准备工作
UNICO-GUI软件用于意法半导体产品组合(加速度计、陀螺仪、磁力计和环境传感器)中所有MEMS传感器的评估板。它可用于Linux(基于Debian) / Mac OS X / Windows平台。
Unico-GUI - MEMS evaluation kit software package for Linux, Mac OSX and Windows - 意法半导体STMicroelectronics
用这个软件的前提是需要有一个专用的传感器评估板,比如STEVAL-MKI109V3(STEVAL-MKI109V3 - 专业MEMS工具:基于STM32F401VE并与所有ST MEMS适配器兼容的ST MEMS适配器主板 - 意法半导体STMicroelectronics),如下图:

还需要一个适配板,比如 STEVAL-MKI227KA(STEVAL-MKI227KA - 3-axis accelerometer and 3-axis gyroscope kit with QVAR functionality based on LSM6DSV16X - 意法半导体STMicroelectronics),如下图:

适配板其实就是一个传感器的扩展板,插到评估板上即可。
然后通过USB和PC相连,打开安装好的UNICO-GUI软件:
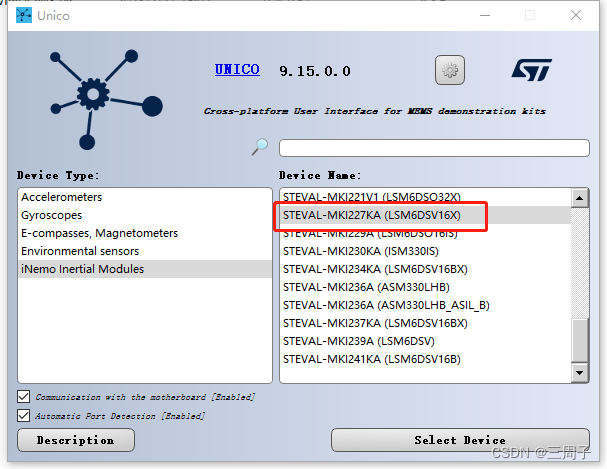
选择STEVAL-MKI227KA(LSM6DSV16X),点击Select Device。
如果板子已经连接好了,顺利的话,可以进入下面的界面:

如果不能顺利进入上面的界面,那么要么板子没连接好,要么Firmware Version版本不对,Firmware Version版本不对的话,需要对评估板进行固件的更新,在你下面的软件包里面,存在一个en.en.stsw-mki109w\Unico-GUI_v9.14.6_WINDOWS\FIRMWARE\ProfiMEMSTool board目录,里面有最新的固件;

