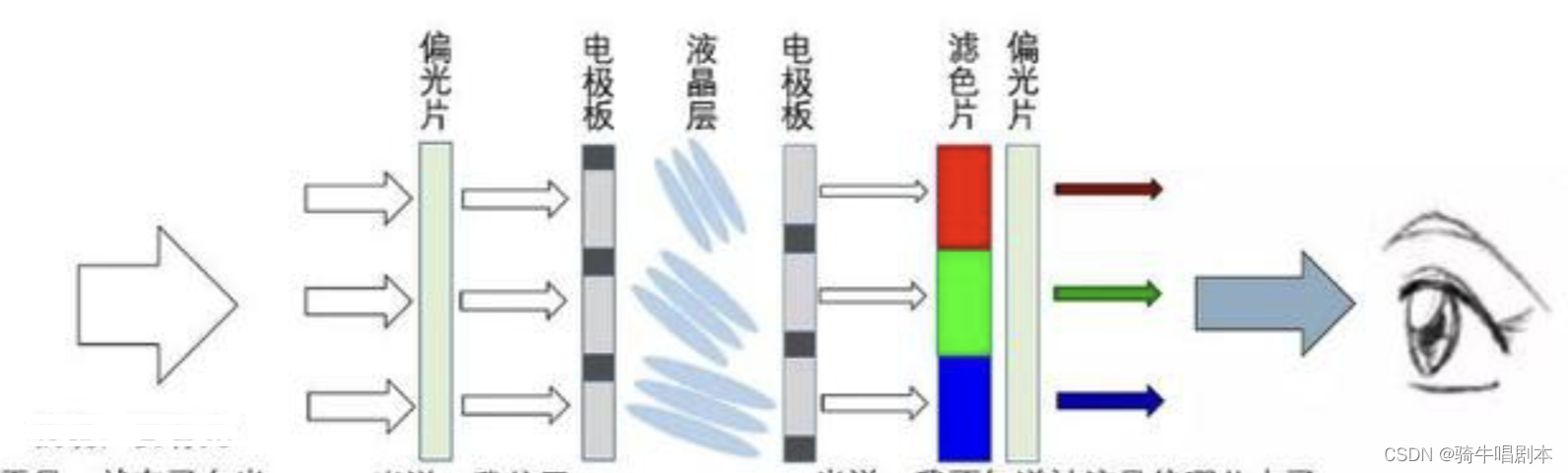
\qquad 从这张图就可以看出。白光经过楄光和液晶层后通过每一个像素的RGB的三个子像素后,就能呈现出彩色图像。
\qquad 因此,LCD的电路主要任务就是控制如图中的电极板,从而控制液晶形态而达到控制每个红兰绿子像素的秀光量。
\qquad 当前主流的LCD是TFT,特点是超薄、清晰。
1.1.1 颜色的显示原理:
\qquad 显示器的颜色一般采用RGB标准,通过对红(RED)、绿(GREEN),蓝(BLUE)三个颜色相互叠加得到各种不同的颜色。
- 通过对颜色的编码来对颜色进行量化(即转换成数字量,RGB是一种编码方式);
- 每种颜色根据RGB格式不同,每种颜色的量化位不相同;
- 常见的RGB格式有RGB565/RGB888,即:
RGB565: red :5 green : 6 blue:5(16BPP)
RGB888: red :8 green : 8 blue:8(24BPP) - 有的还会有个alpha参数,用于实现图形渐变效果,以及半透明效果,0xFFF=全透明,0x0=不透明;
1.1.2 图像的构成
像素:
- 像素pix,显示的最小单位;
- 在计算机只常用若干位数据来表示一个像素,比如使用R8、G8、B8共24位来表示一个像素,这个也称为像素深度,单位为BPP 常见的有16BPP/24BPP;
- 像素深度越大,则一个像素点所显示的颜色就越多,所显示的颜色更广;
帧:
- 一屏图像被称为一帧,每帧里面由行列排列的像素组成;
调色板:
\qquad 画油画的时候,通常先在调色板里配好想要的颜色,再用画笔沾到画布上作画。
\qquad LCD控制器里也借用了这个概念,从FrameBuffer获得数据,这个数据作为索引从调色板获得对应数据,再发给电子枪显示出来。
\qquad 假如是16BPP的数据,LCD控制器从FB取出16bit数据,显示到LCD上。
\qquad 当如果想节约内存,对颜色要求也没那么高,就可以采用调色板的方式,调色板里存放了256个16bit的数据,FB只存放每个像素的索引,根据索引去调色板找到对应的数据传给LCD控制器,再通过电子枪显示出来。
1.2 LCD接口介绍
\qquad 不同的组件之间的连接,需要做好很多约定,这些软硬件的约定构成了接口。在LCD的屏与控制器之间的接口是开发者重点要关注的。接口有不同层次的分别,使用时注意区分:
LCD驱动接口:
用于连接LCD驱动器与LCD控制器这间的软硬件规范。是芯片级的接口。
- 在单片机上:MCU接口
- 在嵌入式中:RGB接口、LVDS接口、MIPI-DSI接口
LCD传输接口:
当LCD与SOC有一定的距离,就需要用到传输技术来为控制器和驱动器传递信号,传输线缆与控制器之前的连接也涉及到相应的软硬件规范。
- HDMI
- DP
- USB
1.2.1 驱动接口 - MCU接口
- 应用领域:小尺寸手机屏,单片机应用,一般4寸以下。
- 优势:价格便宜。
- 劣势:指令逐点写入,速度慢
- 接口执行标准:Intel 8080总线标准(I80标准)
-
- 8080模式 、6800模式
-
- 并行8位、16位、18位、24位传输
-
- 无需时钟和同步信号
- L C D 驱动器要内置 G R A M \color{red}{LCD驱动器要内置GRAM} LCD驱动器要内置GRAM,直接一对一投射每个象素。
- 显示过程 不需要点、行、帧时钟 \color{red}{不需要点、行、帧时钟} 不需要点、行、帧时钟。
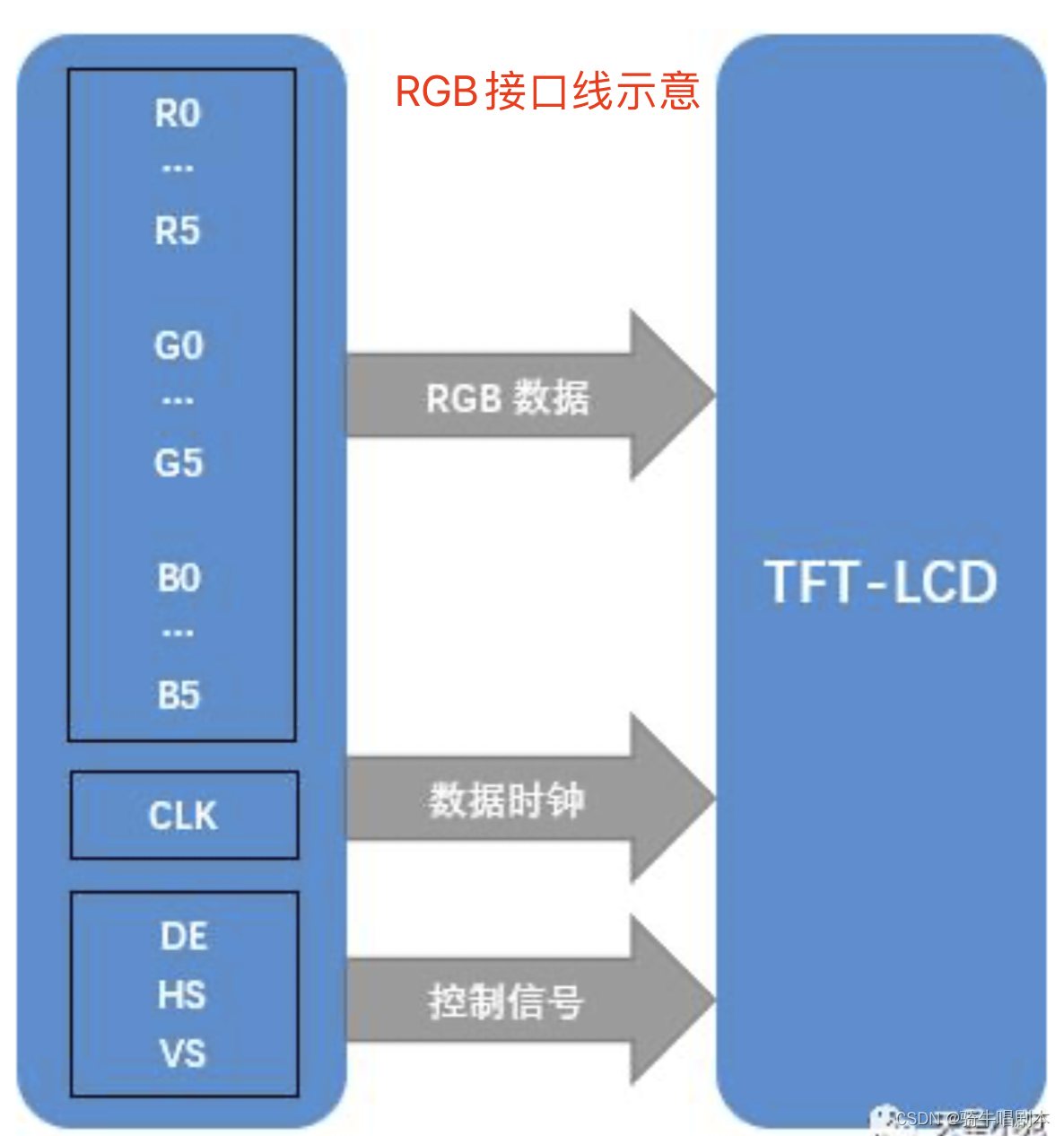
1.2.2 驱动接口 - RGB接口
- 应用领域:嵌入式应用,一般7寸以上。
- 优势:直接写屏,显示速度快
- 劣势:价格高,功耗大,抗EMI电磁干扰弱
- 接口执行标准:TTL
-
- 颜色编码方式RGB24 / RGB888 / RGB555 / RGB565 / RGB666
-
- 并行24位传输
-
- 显示过程要有时钟和行、帧同步信号等(HSYNC, , VSYNC , ENABLE , CS , RESET , RS)
- 显存是 内存映射 \color{red}{内存映射} 内存映射,LCD驱动中没有GRAM。
1.2.3 驱动接口 - LVDS接口
LVDS:Low Voltage Differential Signaling 是一种低压差分信号技术接口。
- 应用领域:嵌入式应用,一般7寸以上。
- 优势:直接写屏,显示速度快,功耗小,EMI电磁干扰小
- 劣势:价格高
- 接口执行标准:LVDS
-
- 信号内容:RGB
-
- 常见的lvds接口分为四通道、五通道、十通道。
- 速度快,常见的有几百Mbit/s
1.2.4 驱动接口 - MIPI接口
