pwm
pwm应用程序开发
访问 PWM 设备API
应用程序通过 RT-Thread 提供的 PWM 设备管理接口来访问 PWM 设备硬件,相关接口如下所示:
| 函数 | 描述 |
|---|---|
| rt_device_find() | 根据 PWM 设备名称查找设备获取设备句柄 |
| rt_pwm_set() | 设置 PWM 周期和脉冲宽度 |
| rt_pwm_enable() | 使能 PWM 设备 |
| rt_pwm_disable() | 关闭 PWM 设备 |
查找 PWM 设备
应用程序根据 PWM 设备名称获取设备句柄,进而可以操作 PWM 设备,查找设备函数如下所示:
rt_device_t rt_device_find(const char* name);
| 参数 | 描述 |
|---|---|
| name | 设备名称 |
| 返回 | —— |
| 设备句柄 | 查找到对应设备将返回相应的设备句柄 |
| RT_NULL | 没有找到设备 |
一般情况下,注册到系统的 PWM 设备名称为 pwm0,pwm1等,使用示例如下所示:
#define PWM_DEV_NAME "pwm3" /* PWM 设备名称 */
struct rt_device_pwm *pwm_dev; /* PWM 设备句柄 */
/* 查找设备 */
pwm_dev = (struct rt_device_pwm *)rt_device_find(PWM_DEV_NAME);
设置 PWM 周期和脉冲宽度
通过如下函数设置 PWM 周期和占空比:
rt_err_t rt_pwm_set(struct rt_device_pwm *device,int channel,rt_uint32_t period,rt_uint32_t pulse);
| 参数 | 描述 |
|---|---|
| device | PWM 设备句柄 |
| channel | PWM 通道 |
| period | PWM 周期时间 (单位纳秒 ns) |
| pulse | PWM 脉冲宽度时间 (单位纳秒 ns) |
| 返回 | —— |
| RT_EOK | 成功 |
| -RT_EIO | device 为空 |
| -RT_ENOSYS | 设备操作方法为空 |
| 其他错误码 | 执行失败 |
PWM 的通道 channel 可为正数或者负数。因为有的芯片的PWM是具有互补输出功能的,即PWM的某一个通道是可以靠两个引脚来发出一对互补的波形。当通道号为正数的时候,代表使用PWM的正常输出波形引脚;为其负数的时候,代表使用PWM的互补输出波形引脚。
使用示例如下所示:
#define PWM_DEV_CHANNEL 1 /* PWM通道的CH1引脚 */
#define PWM_DEV_CHANNEL -1 /* PWM通道的CH1N引脚 */
PWM 的输出频率由周期时间 period 决定,例如周期时间为 0.5ms (毫秒),则 period 值为 500000ns(纳秒),输出频率为 2KHz,占空比为 pulse / period,pulse 值不能超过 period。
使用示例如下所示:
#define PWM_DEV_NAME "pwm3" /* PWM设备名称 */
#define PWM_DEV_CHANNEL 4 /* PWM通道 */
struct rt_device_pwm *pwm_dev; /* PWM设备句柄 */
rt_uint32_t period, pulse;period = 500000; /* 周期为0.5ms,单位为纳秒ns */
pulse = 0; /* PWM脉冲宽度值,单位为纳秒ns */
/* 查找设备 */
pwm_dev = (struct rt_device_pwm *)rt_device_find(PWM_DEV_NAME);
/* 设置PWM周期和脉冲宽度 */
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
使能 PWM 设备
设置好 PWM 周期和脉冲宽度后就可以通过如下函数使能 PWM 设备:
rt_err_t rt_pwm_enable(struct rt_device_pwm *device, int channel);
| 参数 | 描述 |
|---|---|
| device | PWM 设备句柄 |
| channel | PWM 通道 -channel代表互补通道 |
| 返回 | —— |
| RT_EOK | 设备使能成功 |
| -RT_ENOSYS | 设备操作方法为空 |
| 其他错误码 | 设备使能失败 |
[!NOTE] 注:这个函数并不会使能PWM互补输出的两个引脚,只能使能其中的某一个引脚(CHx或者CHxN)。
使用示例如下所示:
#define PWM_DEV_NAME "pwm3" /* PWM设备名称 */
#define PWM_DEV_CHANNEL 4 /* PWM通道 */
struct rt_device_pwm *pwm_dev; /* PWM设备句柄 */
rt_uint32_t period, pulse;period = 500000; /* 周期为0.5ms,单位为纳秒ns */
pulse = 0; /* PWM脉冲宽度值,单位为纳秒ns */
/* 查找设备 */
pwm_dev = (struct rt_device_pwm *)rt_device_find(PWM_DEV_NAME);