通过说明文档,可以或者如何烧录固件的信息,里面还有相关驱动安装的说明,但个人推荐用STM32CubeProgrammer烧录,比较方便:
um2116-stevalmki109v3-professional-mems-tool-motherboard-for-mems-adapter-boards-stmicroelectronics.pdf
Unico-GUI这个软件基本把一款传感器的家底全部翻了出来,你可以通过很多图形化的工具对传感器进行评估。重在实践,这里不一一展开了,只对机器学习这一部分做一个操作的说明。
机器学习(MLC)的操作
ST传感器的机器学习的原理不想多说,可以参考如下文档,文档也对本文要说这个这个传感器做了详细的MLC说明:
an5804-lsm6dsv16x-machine-learning-core-stmicroelectronics.pdf
下面说说基于lsm6dsv16x这个传感器MLC的操作步骤:
1.捕获数据
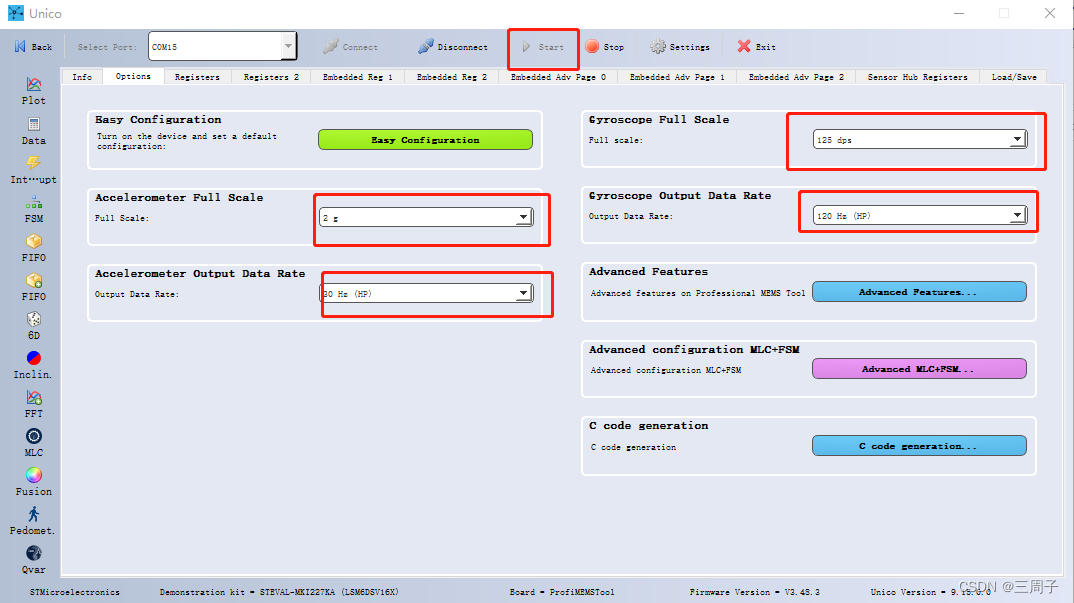
Unico-GUI的Options需要做如下配置:
加速度满量程和输出数据速率,陀螺仪满量程和输出数据速率(如果用到陀螺仪才需要设置),确保Start按钮已经按下。这些条件缺一不可。
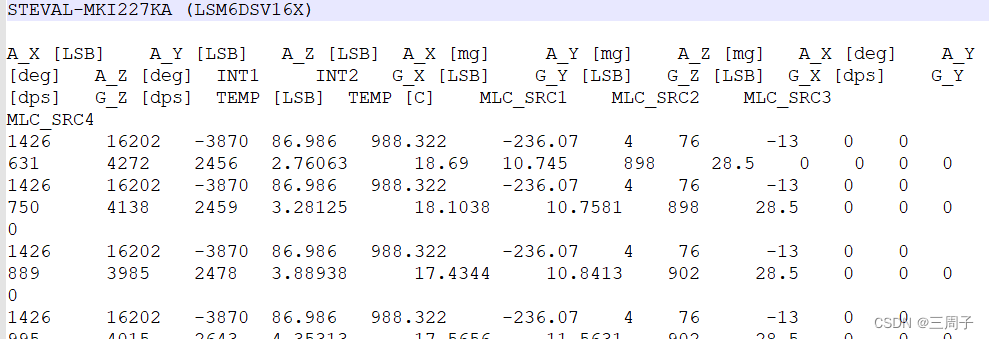
然后点击Load/Save选项卡,在保存数据这里选择保存的路径,点击需要采集的数据,然后点击Start开始采集,点击Stop结束采集。
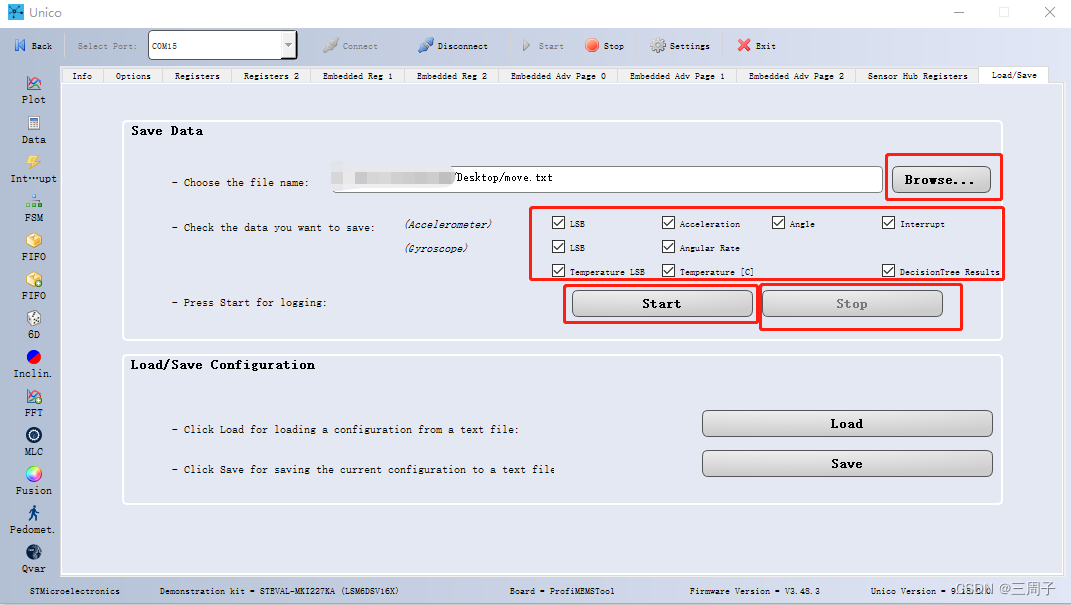
这里简单采集一个move.txt,表示运动,stop.txt表示停止运动的数据。
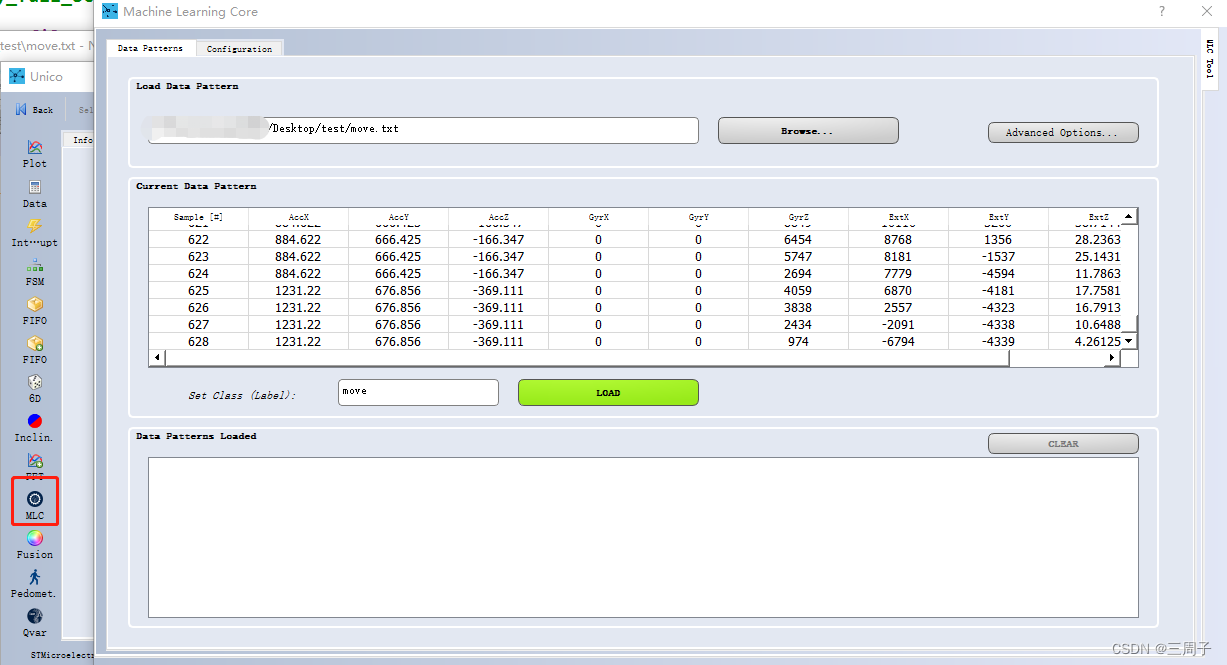