MIPI:Mobile Industry Processor Interface 移动行业处理器接口
- 应用领域:移动嵌入式领域
- 应用的接口标准:DSI(Display Serial Interface Specification)和 CSI(摄像头接口)
- 优势:高速,功耗小,干扰小
- 劣势:价格高
- 接口执行标准:
-
- 信号内容:视频流数据和控制指令
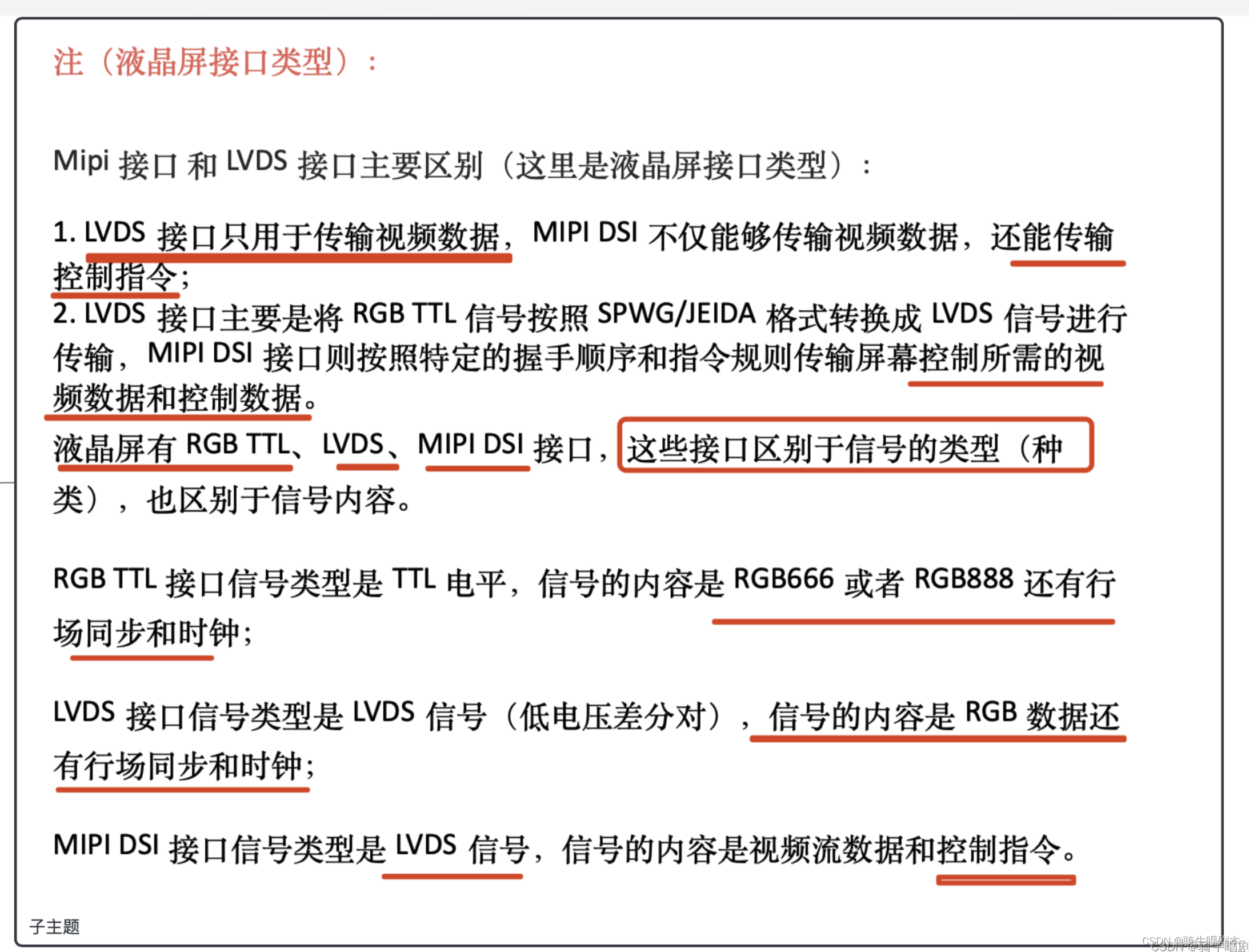
1.2.5 RGB / MIPI / LVDS三种接口方式的区别:
2、RGB控制原理
由于手上是一块RGB的7寸电容屏,因此,本文重点介绍RGB接口的驱动方法。
下面这些内容会涉及到比较多的细节,这是因为在具体编写驱动时,会设置LCD控制器和LCD屏的很多参数,这些个参数的具体与硬件的对应关系就在本章节列述。
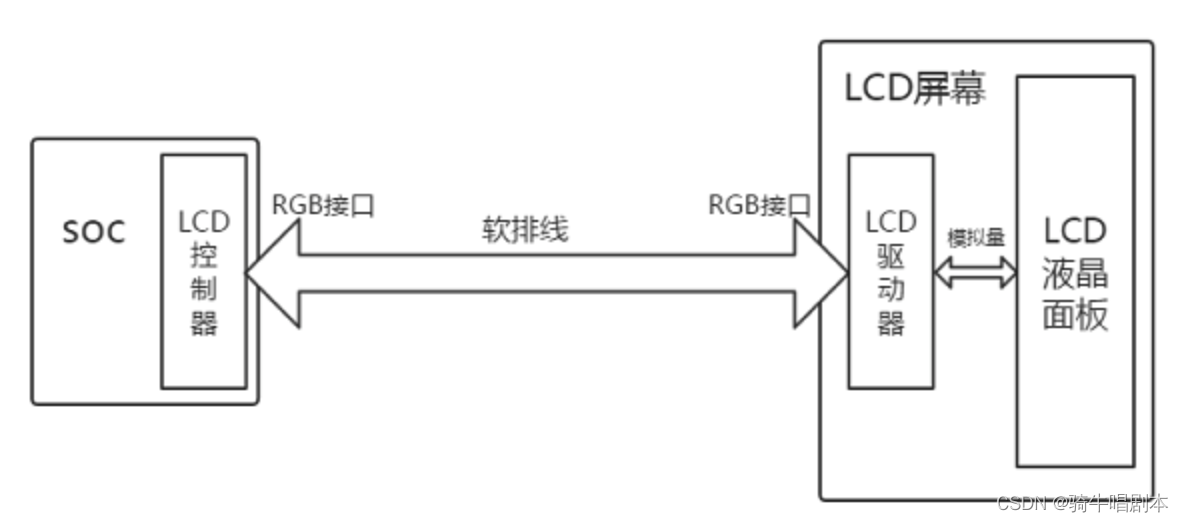
2.1 LCD显示系统结构
在嵌入式领域,RGB接口的LCD驱动结构一般如下图所示:
图2.1
| 组件 | 描述 |
|---|---|
| SoC | 负责发送显示数据及控制指令等给LCD。 |
| 显 存 | SoC在内存中选一段内存,用来存放颜色数据(应用程序通过往显存中写数据),然后通过配置将LCD控制器和这一段内存连接起来,构成一个映射关系,一旦这个关系建立以后,LCD控制器就会自动从显存中读取像素数据传给LCD驱动器,LCD驱动器会自动的控制每个像素点的液晶分子,以形成最终的图像,建立这个映射以后就不需要SoC再来参与任何行为了。 |
| LCD控制器 | 在SoC内部会集成有LCD控制器,它负责通过数字接口向外部的LCD驱动器提供要显示的像素数字信号。它必须按照一定的时序和LCD驱动器通信,LCD控制器受SoC控制,SoC会从内存中拿出像素数据给LCD控制器并最终传给LCD驱动器。 |
| LCD驱动器 | LCD驱动器一般与LCD面板集成在一起,面板需要一定的模拟电信号来控制液晶分子,LCD驱动器芯片负责给面板提供控制液晶分子的模拟电信号,驱动器的控制信号(数字信号)来自于LCD控制器的提供的接口。 |
2.2 基本显示过程
LCD显示一张图片,其实是每一个像素点的填充,只是速度很快我们人眼没有察觉而已。
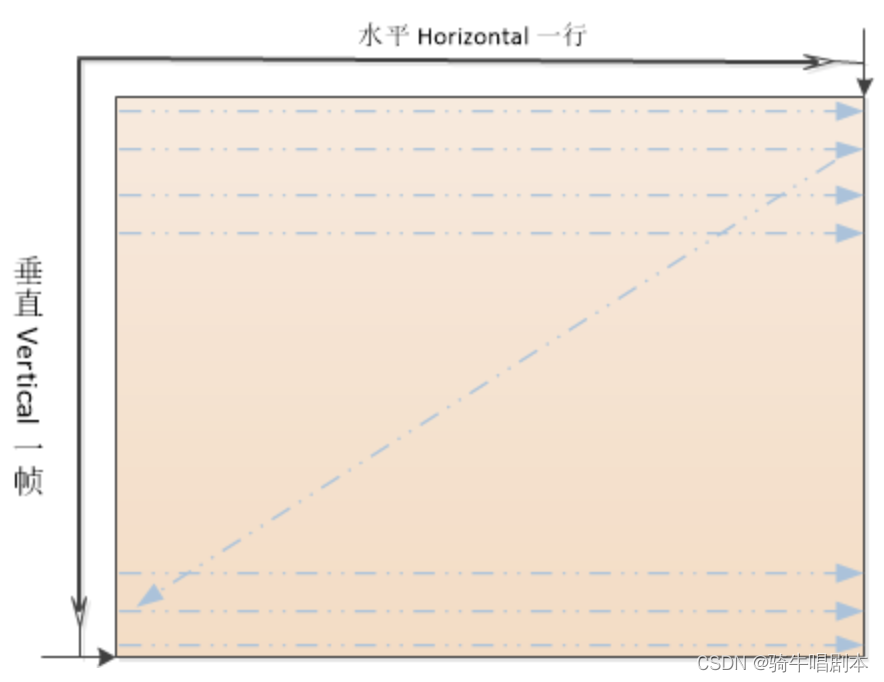
- 我们将LCD屏幕分为水平方向和垂直方向
- LCD每一行的像素点被逐一填充,填充完一行继续填充下一行,填充顺序可以为左->右 或者 右->左
- 每一帧图像,就从第一行的第一个像素点一直填充到最后一行的最后一个像素点。
- 例如上图就现实一帧的图像(从左到右,从上到下)。
2.3 LCD时钟控制
时钟是LCD正确工作的核心因素。上面所描述的每个像素的逐一发送,每一行,每一帧的正确发送,都依靠各个时钟的有序运作。其中最基础的是像素时钟。
2.3.1 像素时钟

\qquad 如上图,展示的是一个800*480的RGB LCD屏幕。 24bpp 显示模式(即红绿蓝三色,每色由8bit数位表示)。 显示一行,LCD需要填充800个像素点。每一个像素由RGB三元素组成,每个元素(R、G、B)由8bit位数组成,也就是说一个像素我们需要通过信号线传输24bit的数据。
\qquad 如图所示,每一个clk的脉冲,发送一个像素数据。一行共发送800个像素数据。
\qquad 像素时钟clk是一个持续的信号,在实际工作中必须还要解决,哪一个CLK代表一行的开始?哪一个CLK代表第一个有效的像素数据?这就需要有水平同步时钟HSYNC。
2.3.2 水平同步时钟 HSYNC
HSYNC水平同步信号,表示一行数据的开始。具体如下图

\qquad 其中CLK没有任何变化,只是多了HSYNC和DEN(上图中的ENB)两个信号。
\qquad 如图中的红色箭头,当HSYNC产生了如图所示的变化表示新的一行数据传送马上开始,当ENB信号线为高电平期间传输的数据视为有效数据。这样一来,一行800个像素的数据才能正确的传送完成。
2.3.3 显示一帧 - 垂直同步时钟VSYNC
\qquad 按照我们之前假设的800*480LCD。从第一行一直到最后一行,整个LCD屏幕所有像素填充完毕,这一过程也就是写了一帧数据,我们如果要LCD能够实时显示画面,很显然一帧数据肯定不够,所以要给LCD不断的提供新的帧数据,这无非也就是重复上述显示一帧的过程。
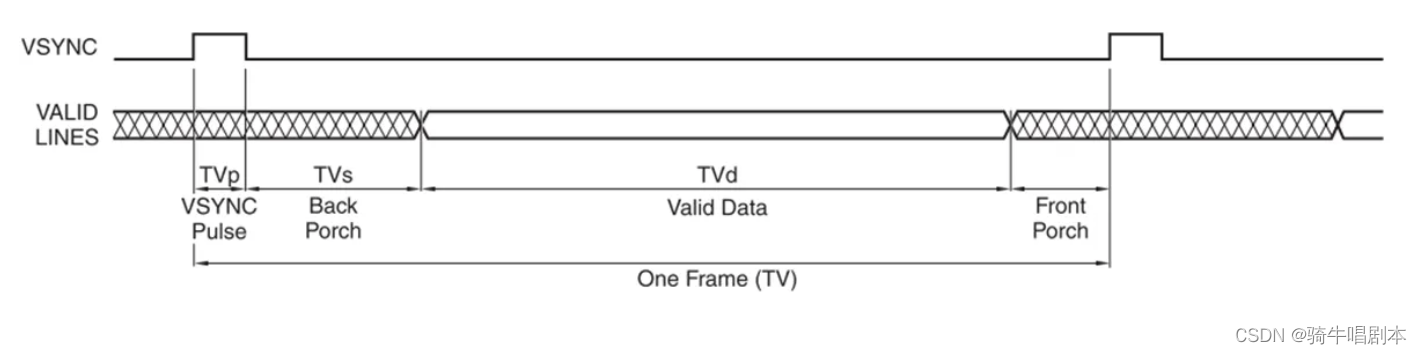
\qquad 上图中VSYNC垂直同步信号,当产生如图所示的变化,就代表新的一帧数据马上开始传送。那么这里怎么没有有效数据信号DEN呢??
\qquad 其实很简单,因为新的一帧数据不就是从LCD第一行的第一个像素开始填充嘛,那么前面我们已经说明了每一行都自己的同步信号,而每一行也有对应的数据有效信号线。所以垂直同步信号只用关心从一帧数据的同步,而不同关心每一行的同步。