/* 设置PWM周期和脉冲宽度 */
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
/* 使能设备 */
rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL);
关闭 PWM 设备通道
通过如下函数关闭 PWM 设备对应通道。
rt_err_t rt_pwm_disable(struct rt_device_pwm *device, int channel);
| 参数 | 描述 |
|---|---|
| device | PWM 设备句柄 |
| channel | PWM 通道 |
| 返回 | —— |
| RT_EOK | 设备关闭成功 |
| -RT_EIO | 设备句柄为空 |
| 其他错误码 | 设备关闭失败 |
[!NOTE] 注:这个函数并不会同时失能PWM互补输出的两个引脚,只能失能其中的某一个引脚(CHx或者CHxN)。
使用示例如下所示:
#define PWM_DEV_NAME "pwm3" /* PWM设备名称 */
#define PWM_DEV_CHANNEL 4 /* PWM通道 */
struct rt_device_pwm *pwm_dev; /* PWM设备句柄 */
rt_uint32_t period, pulse;period = 500000; /* 周期为0.5ms,单位为纳秒ns */
pulse = 0; /* PWM脉冲宽度值,单位为纳秒ns */
/* 查找设备 */
pwm_dev = (struct rt_device_pwm *)rt_device_find(PWM_DEV_NAME);
/* 设置PWM周期和脉冲宽度 */
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
/* 使能设备 */
rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL);
/* 关闭设备通道 */
rt_pwm_disable(pwm_dev,PWM_DEV_CHANNEL);
FinSH 命令
设置 PWM 设备的某个通道的周期和占空比可使用命令pwm_set pwm1 1 500000 5000,第一个参数为命令,第二个参数为 PWM 设备名称,第 3 个参数为 PWM 通道,第 4 个参数为周期(单位纳秒),第 5 个参数为脉冲宽度(单位纳秒)。
msh />pwm_set pwm1 1 500000 5000
msh />
使能 PWM 设备的某个通道可使用命令pwm_enable pwm1 1,第一个参数为命令,第二个参数为 PWM 设备名称,第 3 个参数为 PWM 通道。
msh />pwm_enable pwm1 1
msh />
关闭 PWM 设备的某个通道可使用命令pwm_disable pwm1 1,第一个参数为命令,第二个参数为 PWM 设备名称,第 3 个参数为 PWM 通道。
msh />pwm_disable pwm1 1
msh />
PWM 设备使用示例
PWM 设备的具体使用方式可以参考如下示例代码,示例代码的主要步骤如下:
- 查找 PWM 设备获取设备句柄。
- 设置 PWM 周期和脉冲宽度。
- 使能 PWM 设备。
- while 循环里每 50 毫秒修改一次脉冲宽度。
- 将 PWM通道对应引脚和 LED 对应引脚相连,可以看到 LED 不停的由暗变到亮,然后又从亮变到暗。
/** 程序清单:这是一个 PWM 设备使用例程* 例程导出了 pwm_led_sample 命令到控制终端* 命令调用格式:pwm_led_sample* 程序功能:通过 PWM 设备控制 LED 灯的亮度,可以看到LED不停的由暗变到亮,然后又从亮变到暗。
*/#include <rtthread.h>
#include <rtdevice.h>#define PWM_DEV_NAME "pwm3" /* PWM设备名称 */
#define PWM_DEV_CHANNEL 4 /* PWM通道 */struct rt_device_pwm *pwm_dev; /* PWM设备句柄 */static int pwm_led_sample(int argc, char *argv[])
{rt_uint32_t period, pulse, dir;period = 500000; /* 周期为0.5ms,单位为纳秒ns */dir = 1; /* PWM脉冲宽度值的增减方向 */pulse = 0; /* PWM脉冲宽度值,单位为纳秒ns *//* 查找设备 */pwm_dev = (struct rt_device_pwm *)rt_device_find(PWM_DEV_NAME);if (pwm_dev == RT_NULL){rt_kprintf("pwm sample run failed! can't find %s device!\n", PWM_DEV_NAME);return RT_ERROR;}/* 设置PWM周期和脉冲宽度默认值 */rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);/* 使能设备 */rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL);while (1){rt_thread_mdelay(50);if (dir){pulse += 5000; /* 从0值开始每次增加5000ns */}else{pulse -= 5000; /* 从最大值开始每次减少5000ns */}if (pulse >= period){dir = 0;}if (0 == pulse){dir = 1;}/* 设置PWM周期和脉冲宽度 */rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);}