2.标记数据
点击MLC按钮,弹出新的界面,在Load Data Pattern中点击Browse,选择刚才采集到的一个数据,在Set Class数据标记,这里先填一个move,然后点击LOAD。
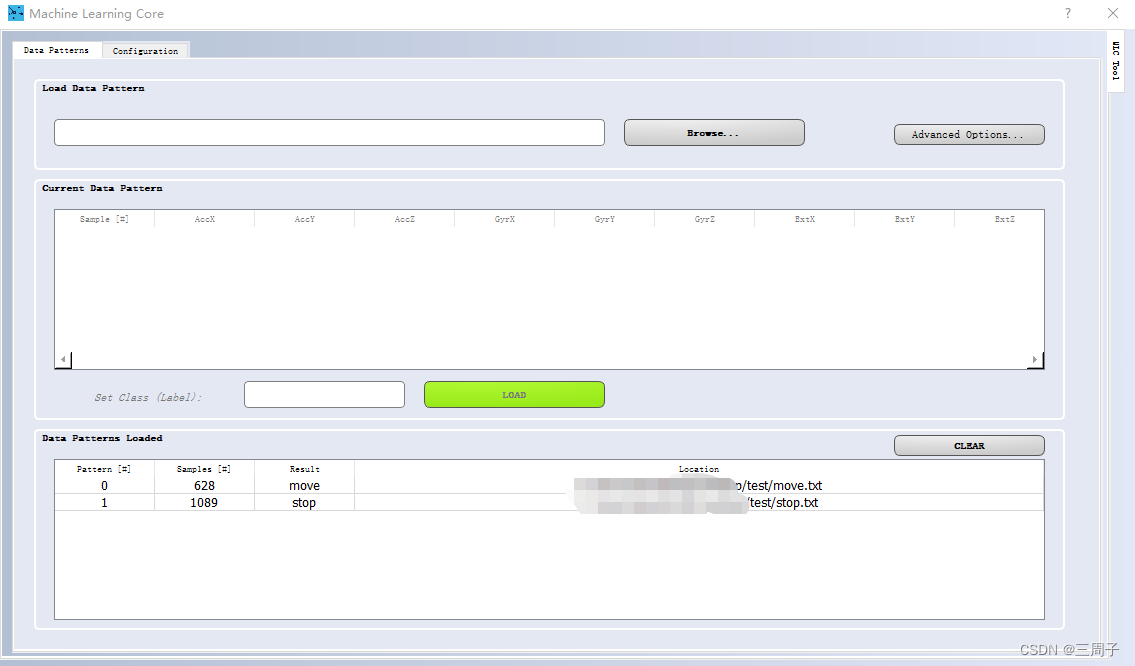
依次顺序再添加stop数据,如下:
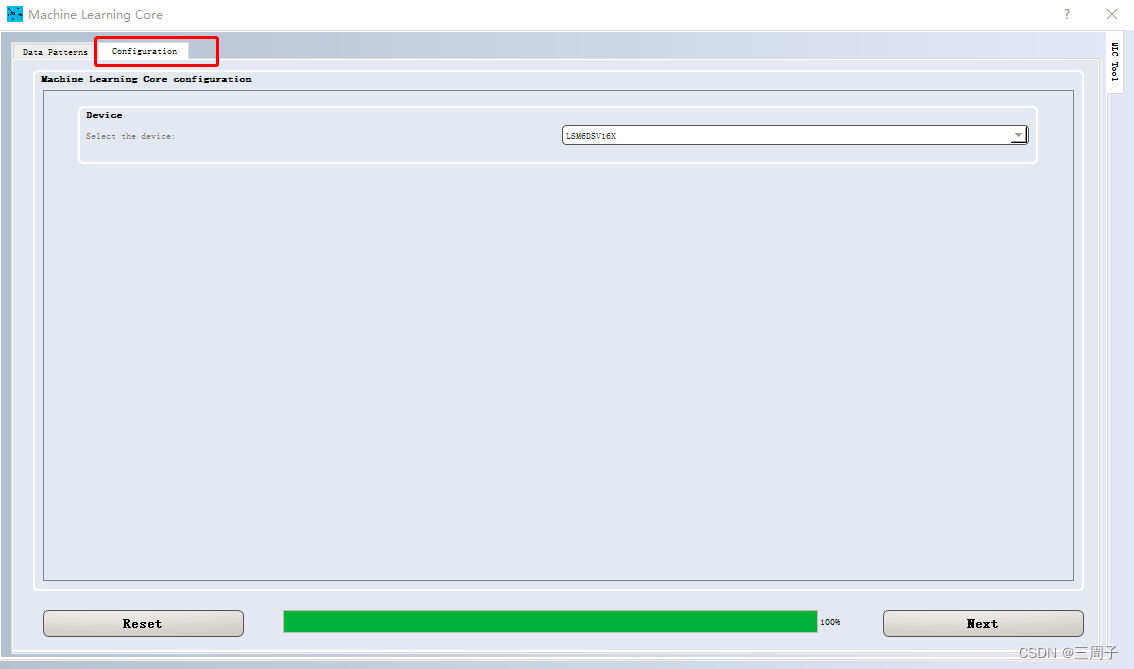
3.构建决策树
点击Configuration选项卡,开始构建决策树。
点击下一步,选择Machine Learning Core ODR,机器学习输出的速率,这个根据需要做修改。然后点击下一步。

下面的页面选择输入的数据类型,是只有加速度,还是加速度+陀螺仪,还是加速度+外部传感器等各种数据类型,并设置Full scale, ODR。然后点击下一步。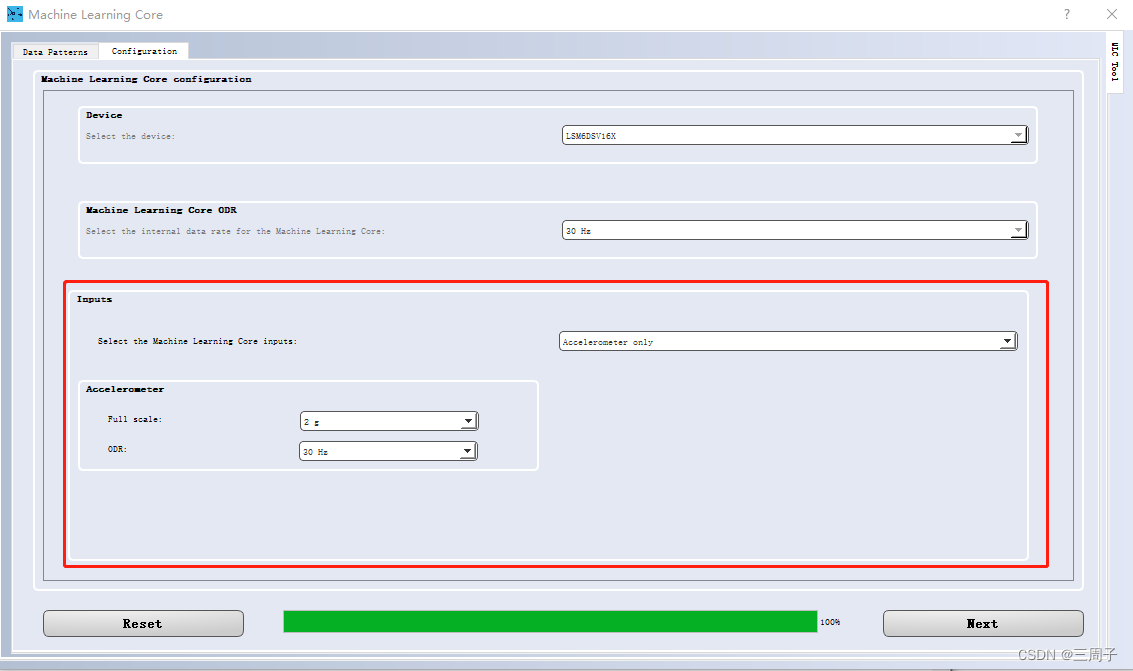