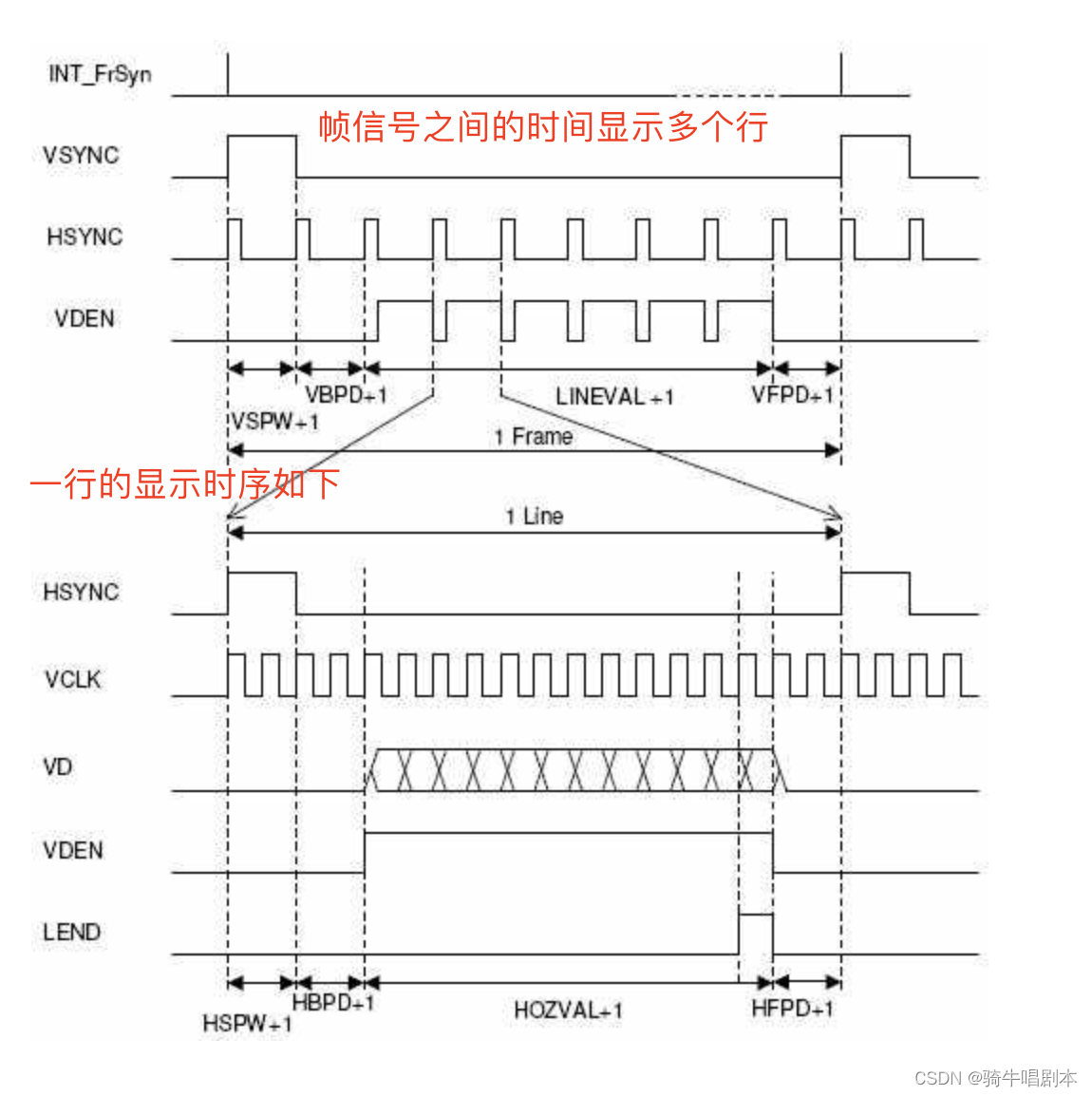
于是,我们将上面分析的时钟放在一起,就变成了LCD RGB模式的典型时序图 。
2.4 控制时序
\qquad 时序图完整的描述了几个不同的控制信号之间如何相互协作。以及各个信号之间的工作间隔时间等。对于LCD控制器的寄存器设置的相关参数,也在这个时序图中描述。
\qquad 下面这个是一个典型的完整的时序图。
图2.2
控制信号释义:
| 信号 | 名称 | 作用 |
|---|---|---|
| VD(Video Data) | 数据信号 | 用于传输图像的像素数据。每个像素的颜色信息通过VD信号传输。 |
| HSYNC(Horizontal Sync) | 水平同步信号 | 用于同步每行图像数据的传输。每发出一个HSYNC脉冲,表示新的一行图像数据开始发送。 |
| VSYNC(Vertical Sync) | 垂直同步信号 | 用于同步每帧图像数据的传输。每发出一个VSYNC脉冲,表示新的一帧图像数据开始发送。 |
| VDEN(Video Data Enable) | 数据有效标志 | 与HSYNC和VSYNC信号结合使用。VDEN信号表示VD数据的有效性,只有在VDEN为高电平时,VD数据才是有效的。 |
| LEND(Line End) | 行结束标志 | 是一种时序信号,用于表示一行图像数据的结束。不是所有接口都需要使用LEND信号,例如210接口就没有。 |
| VCLK(Video Clock) | 时钟信号 | 用于同步图像数据的传输。VCLK信号的频率决定了图像数据的传输速度。 |
\qquad 想象每个像素点是由电子枪发射出来的,电子枪依次扫描整个LCD界面,就显示了一副完整的图像。
\qquad 当发出一个HSYNC信号后,电子枪就会从行末花费HBP时长移动到行首;然后在VCLK时钟下,在下图中阴影区域显示像素;等到了行末后,再等待HFP时长待HSYNC信号到来,再移动到行首,如此往复。因此,HBP和HFP分别决定了左边和右边的黑框。
\qquad 同理,当发出一个VSYNC信号后,电子枪就会从列末花费VBP时长移动到列首;然后在VCLK时钟下,在图中阴影区域显示像素;等到了列末后,再等待VFP时长待VSYNC信号到来,再移动到列首,如此往复。因此,VBP和VFP分别决定了上边和下边的黑框。
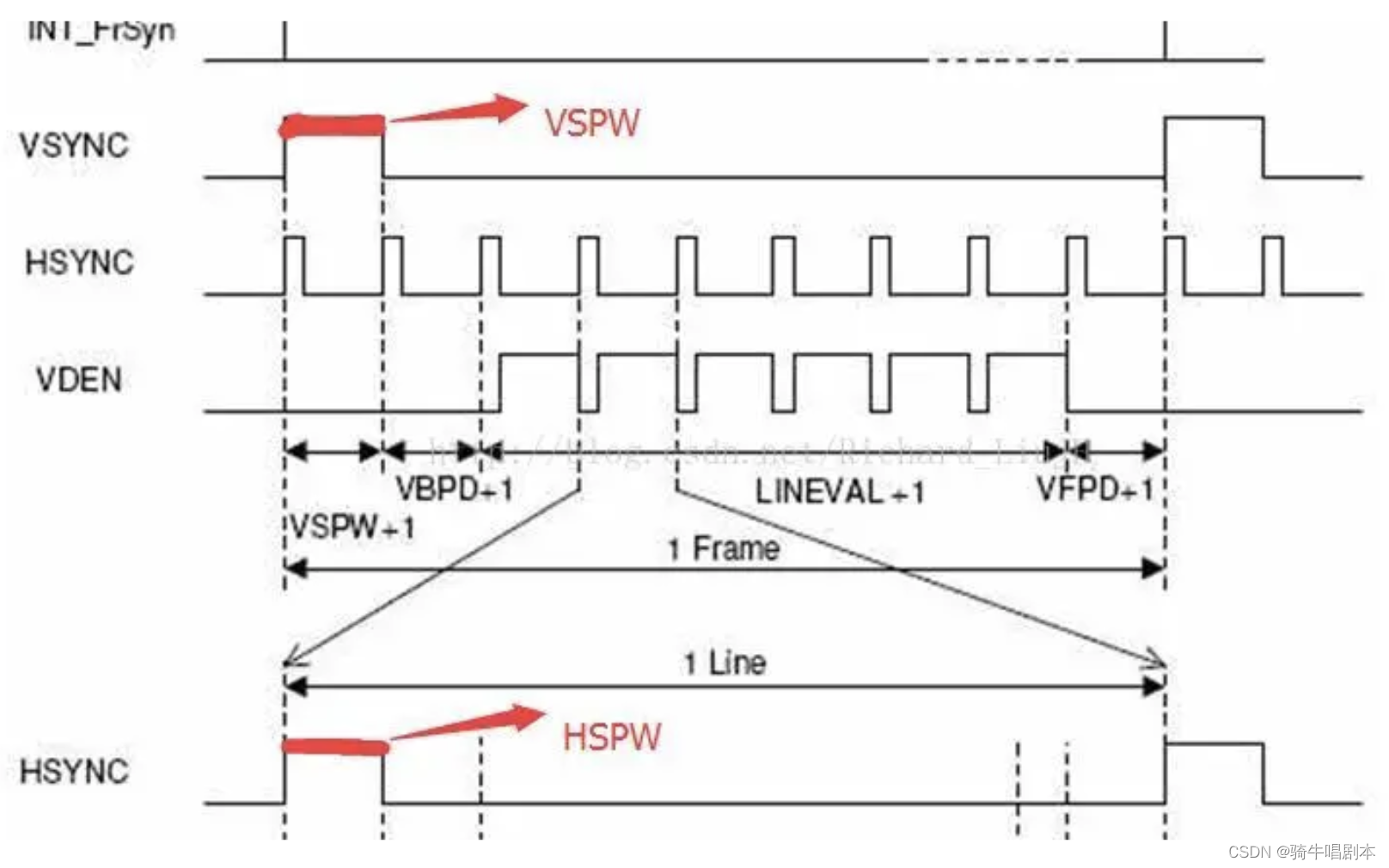
2.5 LCD时序与显示的映射关系
下图是从LCD控制器的角度理解的显示映射关系:
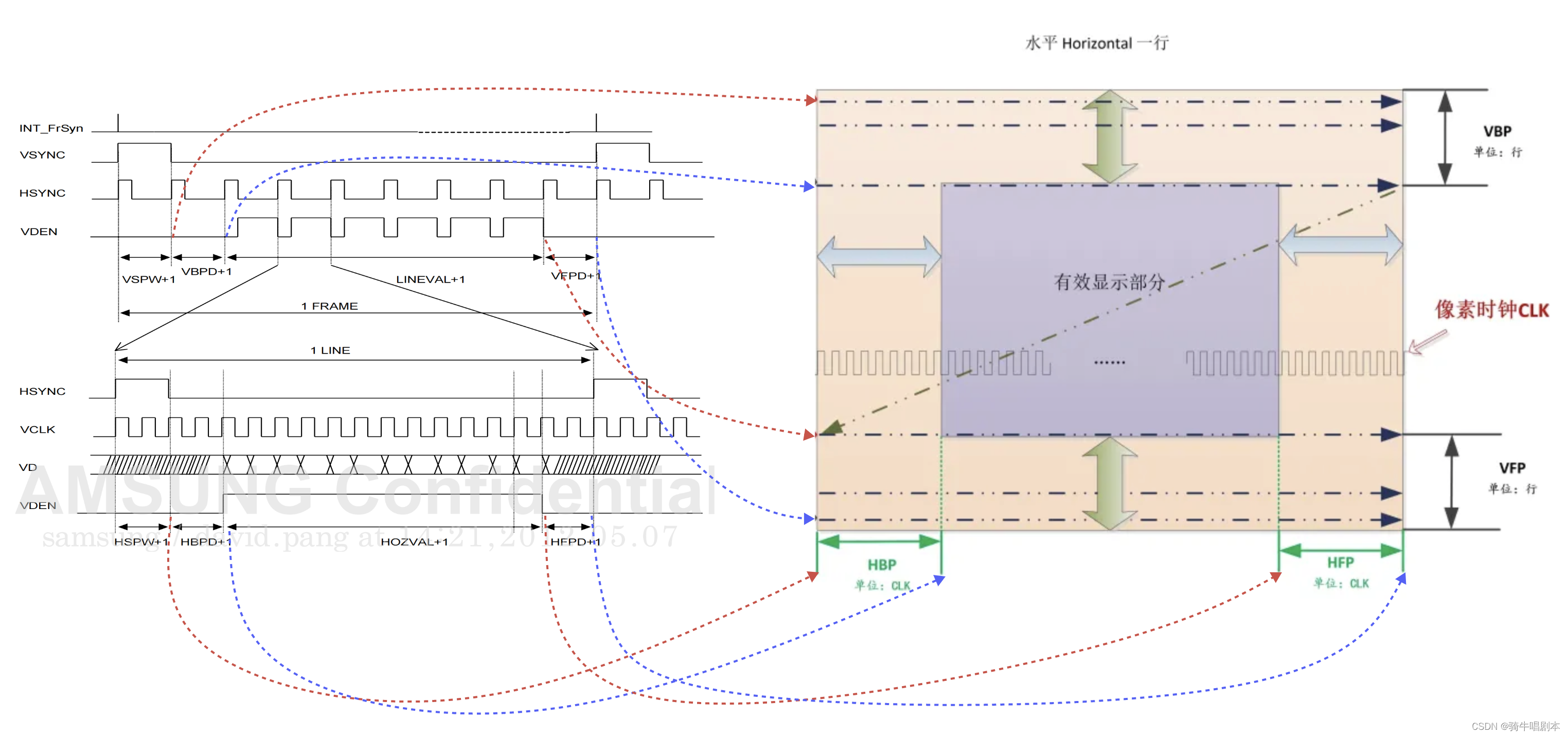
显示步骤
为了更好的理解上图,总结成以下几个过程:
- 1、产生垂直信号,表示一帧数据将要开始
- 2、经过VBP个行后才开始有效数据的第一行 (类似上边距)
- 3、经过HBP(具体的数值在后面会解释)个CLK后才开始传输每行的有效数据。(类似调整了A4纸张的左边距)
- 4、每行有效数据传输完毕,经过HFP个CLK后才开始下一行。(类似右边距)
- 5、重复3和4两个步骤一直到有效行显示完。
- 6、有效行显示完毕后,经过VFP个行后再开始下一帧数据 (类似下边距)
时序参数的含义如下,参照上图理解:
| 英文缩写 | 名称 | 作用 |
|---|---|---|
| HSPW(Horizontal Sync Pulse Width) | 行同步信号的脉宽 | 单位为1VCLK的时间。 |
| HBP(Horizontal Back Porch) | 水平后肩 | 水平同步信号HSYNC的下降沿到VDEN的上升沿的间隔称为HBP。单位为1VCLK的时间。在图中为HBPD+1。 |
| HFP(Horizontal Front Porch) | 水平前肩 | 把VDEN的下降沿到水平同步信号HSYNC的上升沿的间隔称为HFP,单位为1VCLK的时间。在图中为HFPD+1。 |
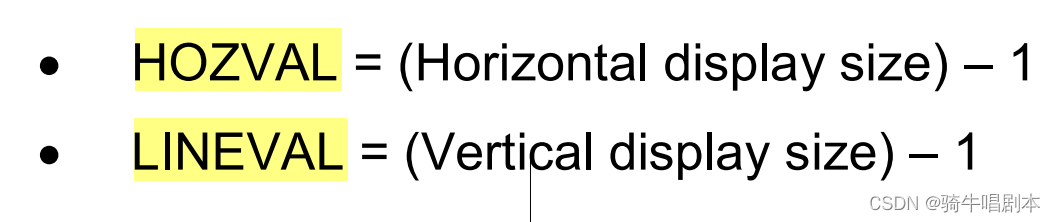
| HOZVAL | 行显示尺寸-1,即屏列宽-1 | 对于800*480分配率的LCD屏,那么HOZVAL=800-1=799,请记住,是屏列宽,也就是LCD屏显示一行数据所需要的像素(pixel)的数目。 |
| VSPW(Vertical Sync Pluse Width) | 帧同步信号的脉宽 | 单位为1行(Line)的时间。 |
| VBP(Vertical Back Porch) | 垂直后肩 | 垂直同步信号VSYNC下降沿到VDEN信号产生之前的一个行同步信号VHSYNC的上升沿之间隔。单位为1行(Line)的时间。在图中为VBPD+1。 |