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(pwm_led_sample, pwm sample);
pwm驱动框架分析
-
pwm 驱动框架仅仅需要注册一个控制函数即可
-
pwm驱动根据命令的类型实现pwm控制
pwm 功能:
1.pwm 开启和关闭
2.设置pwm的周期和占空比
3.设置pwm的死区时间
4.设置pwm的相位
5.pwm互补输出相关
drv_pwm.h分析
/** Copyright (c) 2006-2023, RT-Thread Development Team** SPDX-License-Identifier: Apache-2.0** Change Logs:* Date Author Notes* 2018-05-07 aozima the first version* 2022-09-24 yuqi add phase and dead time configuration*/#ifndef __DRV_PWM_H_INCLUDE__
#define __DRV_PWM_H_INCLUDE__#include <rtthread.h>
//pwm 使能和关闭
#define PWM_CMD_ENABLE (RT_DEVICE_CTRL_BASE(PWM) + 0)
#define PWM_CMD_DISABLE (RT_DEVICE_CTRL_BASE(PWM) + 1)
//
#define PWM_CMD_SET (RT_DEVICE_CTRL_BASE(PWM) + 2)
#define PWM_CMD_GET (RT_DEVICE_CTRL_BASE(PWM) + 3)
//pwm互补使能和关闭
#define PWMN_CMD_ENABLE (RT_DEVICE_CTRL_BASE(PWM) + 4)
#define PWMN_CMD_DISABLE (RT_DEVICE_CTRL_BASE(PWM) + 5)
//设置周期和占空比
#define PWM_CMD_SET_PERIOD (RT_DEVICE_CTRL_BASE(PWM) + 6)
#define PWM_CMD_SET_PULSE (RT_DEVICE_CTRL_BASE(PWM) + 7)
//设置死区时间
#define PWM_CMD_SET_DEAD_TIME (RT_DEVICE_CTRL_BASE(PWM) + 8)
//设置相位
#define PWM_CMD_SET_PHASE (RT_DEVICE_CTRL_BASE(PWM) + 9)
//pwm 中断开启和关闭
#define PWM_CMD_ENABLE_IRQ (RT_DEVICE_CTRL_BASE(PWM) + 10)
#define PWM_CMD_DISABLE_IRQ (RT_DEVICE_CTRL_BASE(PWM) + 11)struct rt_pwm_configuration
{rt_uint32_t channel; /* 通道 0 ~ n or 0 ~ -n, which depends on specific MCU requirements */rt_uint32_t period; /* 周期 单位是 unit:ns 1ns~4.29s:1Ghz~0.23hz */rt_uint32_t pulse; /* 占空比 unit:ns (pulse<=period) */rt_uint32_t dead_time; /* 死区时间 unit:ns */rt_uint32_t phase; /*unit: 相位 degree, 0~360, which is the phase of pwm output, *//** RT_TRUE : The channel of pwm is complememtary.* RT_FALSE : The channel of pwm is nomal.*/rt_bool_t complementary;//互补输出使能
};struct rt_device_pwm;
/*cmd 命令类型arg 参数
*/
struct rt_pwm_ops
{rt_err_t (*control)(struct rt_device_pwm *device, int cmd, void *arg);
};
//pwm 驱动抽象模型
struct rt_device_pwm
{struct rt_device parent;const struct rt_pwm_ops *ops;
};//pwm驱动注册函数
rt_err_t rt_device_pwm_register(struct rt_device_pwm *device, const char *name, const struct rt_pwm_ops *ops, const void *user_data);/*pwm 功能:1.pwm 开启和关闭2.设置pwm的周期和占空比3.设置pwm的死区时间4.设置pwm的相位