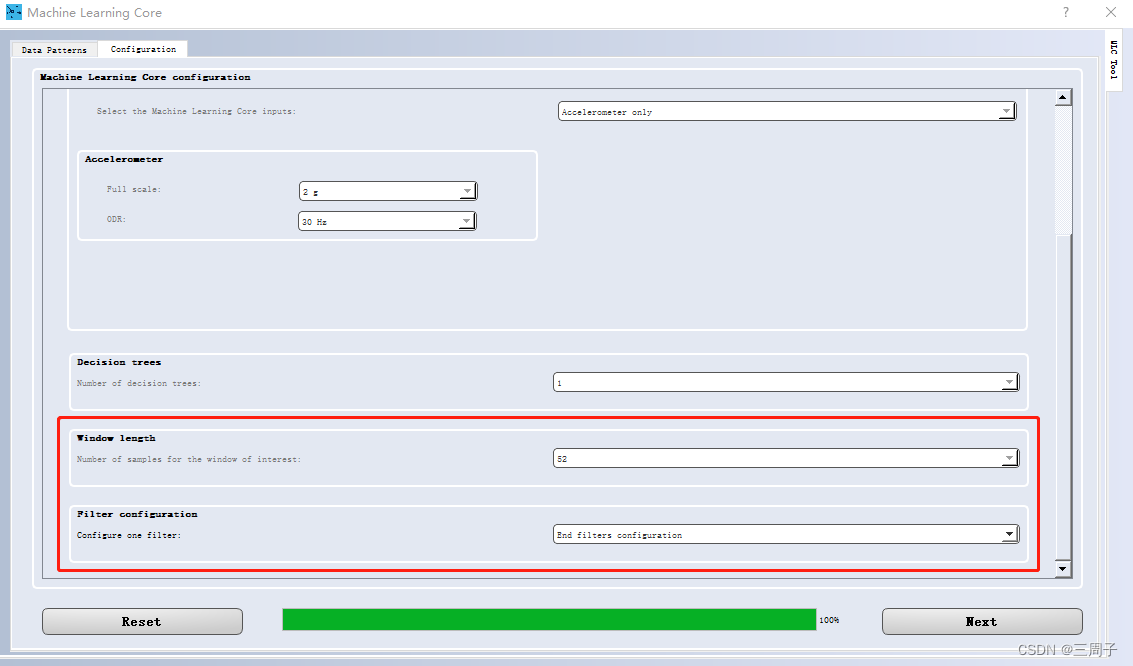
如下图,选择决策树的数量,有1-4可以选择。

下面是感兴趣窗口数和滤波器的设置:
下面是特征值的选取,有
均值
方差
能量
峰峰值
过零信号
正过零信号
负过零信号
峰值探测器
正峰值探测器
负峰值探测器
最小值
最大值
递归均值
递归 RMS
递归方差
递归最大值
递归最小值
递归峰峰值
各种特征值需要根据处理的数据特点去做取舍,这估计也是训练出来是否准确可用的一个重要选项。需要下功夫研究。
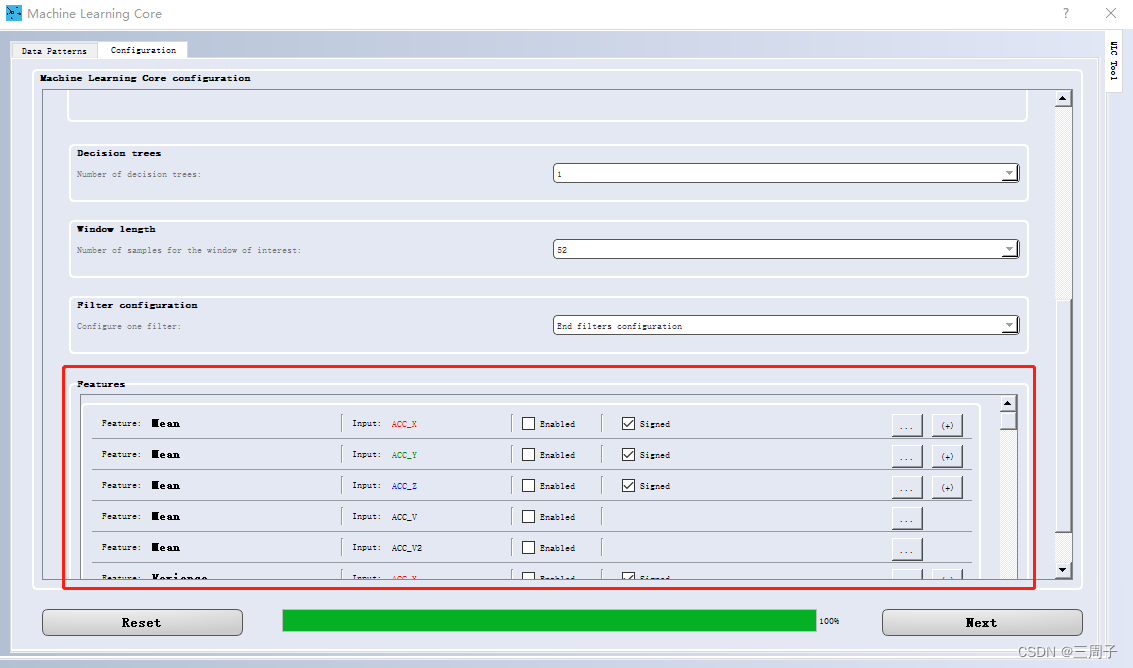
我们这里选择一个方差 模即可。
![]()
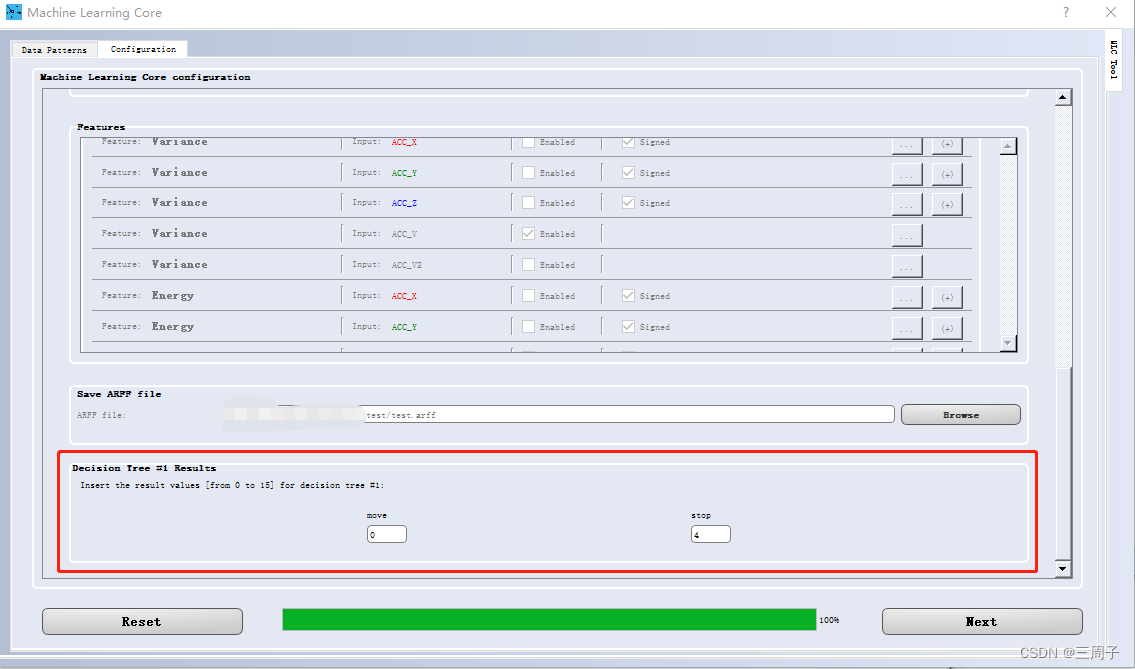
如下保存ARFF文件,选择一个路径即可;

如下,选择上报的结果,0表示运动,4表示禁止,一共有0-15个值可以选择。
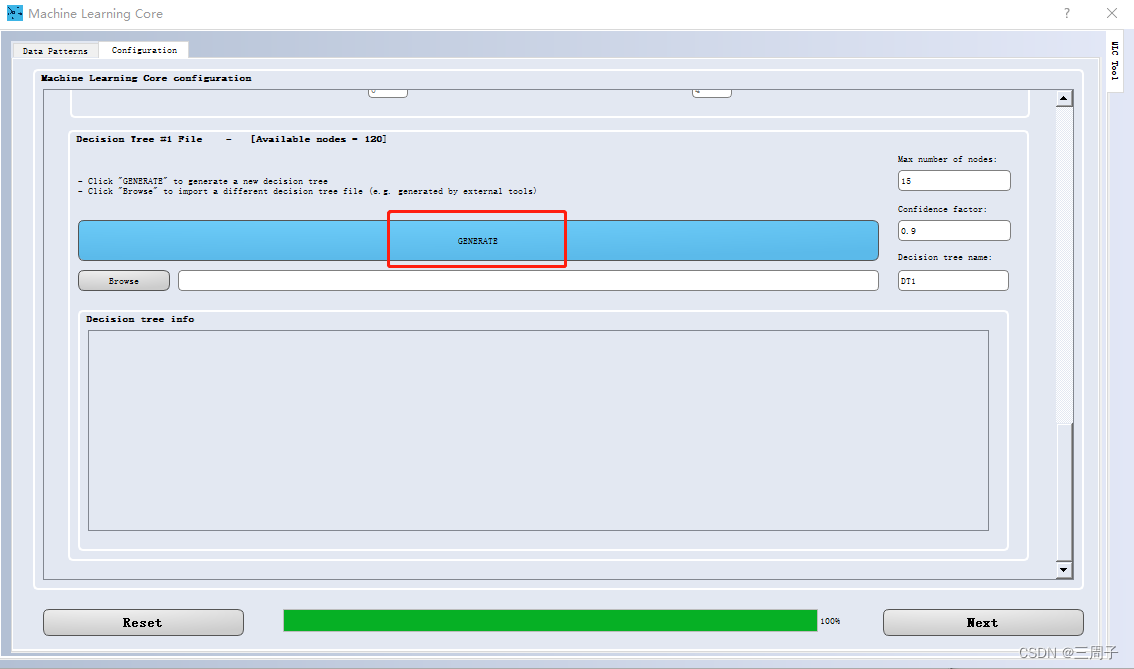