| VFP(Vertical Front Porch) | 垂直前肩 | VDEN数据信号的下降沿到垂直同步信号VSYNC产生的上升沿之间隔。单位为1行(Line)的时间。在图中为VFPD+1。 |
| LINEVAL | 帧显示尺寸-1,即屏行宽-1 | 对于800*480分配率的LCD屏,那么LINEVAL=480-1=479,请记住,是屏行宽,也就是LCD屏显示一帧数据所需要的行的数目。 |
VSPW、HSPW这两个值其实很简单,其中的W代表width也就是宽度的意思。所以这两个值分别描述的是垂直信号和水平信号的宽度,如下图所示。
时间计算:
由图2.2可知:
- 扫描一帧所需的时间: T = ( ( VSPW+1 ) + ( VBPD + 1 ) + ( LINEVAL + 1) + ( VFPD + 1 ) ) 个行时间。
- 扫描一行所所需的时间: = ( ( HSPW + 1 ) + ( HSPD + 1 ) + ( HFPD + 1 ) + ( HOZVAL + 1 ) ) 个VCLK时间。
而一个VCLK时间由LCD寄存器VIDCON0内的CLKVAL决定:
- VCLK = HCLK / ( CLKVAL + 1 ) ------>这个公式是exynos4412的LCD控制器的,其他CPU的不一定一样
因此扫描一帧所需的时间:
- T = [(VSPW+1)+(VBPD+1)+(LINEVAL+1)+(VFPD+1)] * [(HSPW+1)+(HSPD+1)+(HFPD+1)+ (HOZVAL+1)] * HCLK/ (CLKVAL+1)
即帧频率为:1/T
2.6 linux对LCD时序的抽象
下图为从linux角度对lcd时序的理解,这与前面从LCD控制器的角度对lcd时序的理解差别在于hsync_len和vsync_len。这实际是没有区别的,只是理解的角度不同。因要写的是linux的驱动,因此要清楚从linux的角度是如何映射的。
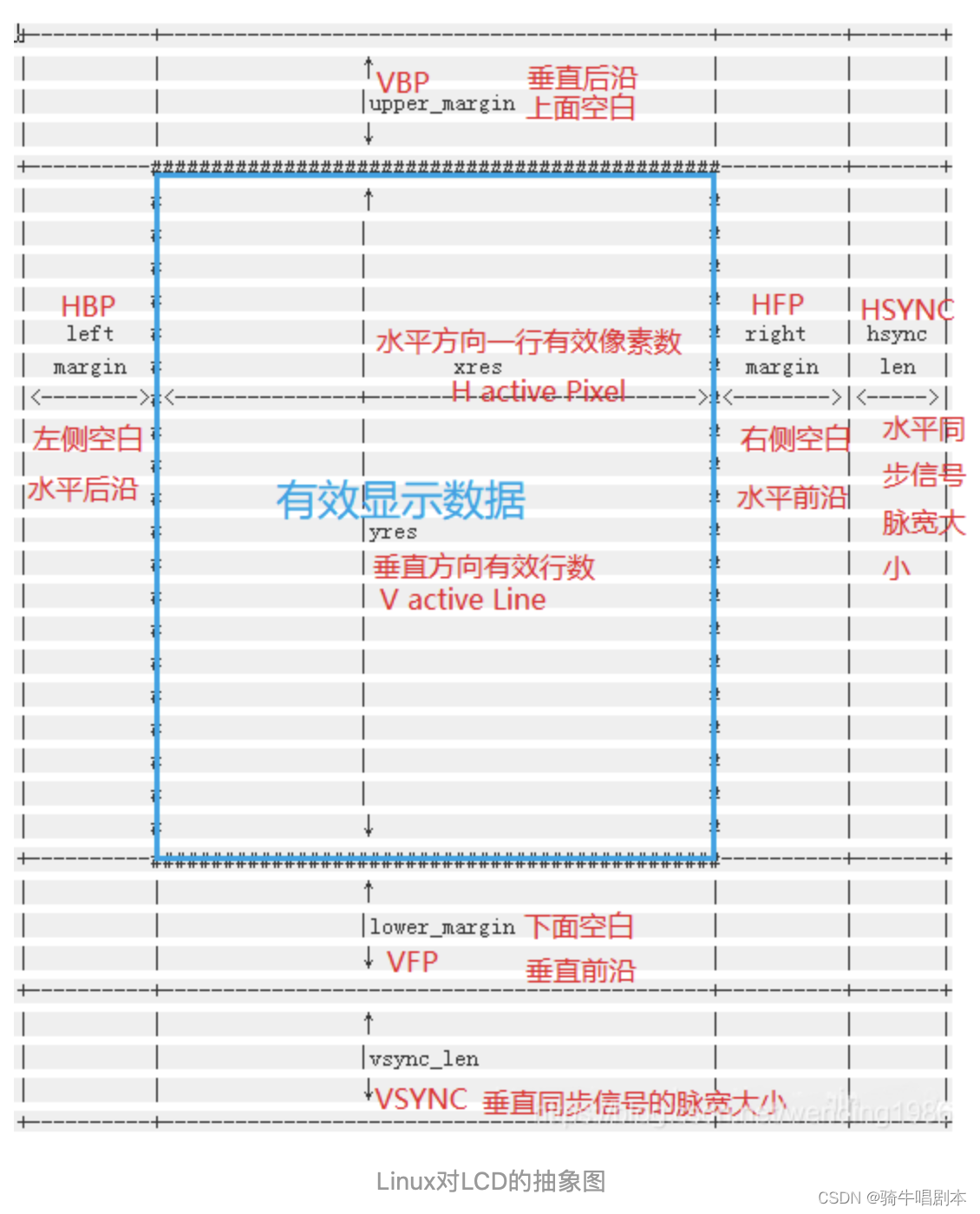
对应如下这个数据结构体:
2.6.1 struct fb_videomode 显示参数结构体
/* include/linux/fb.h */
struct fb_videomode {
const char *name; 可选的视频模式名称。这个成员用于存储视频模式的名称,可以是一个字符串。
u32 refresh; 可选的刷新率。这个成员用于指定视频模式的刷新率,以每秒刷新次数表示。
u32 xres; 显示的水平分辨率。这个成员表示图像在屏幕上的水平像素数。
u32 yres; 显示的垂直分辨率。这个成员表示图像在屏幕上的垂直像素数。
u32 pixclock; 像素时钟频率。这个成员表示像素时钟的频率,用于计算图像的时序。
u32 left_margin; /*HBP*/ " 在每行象素数据开始输出前,需要要插入的空闲象素时钟周期数"
u32 right_margin; /*HFP*/ " 在每行象素数据结束到LCD行同步时钟脉冲之间,插入的空闲象素时钟数"
u32 upper_margin; /*VBP*/ " 在垂直同步脉冲之后,每帧开头前的无效行数"
u32 lower_margin; /*VFP*/ " 每帧数据输出结束到下一帧垂直同步时钟周期开始前的无效行数"
u32 hsync_len; /*HSYNC 或 HPW 或 HWH*/ " 行同步脉宽,水平同步时钟的脉冲宽度"
u32 vsync_len; /*VSYNC 或 VPW 或 VWH */ " 帧同步脉宽,垂直同步时钟的脉冲宽度"
u32 sync; "同步极性设置,可根据需要设置FB_SYNC_HOR_HIGH_ACT(水平同步高电平有效)和FB_SYNC_VERT_HIGH_ACT(垂直同步高电平有效)"
u32 vmode; 显示模式。这个成员指定了显示器的模式,例如非隔行模式或隔行模式。
u32 flag; 标志位。这个成员用于指示视频模式的一些特性和选项,例如是否支持透明度等
}; 重要参数详解:
- pixclock 像素时钟频率,在时序图上有时称DCLK 、VCLK 、CLK等,都 是一个意思。如:65MHZ的频率,这里要填写pixclock = 65000000。
- sync成员用于指定同步信号的类型,可以是水平同步、垂直同步或两者的组合。
-
- FB_SYNC_HOR_HIGH_ACT:表示水平同步信号在高电平时激活。在某些视频模式中,需要在高电平时发送水平同步信号。
-
- FB_SYNC_VERT_HIGH_ACT:表示垂直同步信号在高电平时激活。在某些视频模式中,需要在高电平时发送垂直同步信号。
-
- FB_SYNC_EXT:表示使用外部同步信号。某些设备可能支持使用外部同步信号而不是内部的同步信号。
-