*/rt_err_t rt_pwm_enable(struct rt_device_pwm *device, int channel);
rt_err_t rt_pwm_disable(struct rt_device_pwm *device, int channel);
rt_err_t rt_pwm_set(struct rt_device_pwm *device, int channel, rt_uint32_t period, rt_uint32_t pulse);
rt_err_t rt_pwm_set_period(struct rt_device_pwm *device, int channel, rt_uint32_t period);
rt_err_t rt_pwm_set_pulse(struct rt_device_pwm *device, int channel, rt_uint32_t pulse);
rt_err_t rt_pwm_set_dead_time(struct rt_device_pwm *device, int channel, rt_uint32_t dead_time);
rt_err_t rt_pwm_set_phase(struct rt_device_pwm *device, int channel, rt_uint32_t phase);#endif /* __DRV_PWM_H_INCLUDE__ */pwm 函数调用流程
函数的调用流程就是从上到下的调用

编写pwm驱动
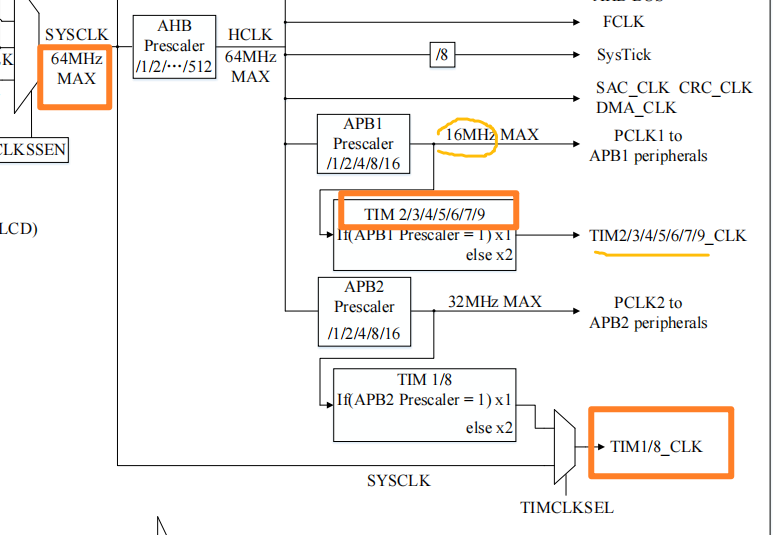
时钟
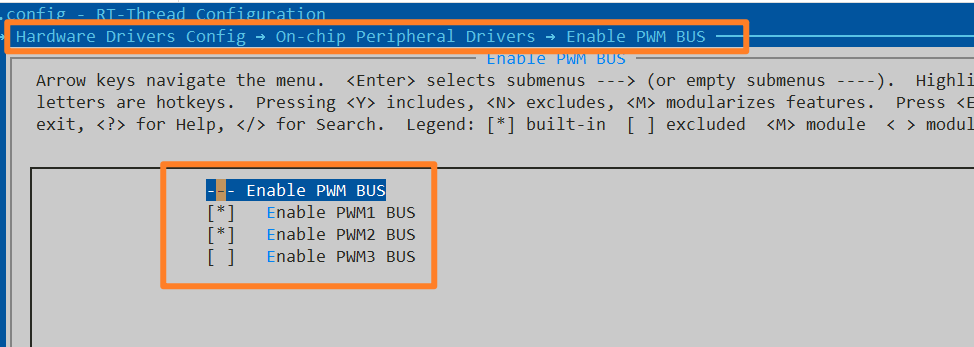
KCONFIG 配置
board 文件夹下的 KCONFIG 配置
menuconfig BSP_USING_PWMbool "Enable PWM BUS"default nselect RT_USING_PWMif BSP_USING_PWMconfig BSP_USING_PWM1bool "Enable PWM1 BUS"default nconfig BSP_USING_PWM2bool "Enable PWM2 BUS"default nconfig BSP_USING_PWM3bool "Enable PWM3 BUS"default nendif
修改完成以后menuconfig出现pwm配置选项
添加drv_pwm.c 和drv_pwm.h
这2个文件参考自stm32的pwm驱动函数
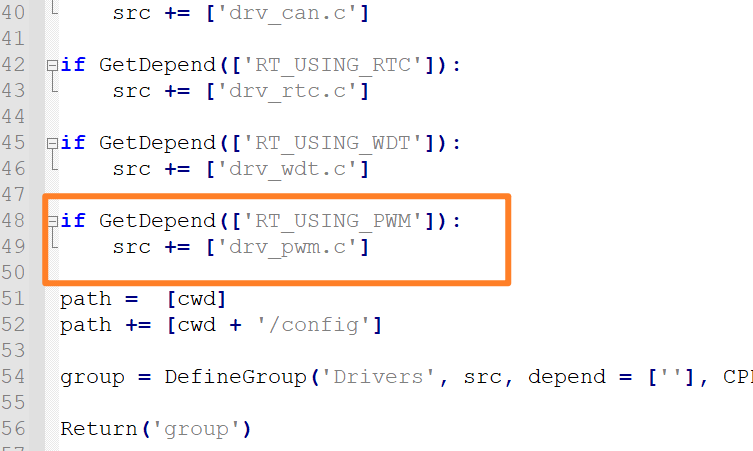
修改libraries\n32_drivers\SConscript文件增加drv_pwm.c的编译
if GetDepend(['RT_USING_PWM']):src += ['drv_pwm.c']
自己实现pwm驱动
由于N32L406系列官方的bsp没得陪我们驱动,我就自己实现一个
drv_pwm.h
这个主要是一个配置文件,配置每个pwm通道的变量
/** Copyright (c) 2006-2022, RT-Thread Development Team** SPDX-License-Identifier: Apache-2.0** Change Logs:* Date Author Notes* 2022-10-19 Nations first version*/#ifndef __DRV_PWM_H__
#define __DRV_PWM_H__#include <rthw.h>
#include <rtthread.h>
#include "board.h"#ifdef __cplusplus
extern "C" {
#endif#ifdef BSP_USING_PWM1
#define PWM1_CONFIG\{\.tim =TIM9,\.channel =0,\.gpio_grp =GPIOB,\.pin =GPIO_PIN_12,\.prescaler =32-1, \.gpio_af =GPIO_AF1_TIM9, \.name ="pwm0",\}
#endif #ifdef BSP_USING_PWM2
#define PWM2_CONFIG \{ \.tim =TIM9, \.channel =1, \.gpio_grp =GPIOB, \.pin =GPIO_PIN_13, \.prescaler =32-1, \.gpio_af =GPIO_AF1_TIM9, \.name ="pwm1", \}
#endif /* BSP_USING_PWM2 */#ifdef BSP_USING_PWM3
#define PWM2_CONFIG \{ \.tim =TIM9, \.channel =2, \.gpio_grp =GPIOB, \.pin =GPIO_PIN_14, \.prescaler =32-1, \.gpio_af =GPIO_AF1_TIM9, \.name ="pwm2", \}
#endif /* BSP_USING_PWM3 */#ifdef __cplusplus
}
#endif#endif /* __DRV_PWM_H__ */drv_pwm.c