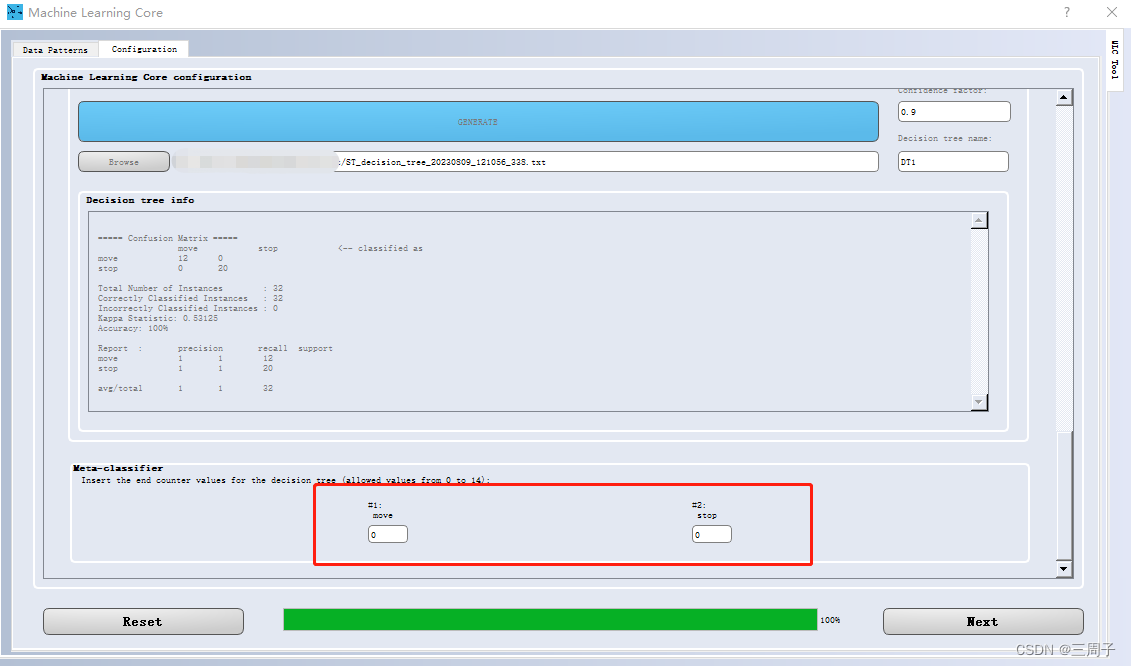
如下点击Generate,生成决策树。
如下,选择误报的容差值,0表示触发即产生中断,如果是1,则表示检测到2次动作之后才上报。共有0-14个选择。
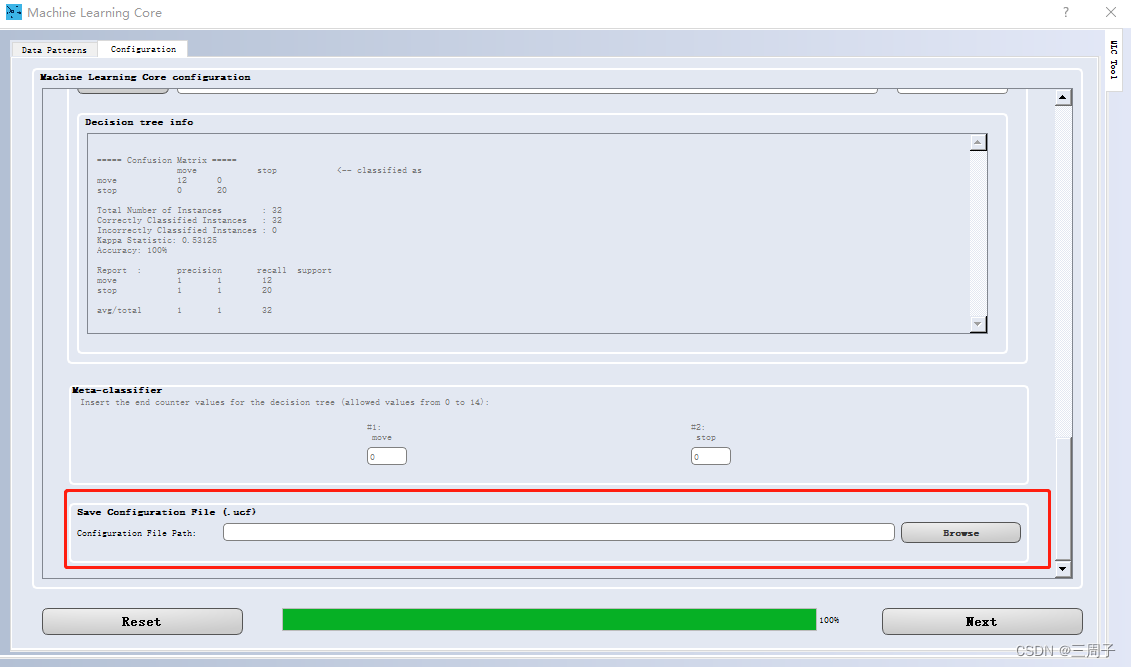
最后选择ucf文件的保存路径,也就是最终的结果。
4.内置决策树
如上点击Next之后,把无关窗口关闭之后,回到主界面的Load/Save,点击Load,把ucf文件加载到传感器中,其实本质就是写入寄存器。

5. 处理新数据
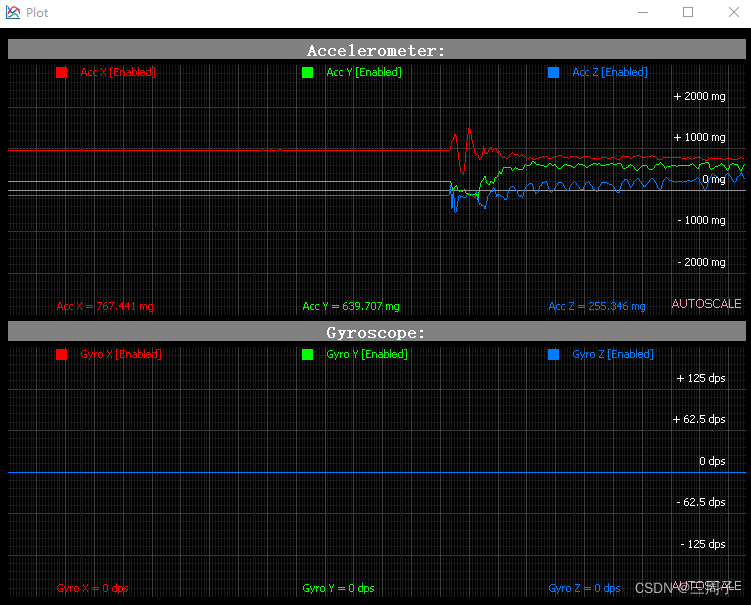
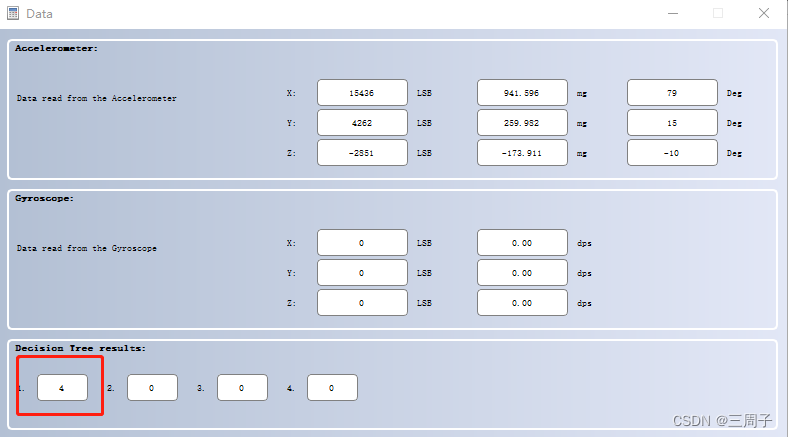
点击Start,Plot, Data.开始观察。

Plot显示数据的曲线图