- FB_SYNC_COMP_HIGH_ACT:表示复合同步信号在高电平时激活。复合同步信号是基于水平和垂直同步信号组合而成的同步信号。
-
- FB_SYNC_BROADCAST:表示广播视频时所使用的视频定时信息。在PAL制式下,垂直总行数为144行(渐进扫描)或288行(隔行扫描);在NTSC制式下,垂直总行数为121行(渐进扫描)或242行(隔行扫描)。
-
- FB_SYNC_ON_GREEN:表示同步信号发送在绿色通道上。某些视频模式可能需要使用绿色通道来传输同步信号。
- vmode成员用于指定视频模式的类型,可以是以下几种常见的填写方式:
-
- FB_VMODE_NONINTERLACED:表示非隔行模式,也即渐进扫描模式。在这种模式下,视频图像的每一帧都是通过逐行扫描显示的。
- - FB_VMODE_INTERLACED:表示隔行模式,也即隔行扫描模式。在这种模式下,视频图像的每一帧由两个交替的场组成,每个场只显示图像的一半行数,通过交替显示两个场来达到全帧显示的效果。
- FB_VMODE_NONINTERLACED:表示非隔行模式,也即渐进扫描模式。在这种模式下,视频图像的每一帧都是通过逐行扫描显示的。
-
- FB_VMODE_DOUBLE:表示双帧缓冲模式。在这种模式下,使用两个帧缓冲器来交替渲染显示图像的每一帧,可以减少视频闪烁的效果。
-
- FB_VMODE_ODD_FLD_FIRST:表示隔行模式下,先显示奇数场。在某些设备上,隔行扫描模式下,可以选择先显示奇数场还是偶数场。
-
- FB_VMODE_MASK:用于屏蔽其他标志位,只保留视频模式的相关信息。
-
- FB_VMODE_YWRAP:表示使用y轴环绕而不是滚动。在某些设备上,可以选择使用y轴环绕来显示图像而不是滚动显示。
-
- FB_VMODE_SMOOTH_XPAN:表示支持平滑的水平滚动。在某些设备上,可以平滑地滚动图像而不是简单地按照整数像素进行滚动。
-
- FB_VMODE_CONUPDATE:表示不要更新x和y偏移量。在某些设备上,可能希望固定x和y偏移量而不更新它们。
\qquad 在使用struct fb_videomode时,可以参考设备文档或相关的驱动程序来确定正确的填写方式。
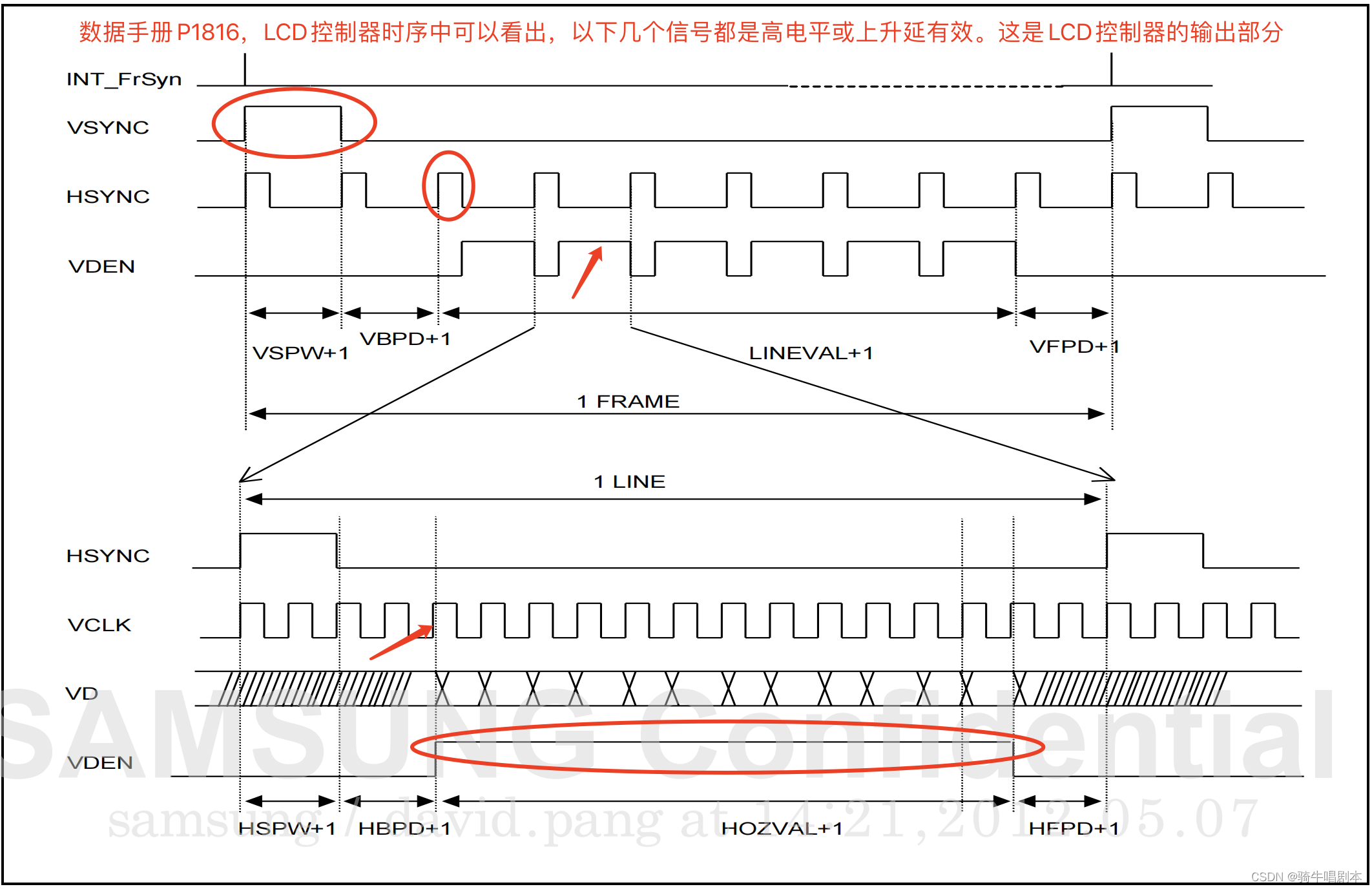
2.6.2 判断 HSYNC,VSYNC,VCLK, VDEN信号是否需要反转
\qquad 在图2.1中可以看到,Soc上的LCD控制器与LCD屏上的LCD驱动器在对信号的理解不一定一样。比如,LCD驱动器会认为某个信号是低电平有效,这可能与LCD控制器发出的信号含义相反。因此,在LINUX驱动程序编写前,必须确定某个LCD控制器发出的信号是否要反转。并对需要反转的信号,要到相应的控制寄存器中去设置。
\qquad 要如何判断某个信号是否反转,这就需要对比SOC数据手册中LCD控制的时序图与LCD屏的数据手册的时序图,以此来判断:
\qquad 先看LCD控制器默认情况下送出来的TFT LCD屏的时序图:
图2.3-exynos4412 lcd控制器输出时序
\qquad 再来看屏厂的时序图:
图2.4:LCD屏时序图
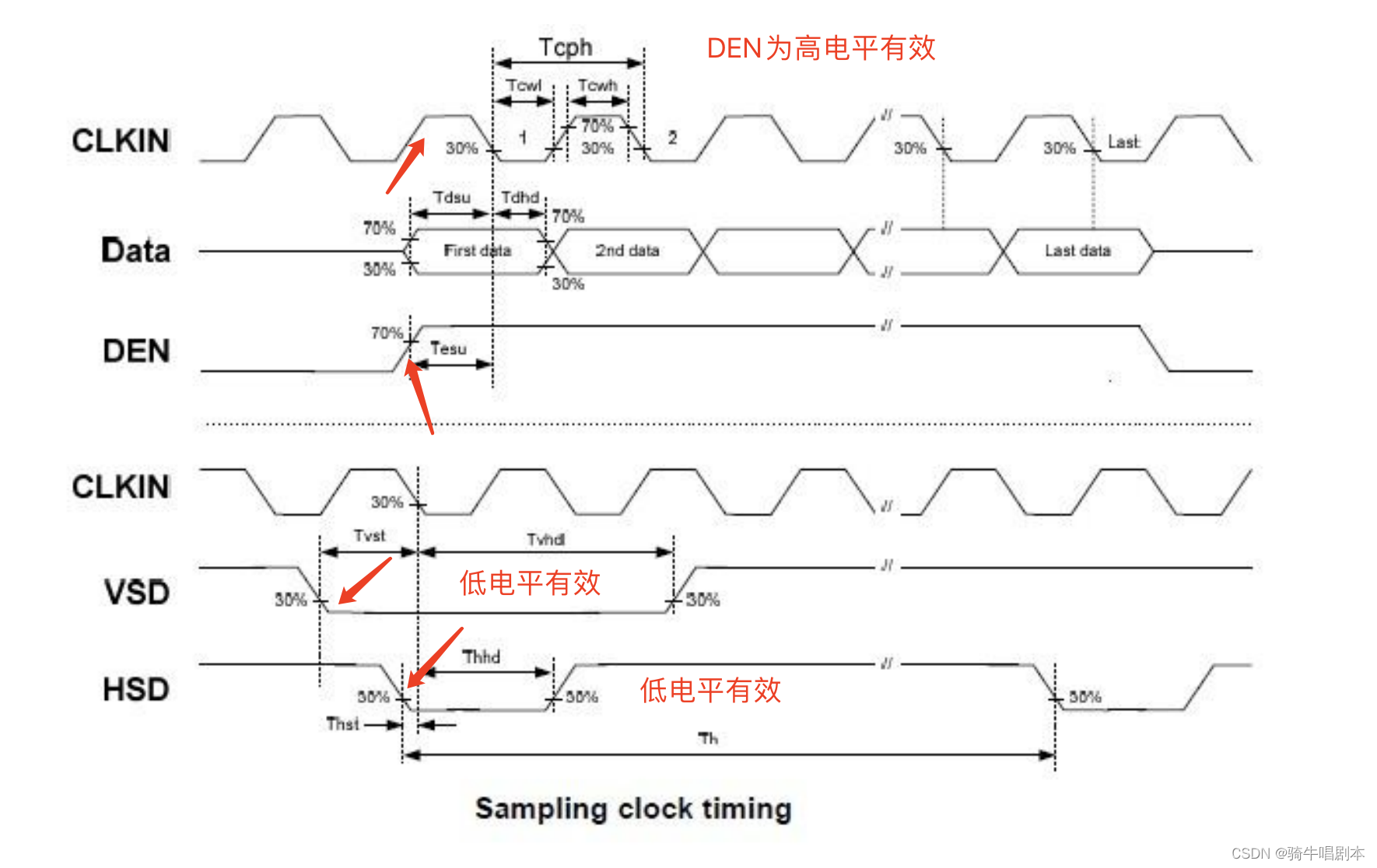
从上两图对比,可以看出实验用屏的VSYNC与HSYNC需要反转。
另外,从屏厂还提供的信号周期表,用来填写驱动的相应结构体和寄存器:
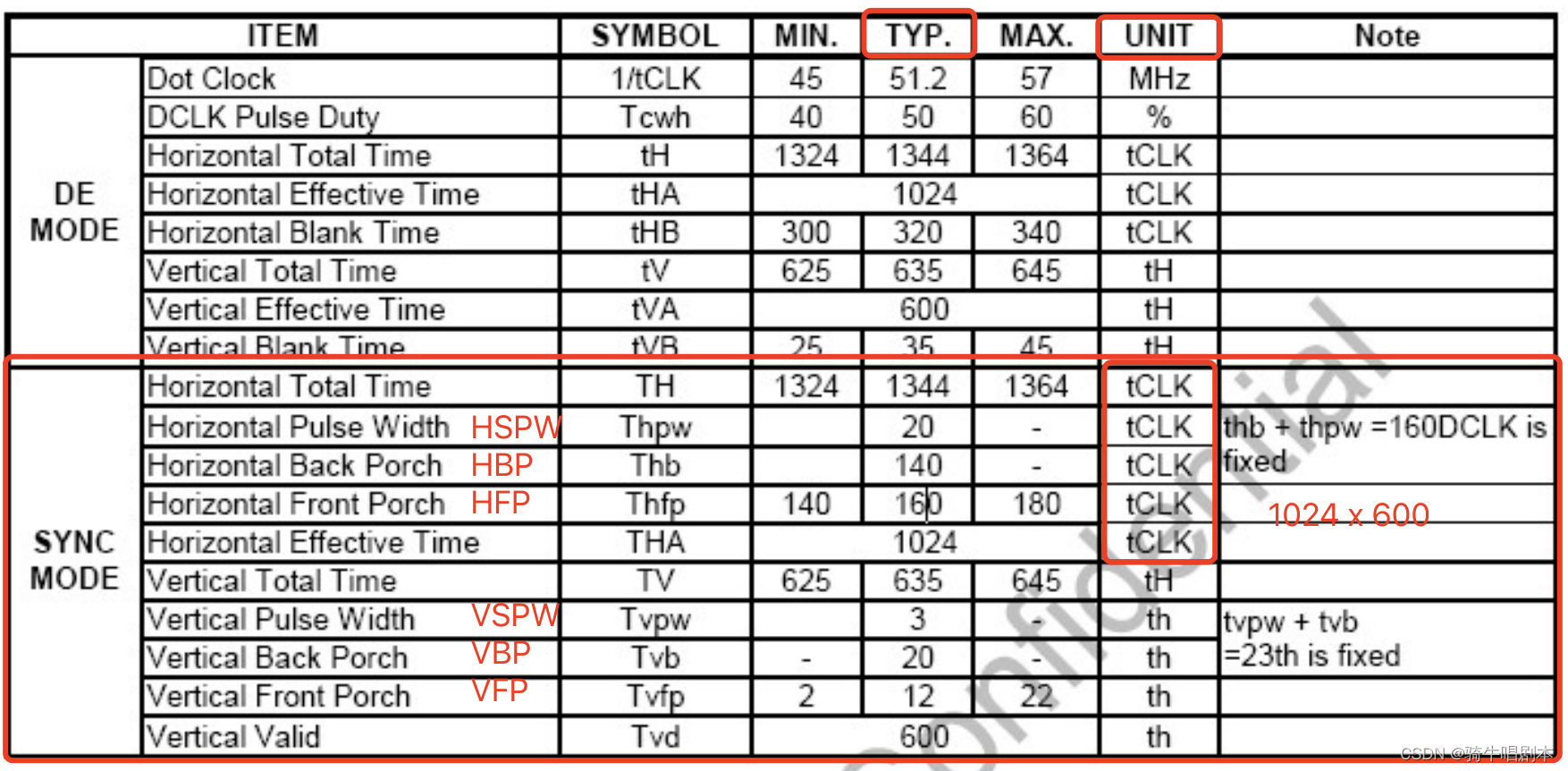
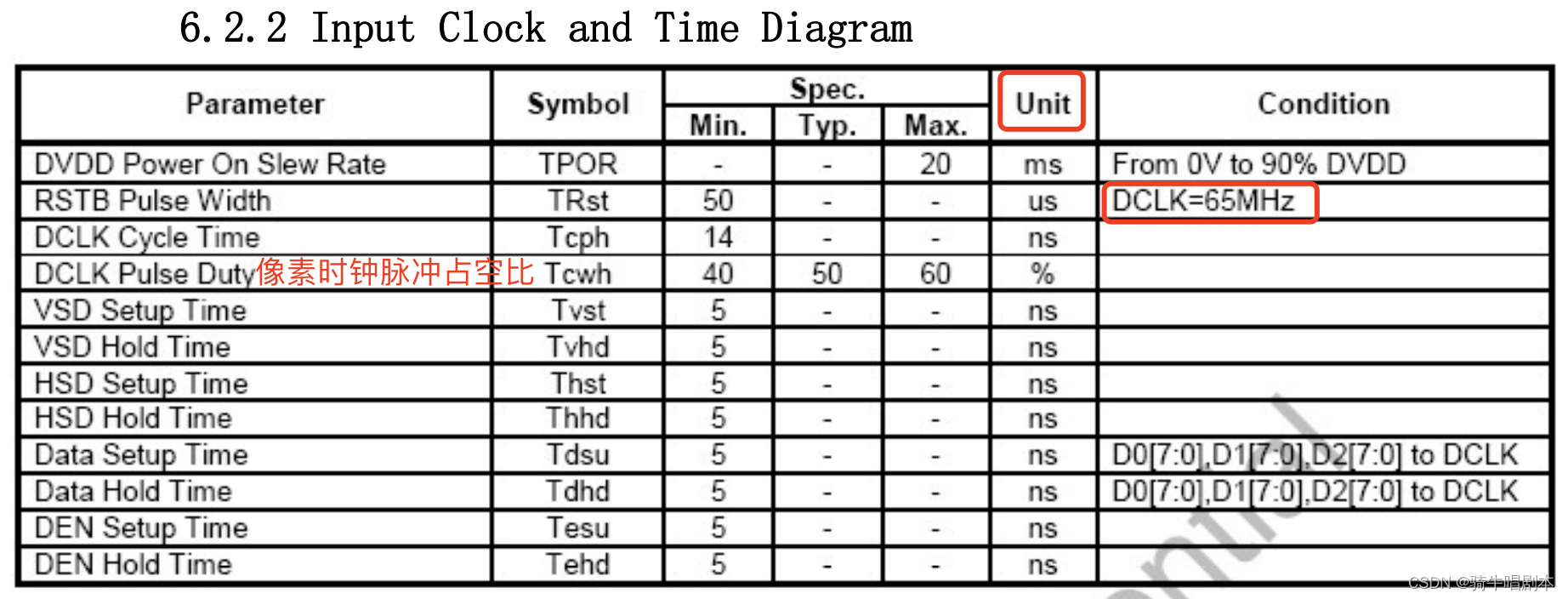
以上这两张图,在后面具体讲lcd屏驱动时,需要用到。
bpp(bits per pixel 像素深度):表示一个像素的颜色状态需要用几位来表示
1位:单色显示,只有亮灭之分,常见的如小店招牌
8位:灰度显示,此时能表示256种颜色,这时候显示不了色彩,但是有了黑白明暗的区别
16位:一般是RGB565的颜色分布,即16位色
24位:RGB888的颜色分布,称之为24位真彩
32位:还是RGB888的颜色分布,剩下的8位代表透明度,故称之为ARGB,是目前主流
3、实验环境介绍
- 开发板:华清fs4412
- SoC : samsung exynos4412 arm-A9框架
- LCD:7寸电容触摸tft-lcd屏,分辨率1024 x 600
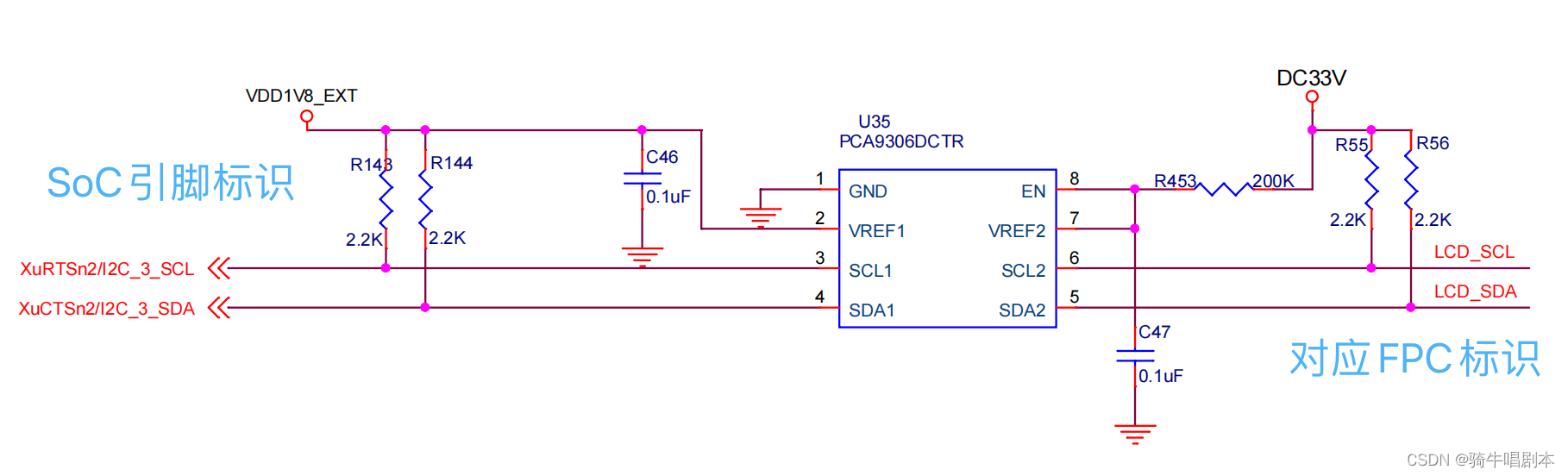
- 驱动接口:并行24位RGB接口, 触摸屏I2C接口
- 物理接口:40P 间距0.5mm FPC连接器
- linux内核 : 3.14
- 交叉编译环境:arm-linux-gnueabi-
- FPC连接器定义:

- SoC侧gpio接口定义
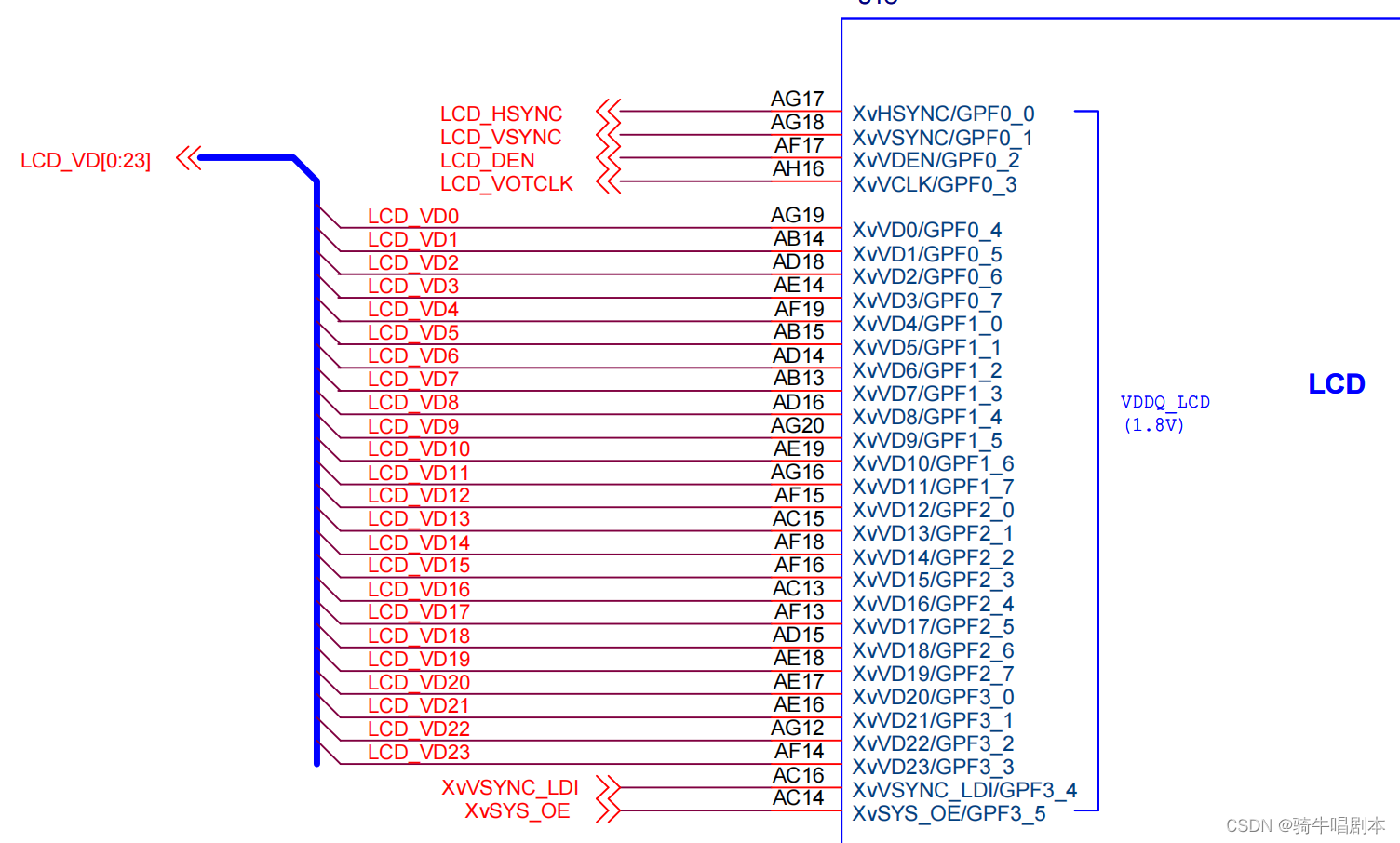