/** Copyright (c) 2006-2023, RT-Thread Development Team** SPDX-License-Identifier: Apache-2.0** Change Logs:* Date Author Notes* 2018-12-13 zylx first version* 2021-01-23 thread-liu Fix the timer clock frequency doubling problem*/#include <board.h>
#include <rtconfig.h>
#include <rtconfig.h>#include <drivers/rt_drv_pwm.h>
#include <drv_pwm.h>
#include "n32l40x_tim.h"
#include "n32l40x_rcc.h"#ifdef BSP_USING_PWM
#ifdef PWM_DEBUG
#define LOG_E rt_kprintf
#define LOG_D LOG_E
#else
int printf_log(const char * fmt,...) {;}
#define LOG_E printf_log
#define LOG_D LOG_E#endifstruct n32_pwm
{struct rt_device_pwm pwm_device;//设备驱动框架的pwm对象TIM_Module *tim;//定时器指针rt_uint16_t channel;//定时器通道GPIO_Module* gpio_grp;//pwm 使用的gpio分组uint16_t pin;//pwm 使用的gpio pinuint16_t prescaler; //定时器预分频系数uint8_t gpio_af;//引脚复用功能char *name;//pwm名字也是驱动的名字};static struct n32_pwm n32_pwm_obj[] =
{
#ifdef BSP_USING_PWM1PWM1_CONFIG,
#endif#ifdef BSP_USING_PWM2PWM2_CONFIG,
#endif#ifdef BSP_USING_PWM3PWM3_CONFIG,
#endif#ifdef BSP_USING_PWM4PWM4_CONFIG,
#endif#ifdef BSP_USING_PWM5PWM5_CONFIG,
#endif#ifdef BSP_USING_PWM6PWM6_CONFIG,
#endif#ifdef BSP_USING_PWM7PWM7_CONFIG,
#endif#ifdef BSP_USING_PWM8PWM8_CONFIG,
#endif#ifdef BSP_USING_PWM9PWM9_CONFIG,
#endif#ifdef BSP_USING_PWM10PWM10_CONFIG,
#endif#ifdef BSP_USING_PWM11PWM11_CONFIG,
#endif#ifdef BSP_USING_PWM12PWM12_CONFIG,
#endif#ifdef BSP_USING_PWM13PWM13_CONFIG,
#endif#ifdef BSP_USING_PWM14PWM14_CONFIG,
#endif#ifdef BSP_USING_PWM15PWM15_CONFIG,
#endif#ifdef BSP_USING_PWM16PWM16_CONFIG,
#endif#ifdef BSP_USING_PWM17PWM17_CONFIG,
#endif
};static rt_uint64_t tim_clock_get(TIM_Module *htim)
{RCC_ClocksType RCC_Clocks;RCC_GetClocksFreqValue(&RCC_Clocks);LOG_D("%s %d \r\n",__FUNCTION__,__LINE__);if(htim==TIM1||htim==TIM8){return RCC_Clocks.Pclk2Freq;}else{return RCC_Clocks.Pclk1Freq;}return 0;
}//输出使能控制
static rt_err_t drv_pwm_enable(TIM_Module *time, struct rt_pwm_configuration *configuration, rt_bool_t enable)
{/* Converts the channel number to the channel number of Hal library */LOG_D("%s %d ch = %d \r\n",__FUNCTION__,__LINE__,configuration->channel);int x=0;if(enable){x= (0x01<<(4*configuration->channel));time->CCEN |=(0x01<<(4*configuration->channel));}else{x= ~(0x01<<(4*configuration->channel));time->CCEN &= ~(0x01<<(4*configuration->channel));}LOG_D("%s %d CCEN = %x x = %x\r\n",__FUNCTION__,__LINE__,time->CCEN,x);return RT_EOK;