Data则显示决策树输出结果,我们这里用到1个决策树,所以看1这里数据在0,4之间进行变化。
以上已经完成了一次简单机器学习过程。
机器学习的使用
完成了上面的步骤之后,我们如何在代码里面去运用这些东西呢?
中断
机器学习会产生中断,通过中断脚输出;如下图,可以看见运动时,输出一个中断,禁止时也输出一个中断。

结果的读取
结果可以通过寄存器来读取,MLCx_SRC这4个寄存器可以读出结果。

代码需要写入什么?
代码其实只要给传感器写入寄存器的值就可以了。
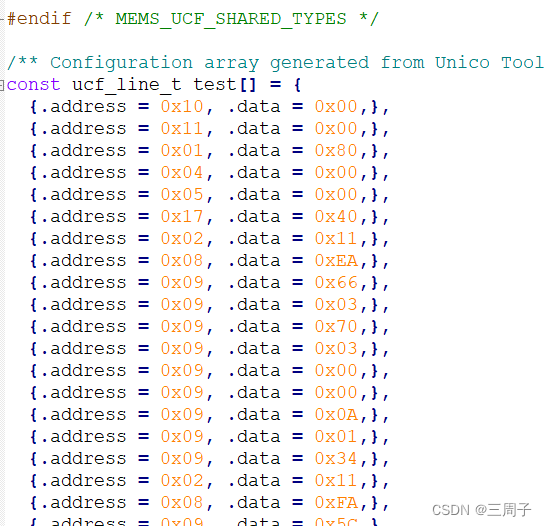
寄存器有哪些值需要写入?就是ucf文件里面展示的寄存器值。

ucf不太直观,如何转化为C语言代码?
通过Unico-GUI的C code generation按钮进行转换。
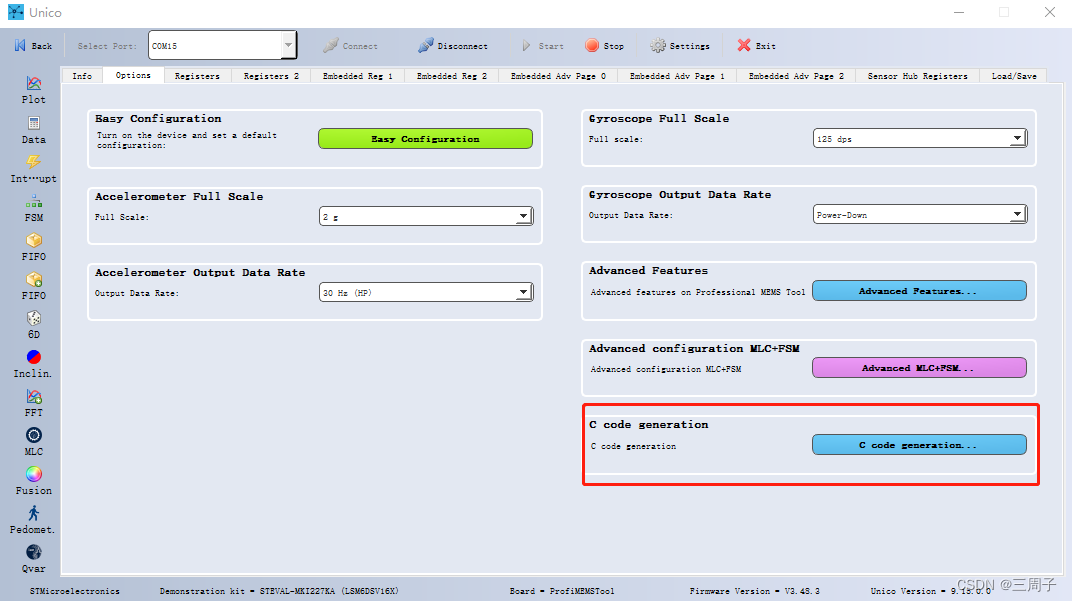
最终生成:
然后你就可以嵌入你的代码中,完成机器学习的功能。