这样,所有的LCD屏与开发板相连接的引脚,都能一一对应到SoC上的GPIO脚上了。
- 驱动框架:FrameBuffer帧缓冲驱动框架
4、 exynos4412的LCD控制器相关知识点介绍
由于在linux3.14环境中,在实际编写LCD驱动程序中,不仅涉及到上面所介绍的相关lcd的控制原理,也涉及到如何设置LCD控制寄存器的相关。以下是对exynos4412的数据手册《(4412手册完整版)SEC_Exynos 4412 SCP_Users Manual_Ver.0.10.00_Preliminary》摘录与翻译:
4.1 显示控制器介绍
\qquad exynos4412的LCD驱动程序接口支持三种接口。它们是RGB接口、间接i80接口和用于写回的YUV接口。显示控制器使用多达五个覆盖图像窗口,这些窗口支持各种颜色格式、256级alpha混合、颜色键、x-y位置控制、软滚动和可变窗口大小等。显示控制器支持各种颜色格式,如RGB(1到24BPP)和YCbCr 4:4:4(仅本地总线)。
\qquad 您可以对显示控制器进行编程,以支持屏幕上与水平和垂直像素数、数据接口的数据线宽、接口定时和刷新率相关的不同要求。
\qquad 显示控制器传输视频数据并生成必要的控制信号,例如RGB_VSYNC、RGB_HSYNC、RGB VCLK、RGB_VDEN、SYS_CS0、SYS_CS1和SYS_WE。除了生成控制信号外,显示控制器还包含视频数据的数据端口(RGB_VD[23:0]和SYS_VD)
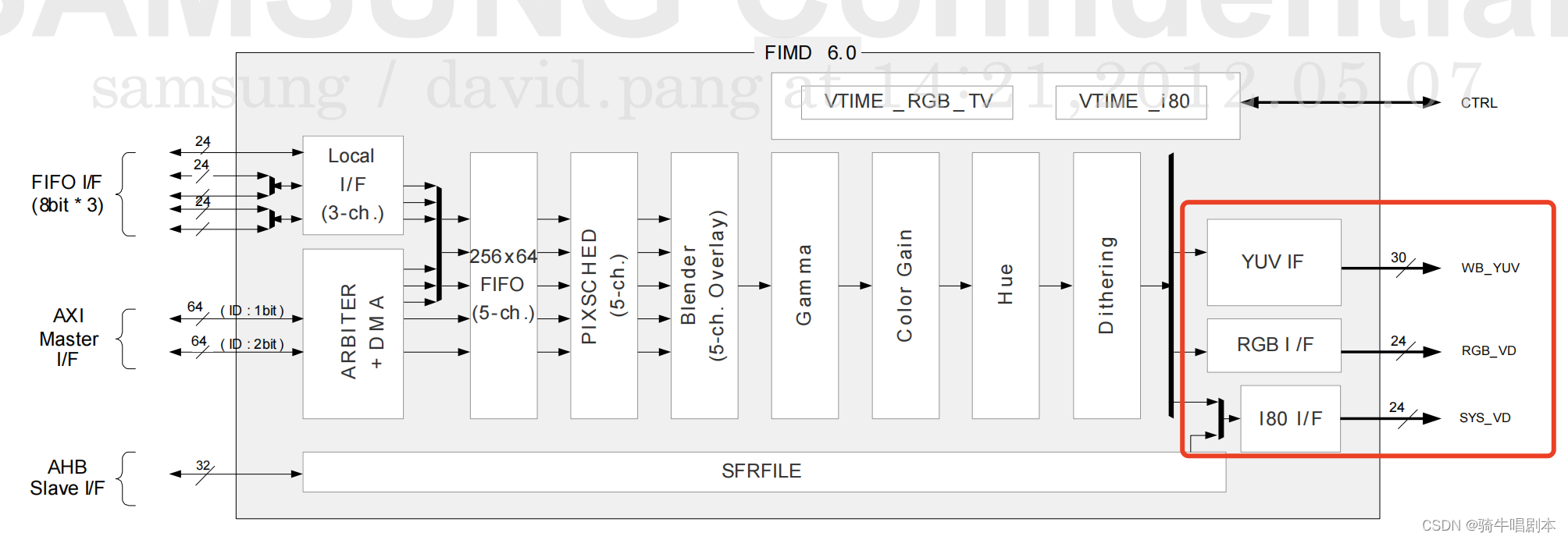
exynos4412可以支持红框中的三种接口形式。
控制器的相关特性:
Maximum VCLK in RGB Interface 80MHz
Video Clock Source: SCLK_FIMD0 for display controller (from CMU module)
4.2 时钟
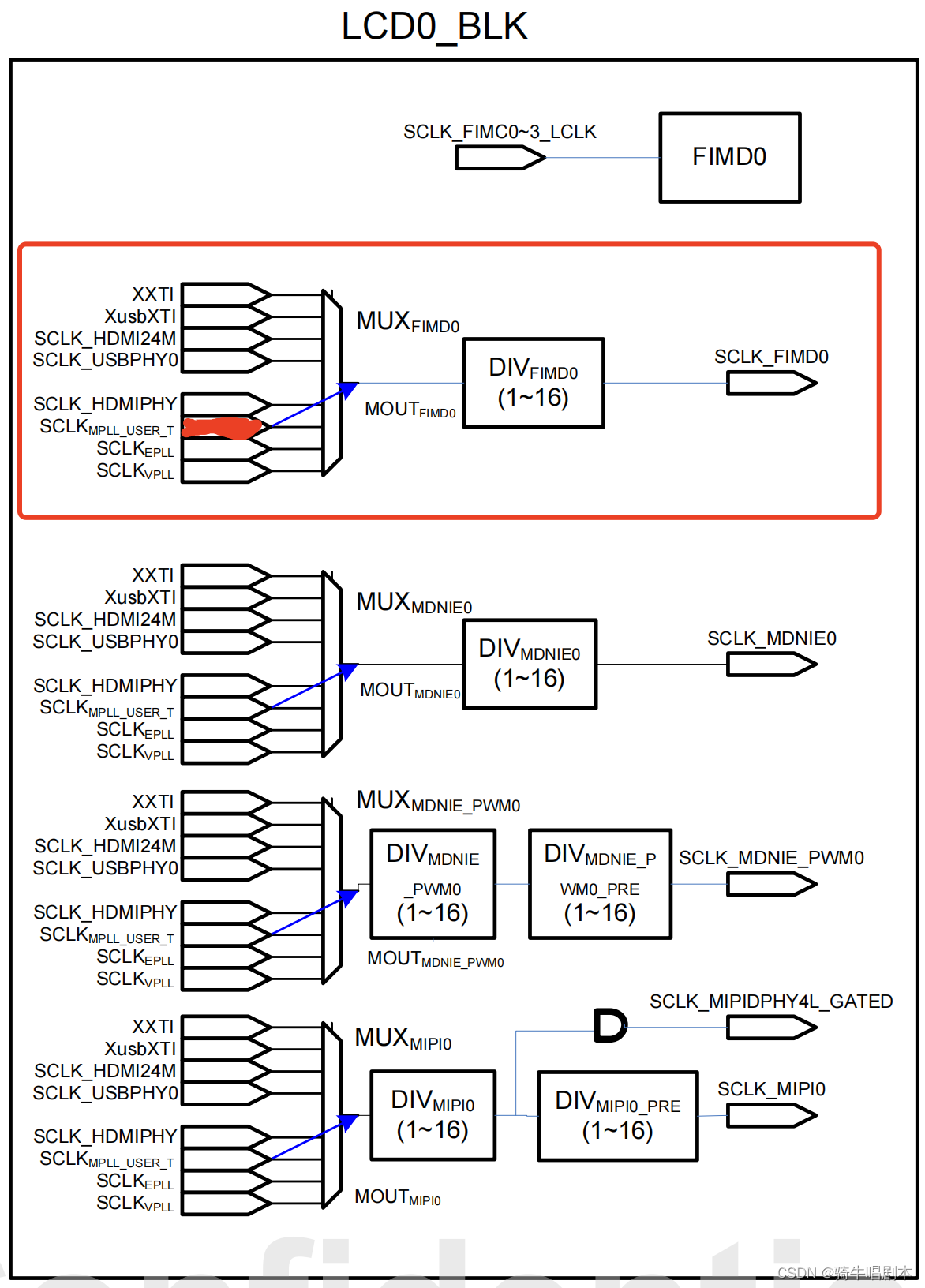
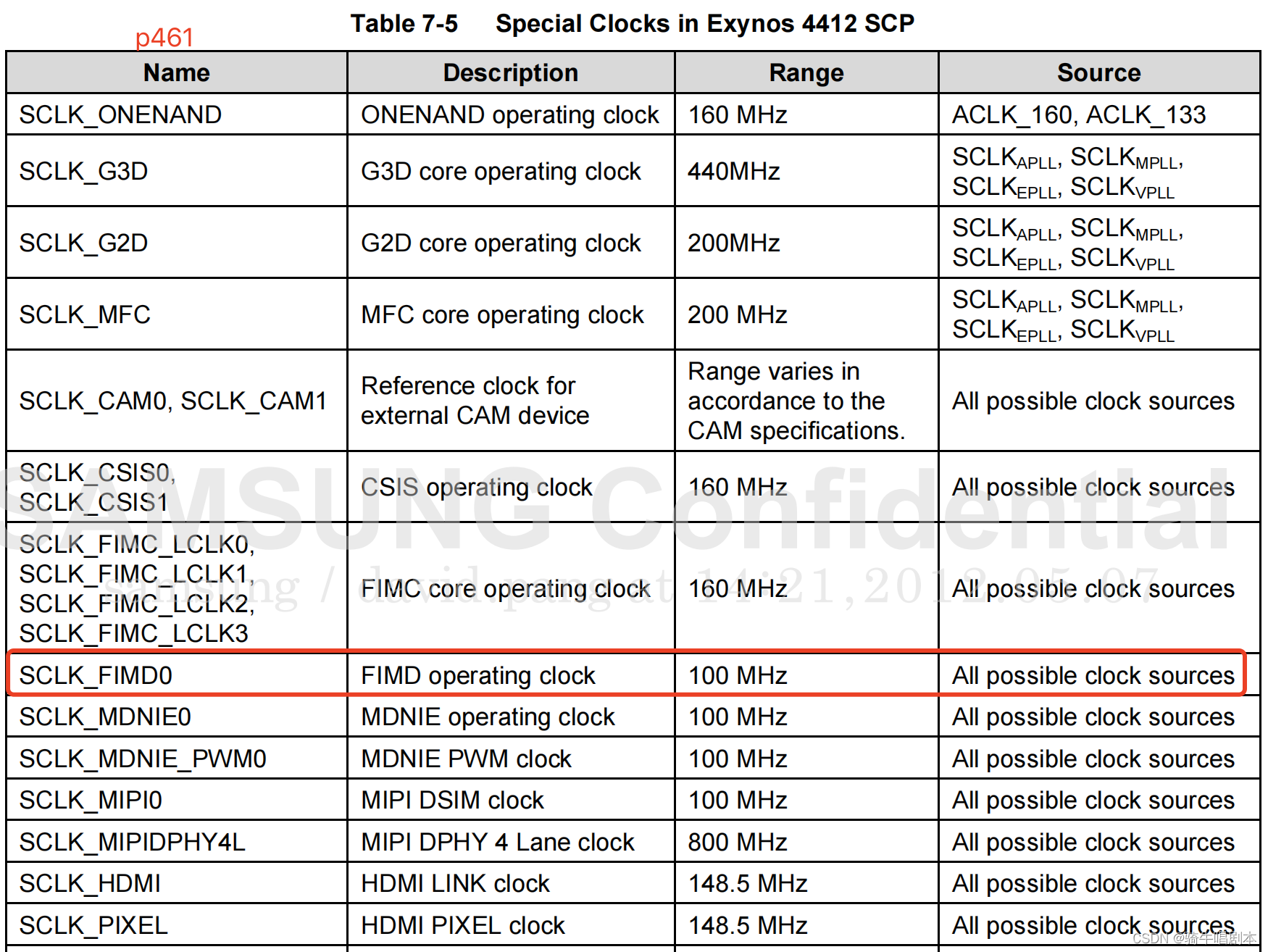
Exynos 4412 SCP时钟生成电路(特殊时钟)- lcd模块时钟:
4.3 RGB接口
4.3.1 RGB接口控制器
显示控制器由VSFR、VDMA、VPRCS、VTIME和视频时钟发生器组成。
要配置显示控制器,VSFR具有
- 121个可编程寄存器组
- 一个伽玛LUT寄存器组(64个寄存器)
- 一个i80命令寄存器组(12个寄存器)
- 五个 256 x 32个调色板存储器
VDMA是一种专用的显示DMA,用于将帧存储器中的视频数据传输到VPRCS。通过使用这种特殊的DMA,您可以在屏幕上显示视频数据,而无需CPU干预。
VPRCS从VDMA接收视频数据,并通过数据端口(RGB_VD或SYS_VD)将其发送到显示设备(LCD),在将视频数据更改为合适的数据格式后,例如,每像素8位模式(8BPP模式)或每像素16位模式(16BPP模式)。
VTIME由可编程逻辑组成,以支持不同LCD驱动器中常见的接口时序和速率的可变要求。TIME块生成RGB_VSYNC、RGB_HSYNC、RGB_VCLK、RGB_VDEN、VEN_VSYNC、VEN_HSYNC、VEN_FIELD、VEN_HREF、SYS_CS0、SYS_CS1、SYS_WE等。
使用显示控制器数据,可以通过设置LCDBLK_CFG寄存器(0x1001_0210)来选择上述数据路径之一。有关更多信息,请参阅“Chapter 12, System Register Controller, for more information.P884”手册。
VTIME生成用于RGB接口的控制信号,例如RGB_VSYNC、RGB_HSYNC、RGB VDEN和RGB_VCLK信号。在VSFR寄存器中配置VIDTCON0/1/2寄存器时,可以使用这些控制信号。
您可以在VSFR中对显示控制寄存器的配置进行编程。然后,VTIME模块生成支持不同类型显示设备的可编程控制信号。
RGB_VSYNC信号使LCD行指针从显示器顶部开始。HOZVAL字段和LINEVAL寄存器的配置控制RGB_VSYNC和RGB_HSYNC的脉冲生成。基于这些方程,LCD面板的尺寸决定了HOZVAL和LINEVAL:
VIDCON0寄存器中的CLKVAL字段控制RGB_VCLK信号的速率。
CLKVAL的最小值为1。有公式:

其中,SCLK_FIMDx(x=0,1)
计算帧速率的方程式为:

4.3.2 RGB接口规范
RGB接口规范包括:
- 信号
- LCD RGB接口时序
- 并行输出
- 串行8位输出
- 输出配置结构
4.3.3 信号

4.3.4 LCD RGB接口时序