}
//互补输出使能控制
static rt_err_t drv_pwmn_enable(TIM_Module *time, struct rt_pwm_configuration *configuration, rt_bool_t enable)
{/* Converts the channel number to the channel number of Hal library */(void)enable;LOG_D("%s %d ch=%d\r\n",__FUNCTION__,__LINE__,configuration->channel);if(TIM1==time || TIM8==time){if(enable){time->CCEN |=(0x02<<(4*configuration->channel));}else{time->CCEN &= !(0x02<<(4*configuration->channel));}}return RT_EOK;
}
static rt_err_t drv_pwm_get(TIM_Module *htim, struct rt_pwm_configuration *configuration)
{LOG_D("%s %d \r\n",__FUNCTION__,__LINE__);configuration->period = TIM_GetAutoReload(htim);switch(configuration->channel){case 0:configuration->pulse =TIM_GetCap1(htim);break;case 1:configuration->pulse =TIM_GetCap2(htim);break;case 2:configuration->pulse =TIM_GetCap3(htim);break;case 3:configuration->pulse =TIM_GetCap4(htim);break;default:configuration->pulse =0;break;}return RT_EOK;
}static rt_err_t drv_pwm_set(TIM_Module *htim, struct rt_pwm_configuration *configuration)
{LOG_D("%s %d ch=%d\r\n",__FUNCTION__,__LINE__,configuration->channel);TIM_SetAutoReload(htim,configuration->period);switch(configuration->channel){case 0:TIM_SetCmp1(htim,configuration->pulse);break;case 1:TIM_SetCmp2(htim,configuration->pulse);break;case 2:TIM_SetCmp3(htim,configuration->pulse);break;case 3:TIM_SetCmp4(htim,configuration->pulse);break;default:configuration->pulse =0;break;}return RT_EOK;
}static rt_err_t drv_pwm_set_period(TIM_Module *htim, struct rt_pwm_configuration *configuration)
{LOG_D("%s %d \r\n",__FUNCTION__,__LINE__);TIM_SetAutoReload(htim,configuration->period);return RT_EOK;
}static rt_err_t drv_pwm_set_pulse(TIM_Module *htim, struct rt_pwm_configuration *configuration)
{// LOG_D("%s %d \r\n",__FUNCTION__,__LINE__);switch(configuration->channel){case 0:TIM_SetCmp1(htim,configuration->pulse);LOG_D("%s %d TIM_SetCmp1 \r\n",__FUNCTION__,__LINE__);break;case 1:TIM_SetCmp2(htim,configuration->pulse);break;case 2:TIM_SetCmp3(htim,configuration->pulse);break;case 3:TIM_SetCmp4(htim,configuration->pulse);break;default:configuration->pulse =0;break;}return RT_EOK;
}static rt_err_t drv_pwm_control(struct rt_device_pwm *device, int cmd, void *arg)