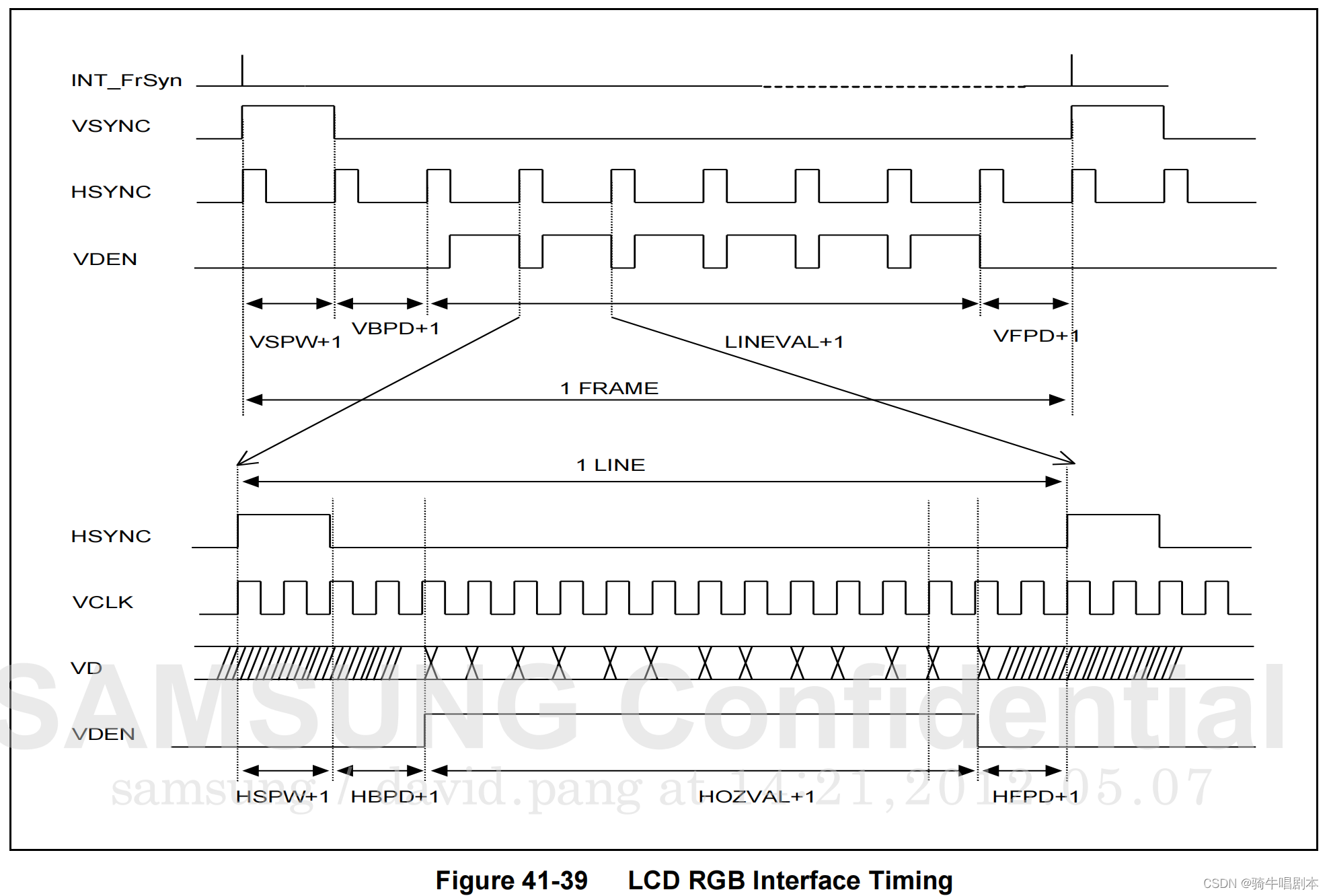
4.4 寄存器
LCD控制器的使用,全部依赖对其提供的寄存器的设置。因此,在开发lcd驱动程序时,必须根据情况去设置寄存器才能使LCD正常工作。因此,以下对LCD所使用的寄存器进行一一的介绍。
4.4.1 寄存器概况
LCD控制器直接操作的寄存器很多,但主要有以下这些。其中的x指代0,1,2…等数值,在使用时要注意区分。
可用于配置显示控制器的寄存器有:
1.VIDCON0:配置视频输出格式并显示启用/禁用。
2.VIDCON1:指定RGB I/F控制信号。
3.VIDCON2:指定输出数据格式控制。
4.VIDCON3:指定图像增强控制。
5.I80IFCONx:指定CPU接口控制信号。
6.VIDTCONx:配置视频输出时序并确定显示器的大小。
7.WINCONx:指定每个窗口功能设置。
8.VIDOSDxA,VIDOSDxDB:指定窗口位置设置。
9.VIDOSDxC,D:指定屏幕显示(OSD)大小设置。
10.VIDWxALPHA0/1:指定alpha值设置。
11.BLENDEQx:指定混合方程式设置。
12.VIDWxxADDx:指定源映像地址设置。
13.WxKEYCONx:指定颜色键设置寄存器。
14.WxKEYALPHA:指定颜色键alpha值设置。
15.WINxMAP:指定窗口颜色控制。
16.GAMMALUT_xx:指定伽玛值设置。
17.COLORGAINCON:指定颜色增益值设置。
18.HUExxx:指定色调系数和偏移值设置。
19.WPALCON:指定调色板控制寄存器。
20.WxRTQOSCON:指定RTQoS控制寄存器。
21.WxPDATAxx:指定每个索引的窗口选项板数据。
22.SHDOWCON:指定卷影控制寄存器。
23.WxRTQOSCON:指定QoS控制寄存器。
4.4.2 寄存器使用详述
这些详细说明的寄存器,都是在LCD驱动中要用到的。
4.4.2.2 时钟寄存器
时钟寄存器是属于系统的时钟的部分,其中涉及到LCD的部分时钟寄存器如下表,基地址为0x1003_C000:
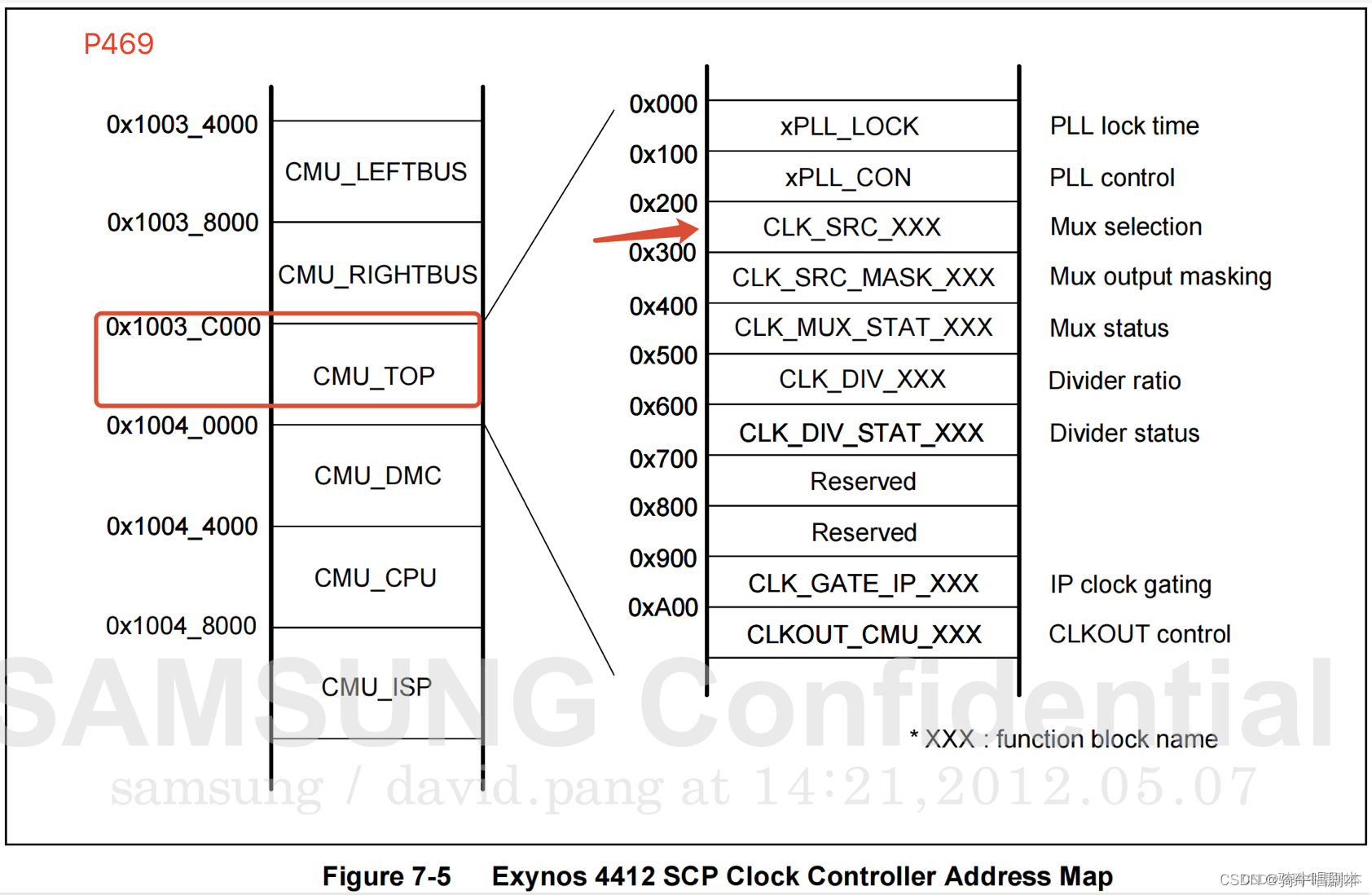
以下为必须要用到的寄存器的详细用法。
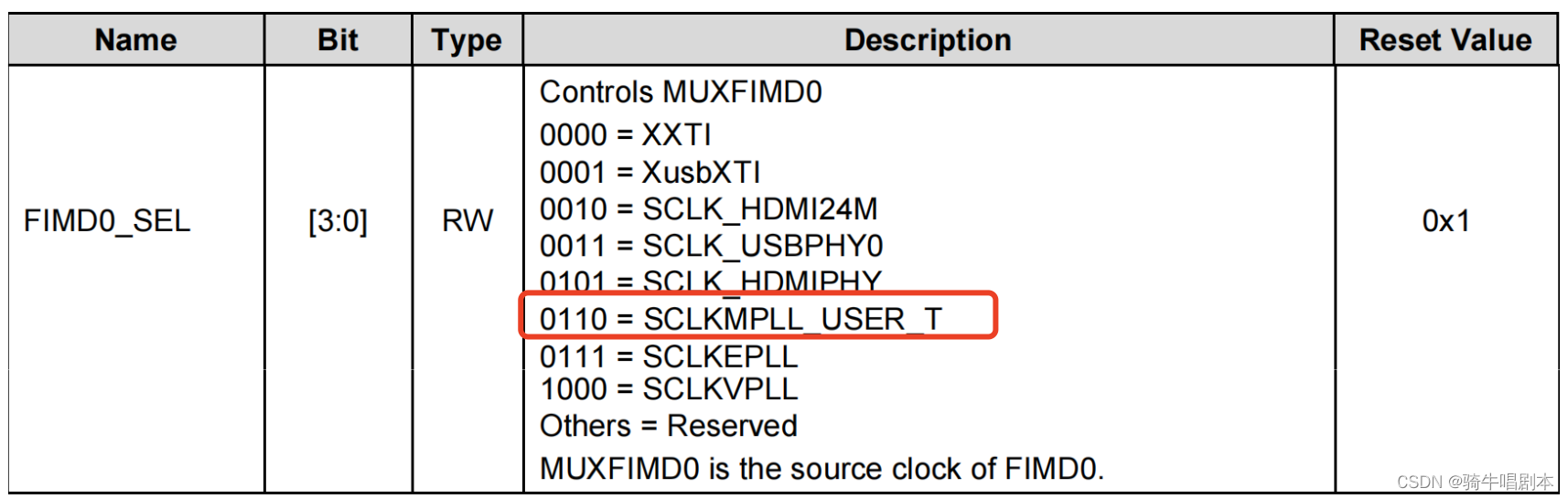
CLK_SRC_LCD0 (P505)
Base Address: 0x1003_0000
Address = Base Address + 0xC234, Reset Value = 0x0000_1111
作用:为LCD_BLK选择时钟源
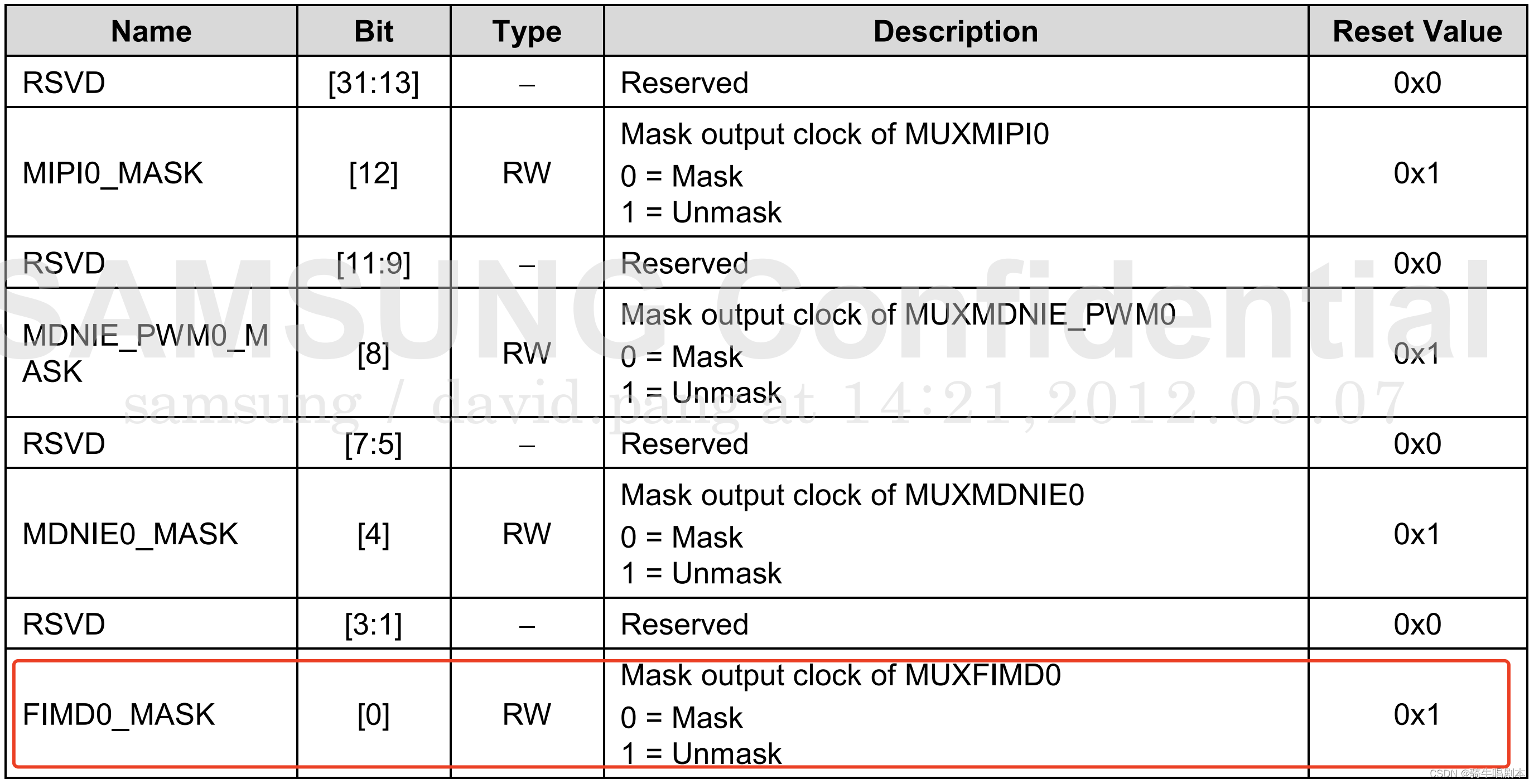
CLK_SRC_MASK_LCD
Base Address: 0x1003_0000
Address = Base Address + 0xC334, Reset Value = 0x0000_1111
作用:LCD BLK的时钟源掩码。如果希望使用外部时钟源来驱动LCD控制器,可以设置CLK_SRC_MASK_LCD寄存器的相应位为1,将其它位设置为0
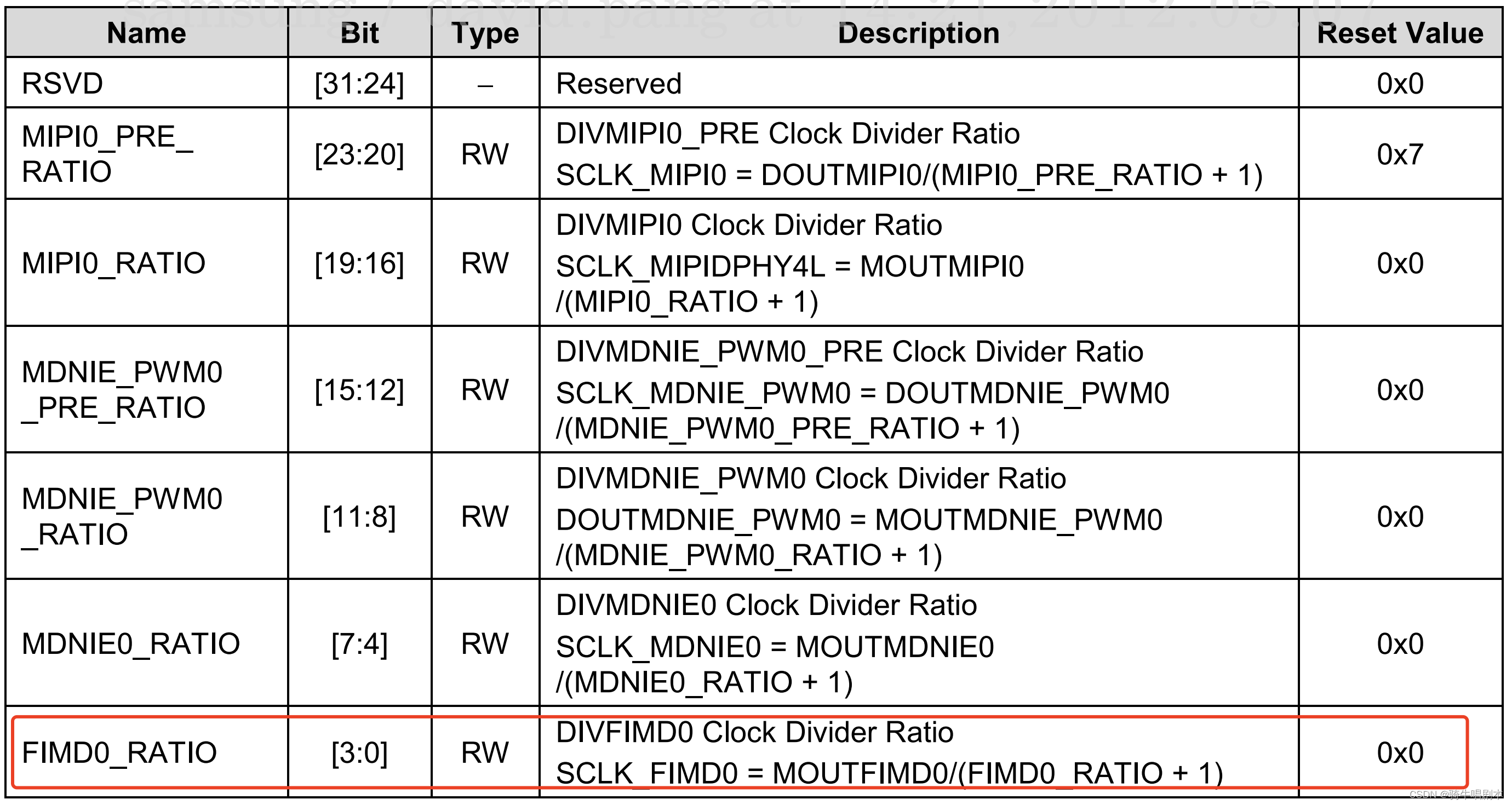
CLK_DIV_LCD (P530)
Base Address: 0x1003_0000
Address = Base Address + 0xC534, Reset Value = 0x0070_0000
作用:设置LCD BLK的时钟分频比
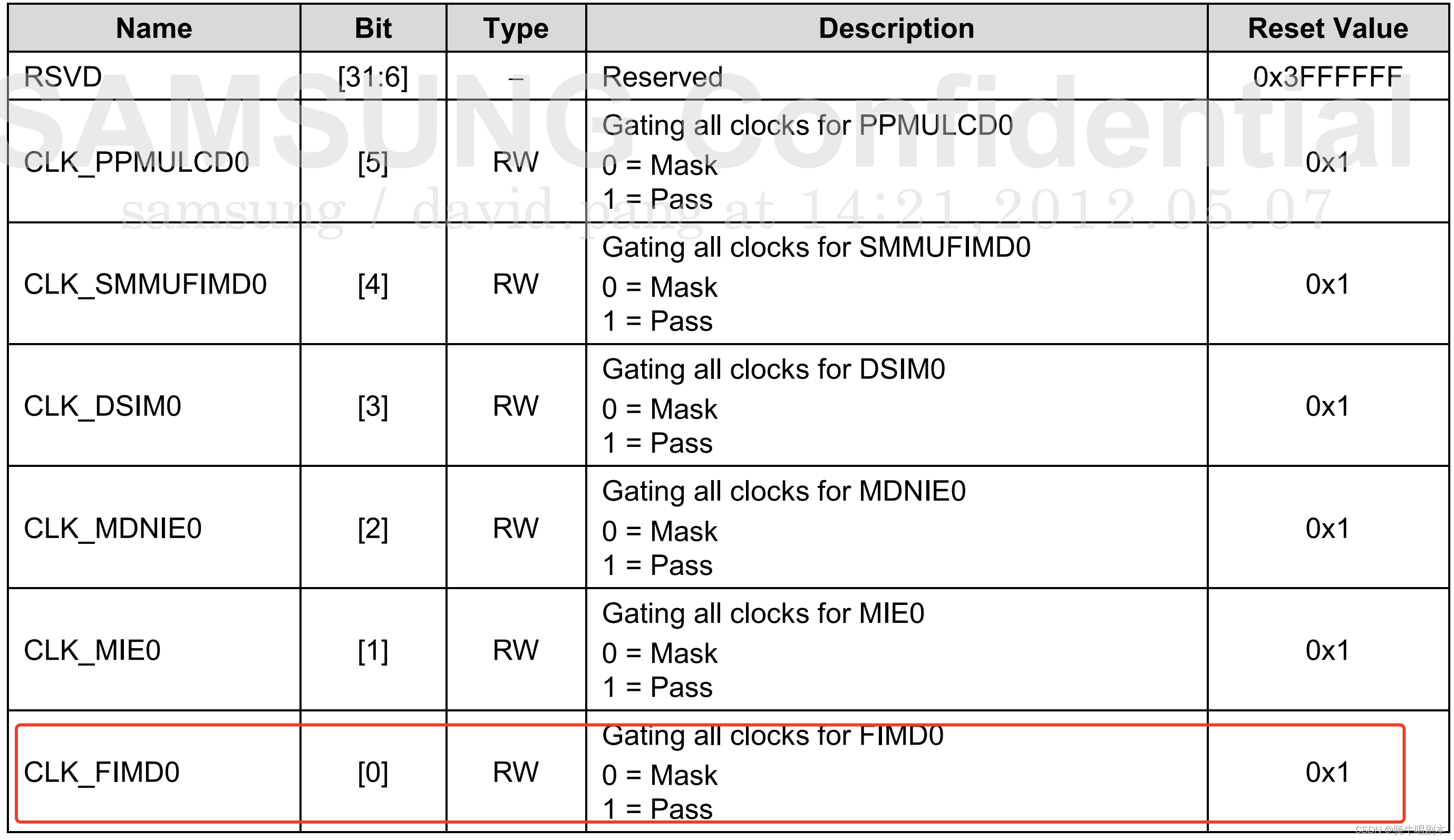
CLK_GATE_IP_LCD (P556)
Base Address: 0x1003_0000
Address = Base Address + 0xC934, Reset Value = 0xFFFF_FFFF
作用:控制LCD BLK的IP时钟门控。设置为1时,表示使能LCD控制器的时钟;设置为0时,表示关闭LCD控制器的时钟。
4.4.2.3 系统寄存器
LCDBLK_CFG (P884)
Base Address: 0x1001_0000
Address = Base Address + 0x0210, Reset Value = 0x00F8_0000
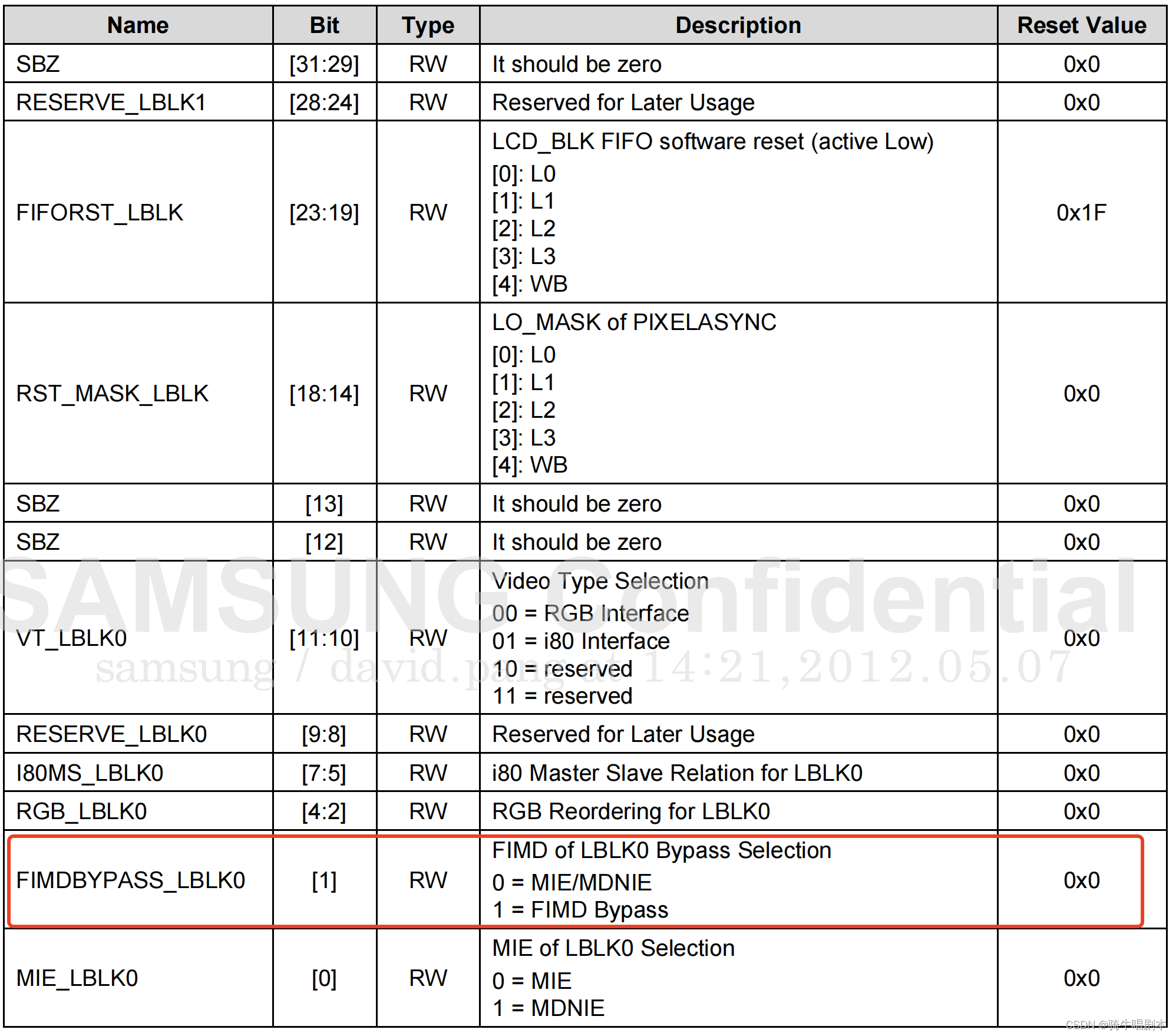
寄存器lcdblk_cfg是Exynos4412芯片中与LCD控制器背光控制相关的寄存器。该寄存器用于配置和控制LCD控制器背光的工作方式和参数。
- fimdbypass_lblk0: 用于配置背光控制是否绕过FIMD(Framebuffer Interface Module Display)模块。设置为1时,表示绕过FIMD模块,背光控制由外部电路或外部控制器进行;设置为0时,表示背光控制由FIMD模块进行。
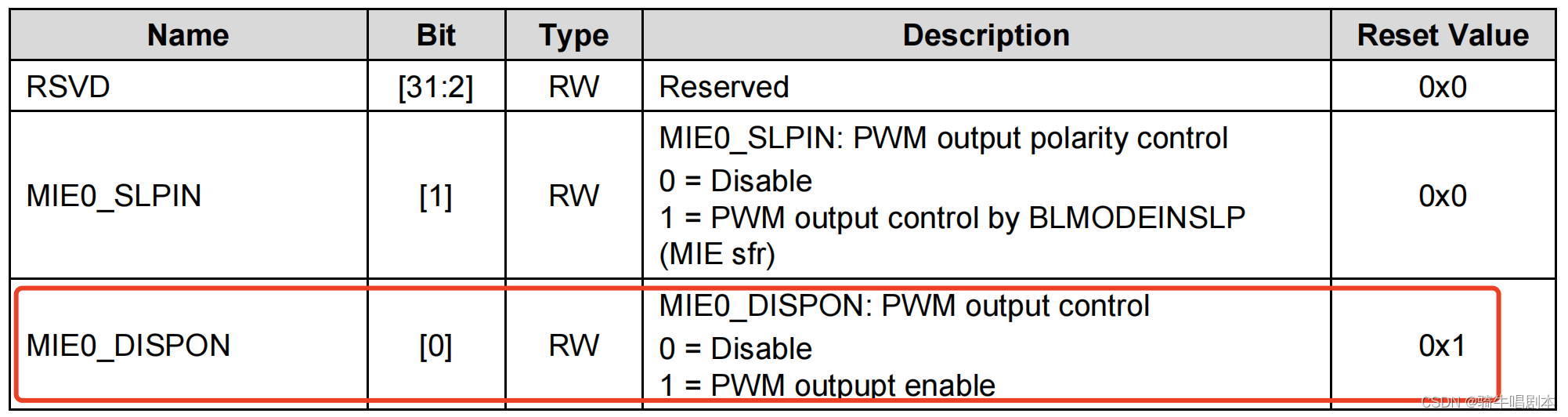
LCDBLK_CFG2 (P886)
Base Address: 0x1001_0000
Address Base Address + 0x0214, Reset Value = 0x0000_0001
4.4.2.4 LCD控制寄存器
VIDCON0 (P1838)
Base Address = 0x11C0_0000
Address = Base Address + 0x0000, Reset Value = 0x0000_0000
VIDCON1 (P1839)
Base Address = 0x11C0_0000
Address = Base Address + 0x0004, Reset Value = 0x0000_0000
VIDTCON0 (P1842)
Base Address = 0x11C0_0000
Address = Base Address + 0x0010, Reset Value = 0x0000_0000
VIDTCON1
Base Address = 0x11C0_0000
Address = Base Address + 0x0014, Reset Value = 0x0000_0000
VIDTCON2 (P1843)
Base Address = 0x11C0_0000
Address = Base Address + 0x0018, Reset Value = 0x0000_0000

VIDTCON3 (P1843)
Base Address = 0x11C0_0000
Address = Base Address + 0x001C, Reset Value = 0x0000_0000
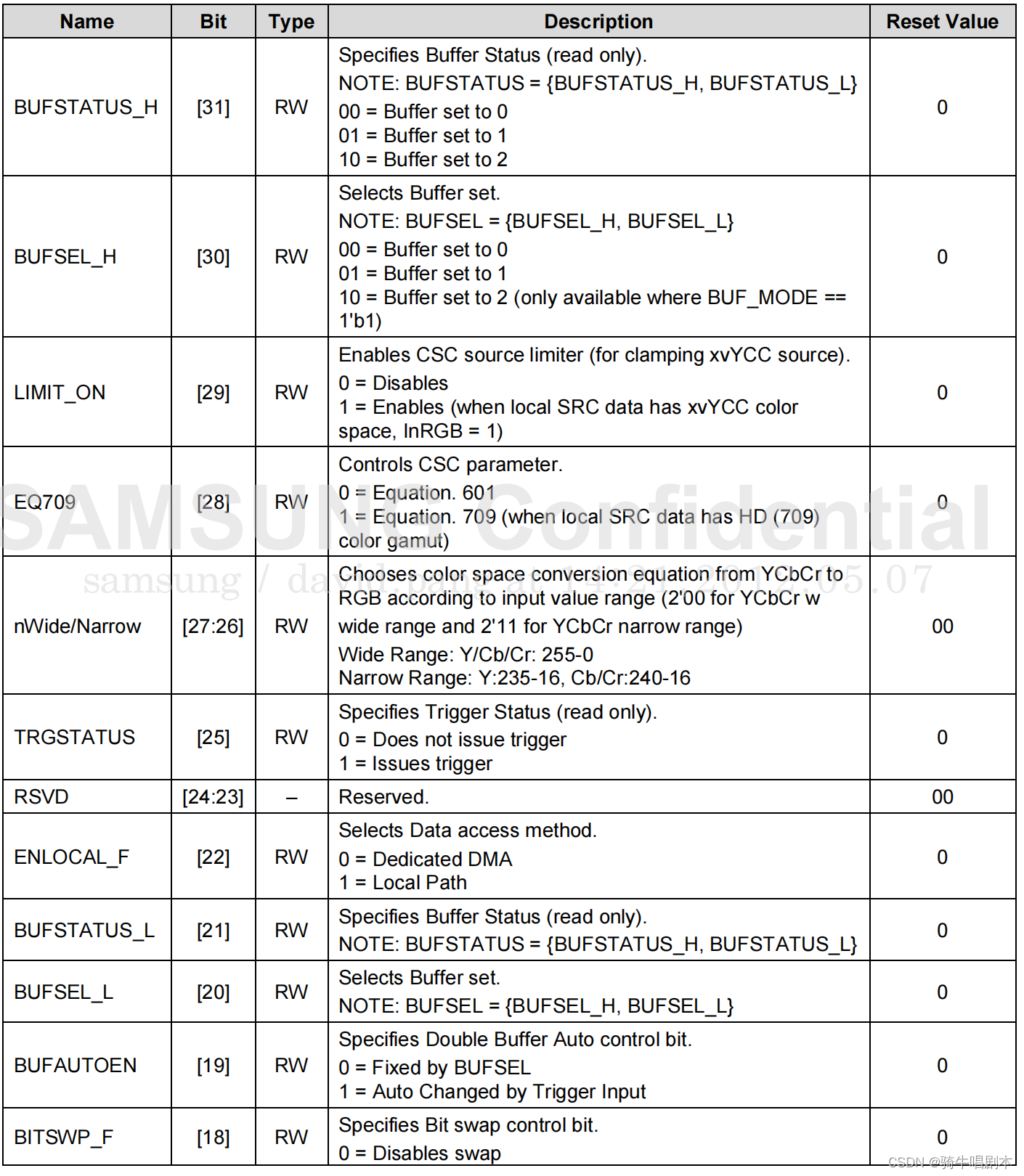
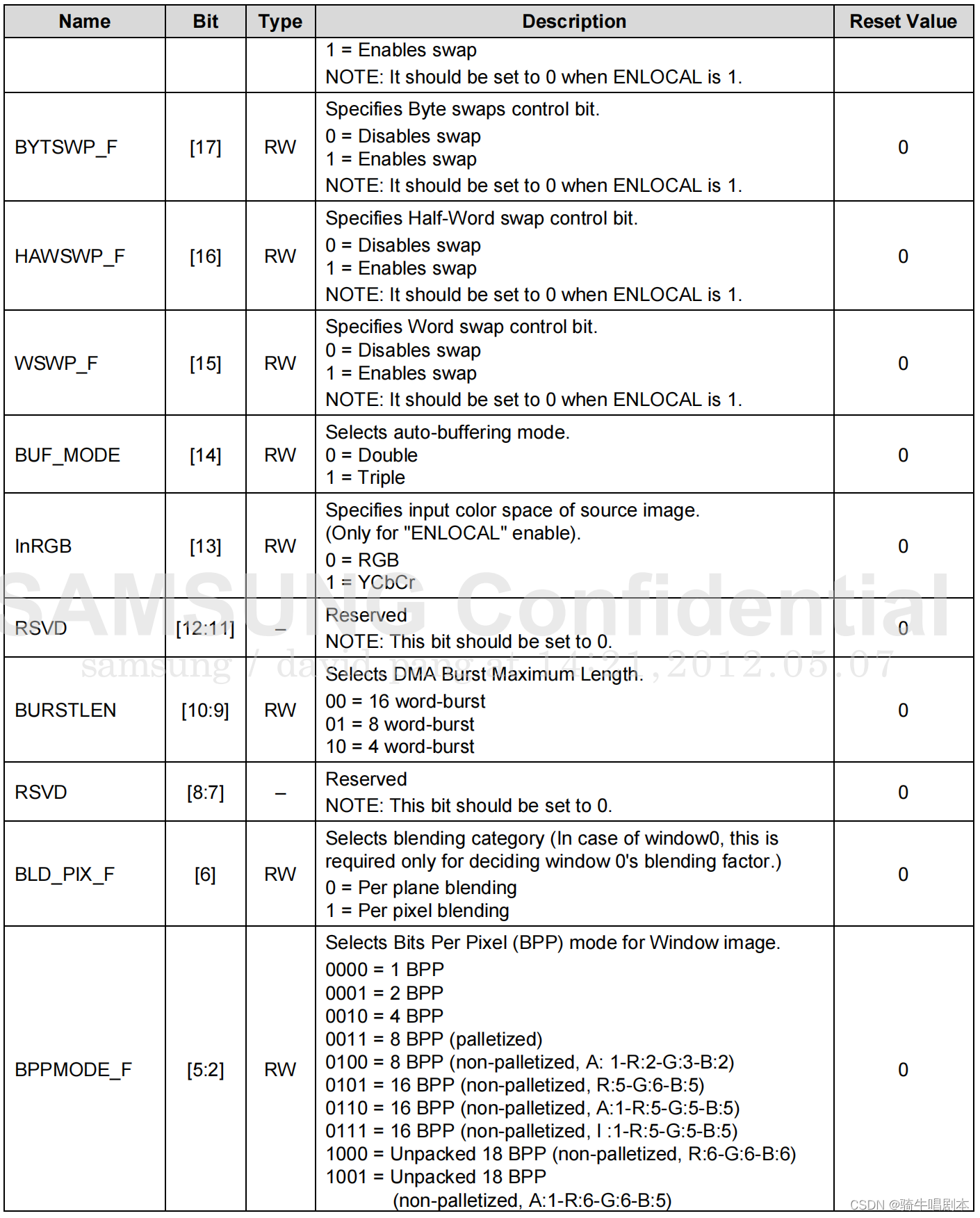
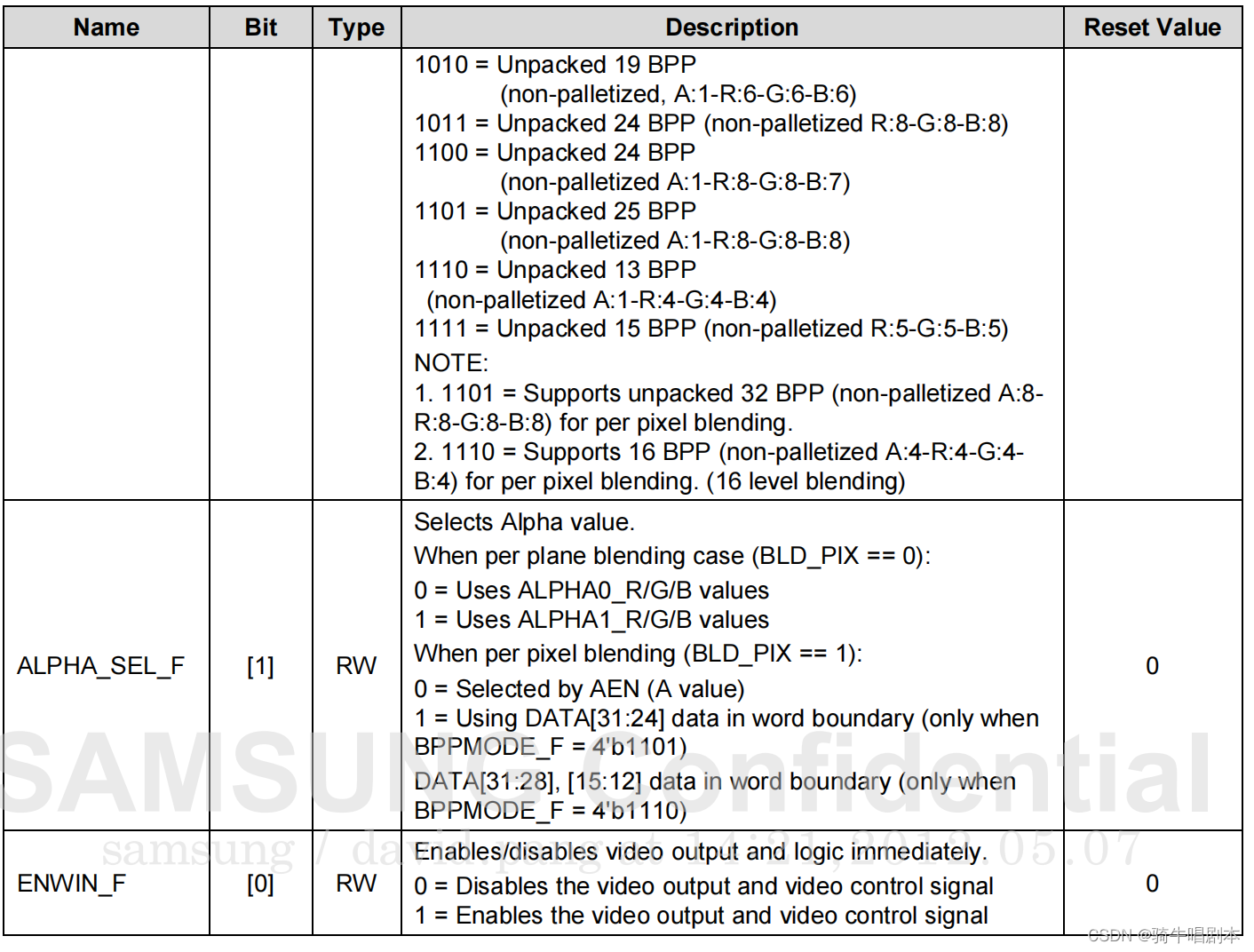
WINCON0 (P1844)
Base Address = 0x11C0_0000
Address = Base Address + 0x0020, Reset Value = 0x0000_0000
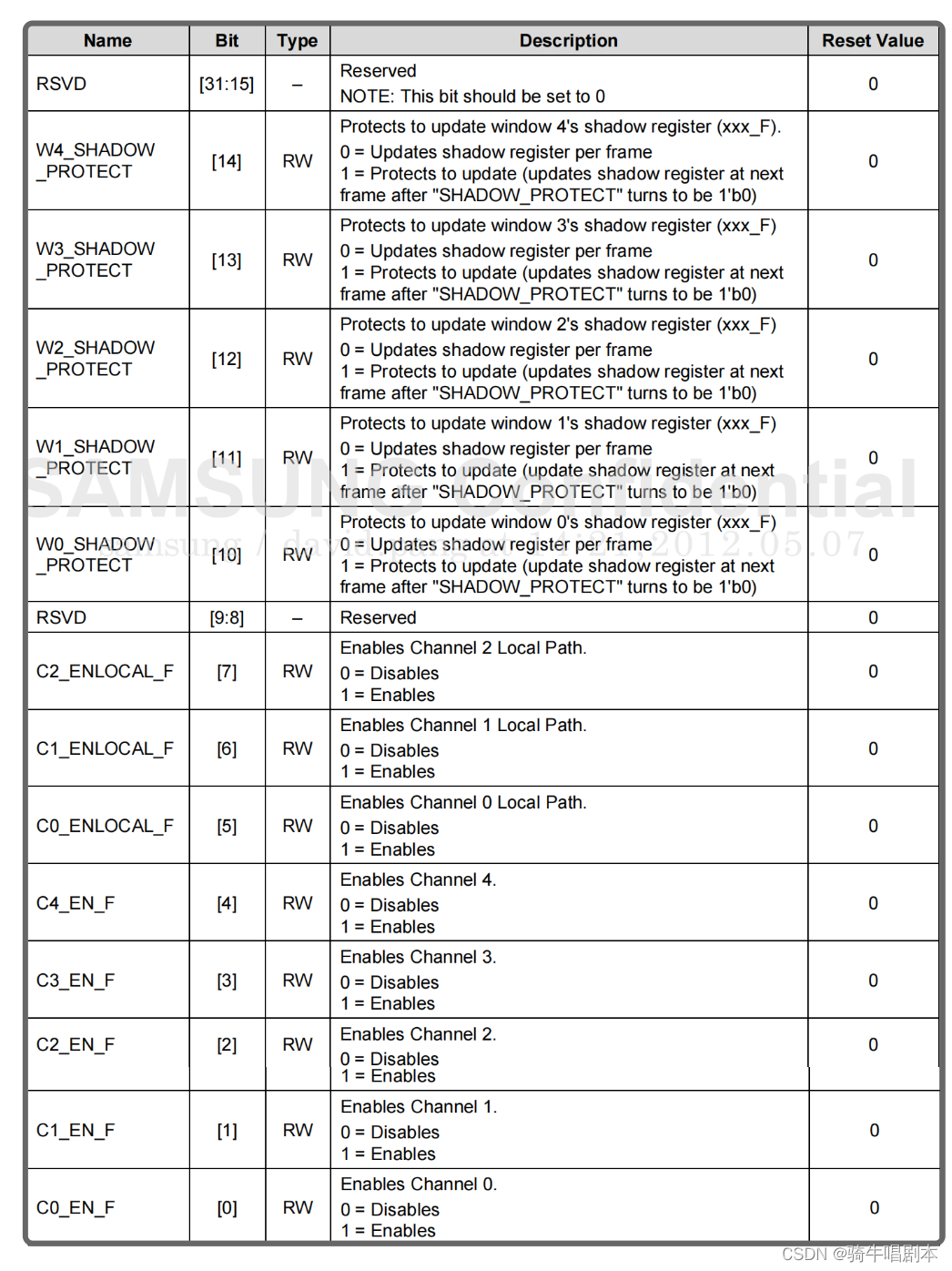
SHADOWCON (P1859)
Base Address = 0x11C0_0000
Address = Base Address + 0x0034, Reset Value = 0x0000_0000
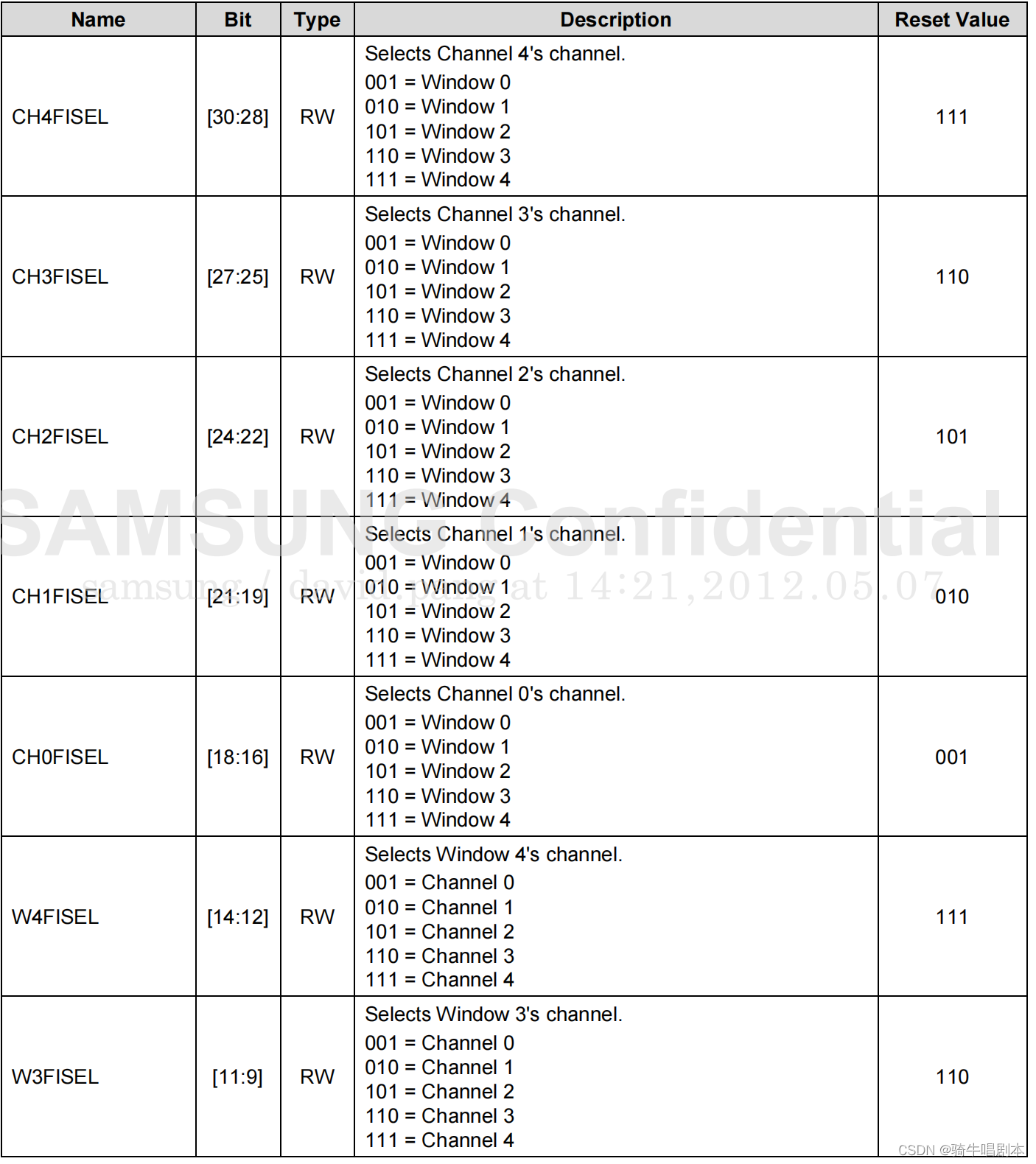
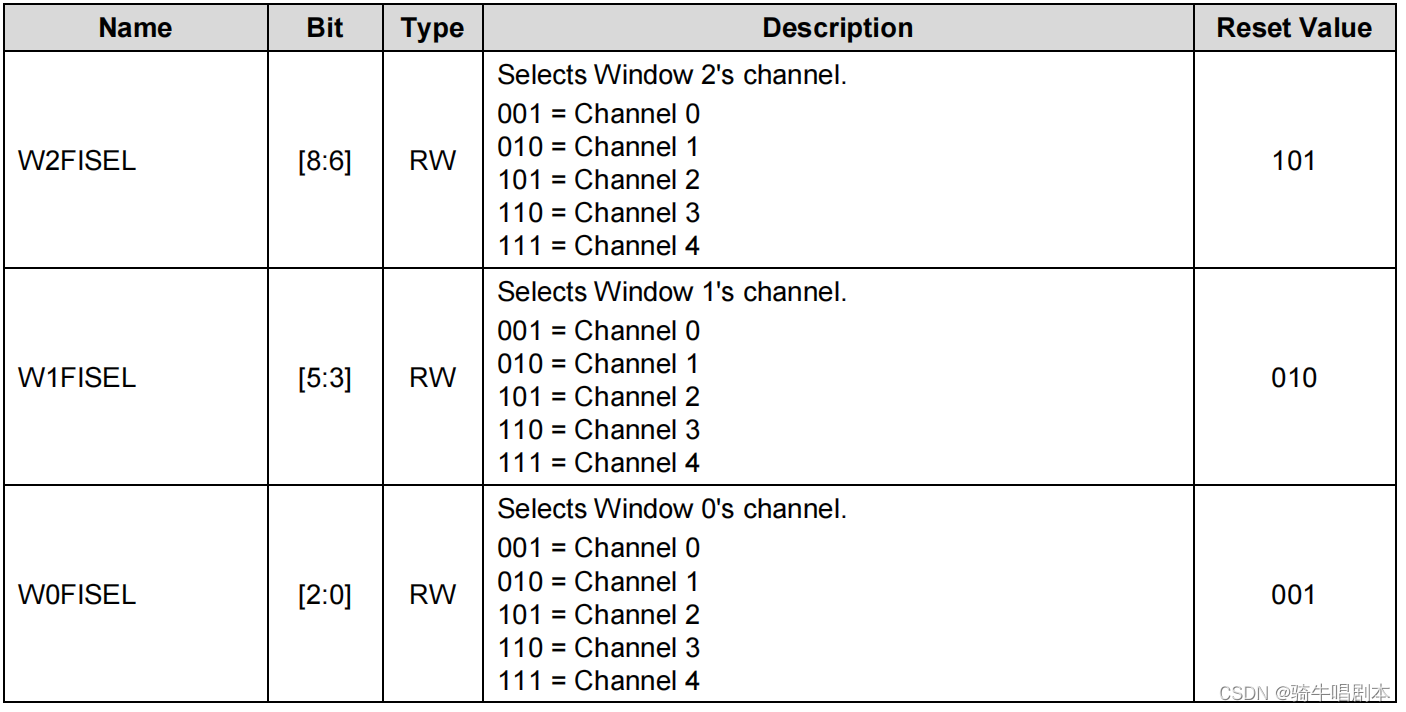
WINCHMAP2
Base Address = 0x11C0_0000
Address = Base Address + 0x003C, Reset Value = 0x7D51_7D51
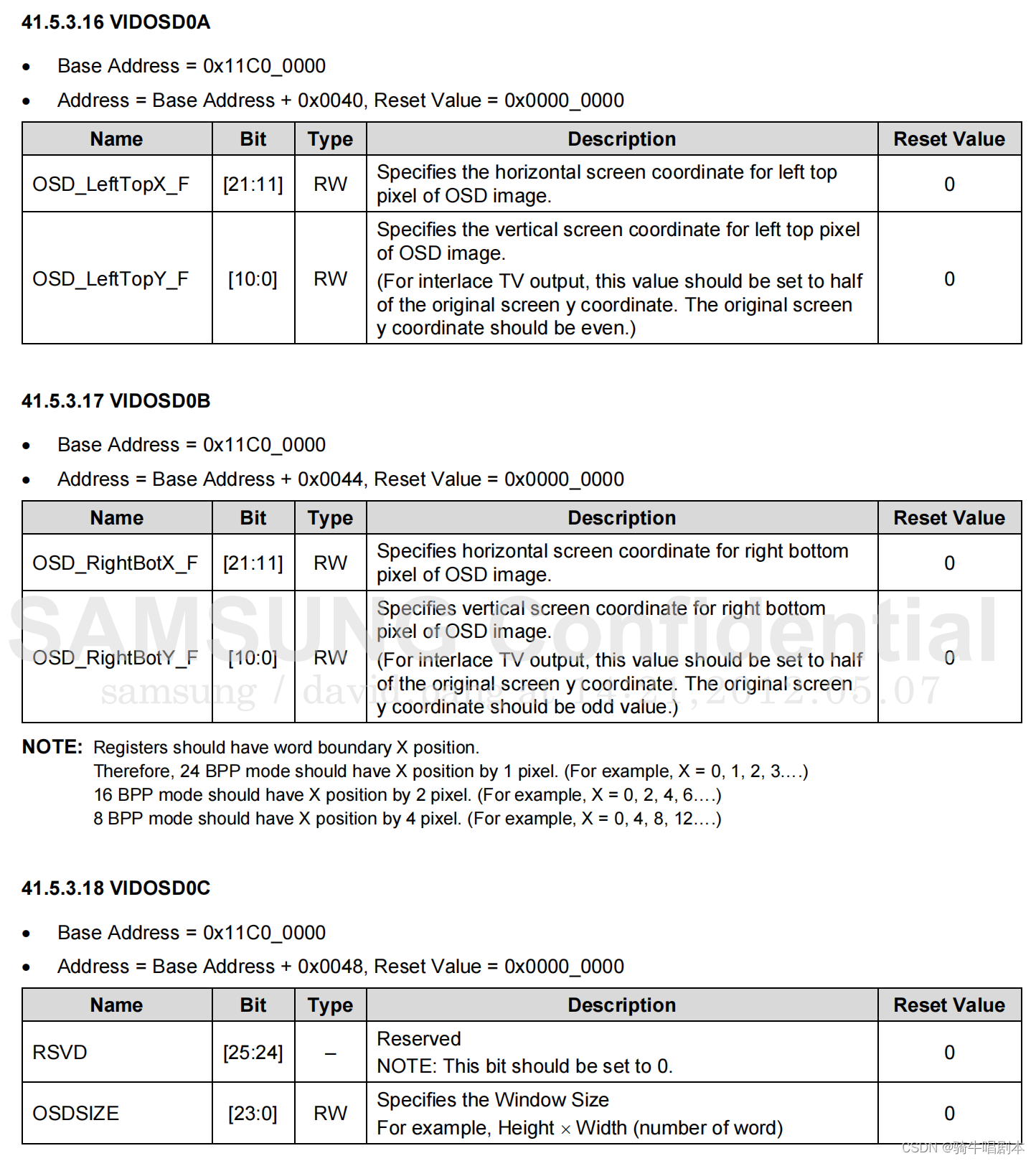
VIDOSD0A VIDOSD0B VIDOSD0C(P1863)
VIDOSD0A:用于配置视频显示层0的位置和大小。通过设置该寄存器的位字段,可以指定视频显示层0在屏幕上的位置和大小。
•
VIDOSD0B:用于配置视频显示层0的颜色控制。通过设置该寄存器的位字段,可以调整视频显示层0的颜色属性,例如亮度、对比度、饱和度等。
•
VIDOSD0C:用于配置视频显示层0的混合模式和透明度。通过设置该寄存器的位字段,可以指定视频显示层0的混合模式(例如覆盖、叠加等)以及透明度。
这些寄存器的区别在于它们分别用于配置视频显示层的不同方面。VIDOSD0A用于配置位置和大小,VIDOSD0B用于配置颜色控制,VIDOSD0C用于配置混合模式和透明度。
4.4.2.5 电源管理寄存器
9 LCD0_CONFIGURATION
Base Address: 0x1002_0000
Address = Base Address + 0x3C80, Reset Value = 0x0000_0007
作用:配置LCD0的电源模式

5、结语
\qquad 到此,有了以上的知识准备,接下来就可以开始进行LCD驱动程序的开发了。在下一篇中,我们将讲述linux3.14中的LCD驱动的FrameBuffer框架相关内容。


![SSM(Vue3+ElementPlus+Axios+SSM前后端分离)--功能实现[五]](https://img-blog.csdnimg.cn/img_convert/03f3626d0f23d9487a6dbe9c6ade6cda.png)