{struct rt_pwm_configuration *configuration = (struct rt_pwm_configuration *)arg;struct n32_pwm *pwm = (struct n32_pwm *)device->parent.user_data;LOG_D("%s %d cmd = %d\r\n",__FUNCTION__,__LINE__,cmd);switch (cmd){case PWM_CMD_ENABLE:return drv_pwm_enable(pwm->tim, configuration, RT_TRUE);case PWM_CMD_DISABLE:return drv_pwm_enable(pwm->tim, configuration, RT_FALSE);case PWM_CMD_SET:return drv_pwm_set(pwm->tim, configuration);case PWM_CMD_SET_PERIOD:return drv_pwm_set_period(pwm->tim, configuration);case PWM_CMD_SET_PULSE:return drv_pwm_set_pulse(pwm->tim, configuration);case PWM_CMD_GET:return drv_pwm_get(pwm->tim, configuration);default:return -RT_EINVAL;}
}
/*** @brief 配置时钟*/
static void pwm_time_rcc_config(TIM_Module *htim,GPIO_Module *gpio_grp)
{LOG_D("%s %d \r\n",__FUNCTION__,__LINE__);if(TIM1==htim){RCC_EnableAPB2PeriphClk(RCC_APB2_PERIPH_TIM1, ENABLE);}else if(TIM2==htim){RCC_EnableAPB1PeriphClk(RCC_APB1_PERIPH_TIM2, ENABLE);}else if(TIM3==htim){RCC_EnableAPB1PeriphClk(RCC_APB1_PERIPH_TIM3, ENABLE);}else if(TIM4==htim){RCC_EnableAPB1PeriphClk(RCC_APB1_PERIPH_TIM4, ENABLE);}else if(TIM5==htim){RCC_EnableAPB1PeriphClk(RCC_APB1_PERIPH_TIM5, ENABLE);}else if(TIM6==htim){RCC_EnableAPB1PeriphClk(RCC_APB1_PERIPH_TIM6, ENABLE);}else if(TIM7==htim){RCC_EnableAPB1PeriphClk(RCC_APB1_PERIPH_TIM7, ENABLE);}else if(TIM8==htim){RCC_EnableAPB2PeriphClk(RCC_APB2_PERIPH_TIM8, ENABLE);}else if(TIM9==htim){RCC_EnableAPB1PeriphClk(RCC_APB1_PERIPH_TIM9, ENABLE);LOG_D("%s %d RCC_EnableAPB1PeriphClk TIM9 \r\n",__FUNCTION__,__LINE__);}if(GPIOA==gpio_grp){RCC_EnableAPB2PeriphClk(RCC_APB2_PERIPH_GPIOA, ENABLE);}else if(GPIOB==gpio_grp){RCC_EnableAPB2PeriphClk(RCC_APB2_PERIPH_GPIOB, ENABLE);LOG_D("%s %d RCC_EnableAPB2PeriphClk GPIOB \r\n",__FUNCTION__,__LINE__);}else if(GPIOC==gpio_grp){RCC_EnableAPB2PeriphClk(RCC_APB2_PERIPH_GPIOC, ENABLE);}else if(GPIOD==gpio_grp){RCC_EnableAPB2PeriphClk(RCC_APB2_PERIPH_GPIOD, ENABLE);}}/*** @brief 配置pwm输出对应的gpio引脚*/
static void pwm_time_gpio_config(struct n32_pwm *htim){LOG_D("%s %d \r\n",__FUNCTION__,__LINE__);GPIO_InitType GPIO_InitStructure;GPIO_InitStruct(&GPIO_InitStructure);GPIO_InitStructure.Pin = htim->pin;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Current = GPIO_DC_4mA;GPIO_InitStructure.GPIO_Alternate = htim->gpio_af;GPIO_InitPeripheral(htim->gpio_grp, &GPIO_InitStructure);
}static rt_err_t n32_hw_pwm_init(struct n32_pwm *device)
{LOG_D("%s %d \r\n",__FUNCTION__,__LINE__);rt_err_t result = RT_EOK;TIM_TimeBaseInitType TIM_TimeBaseStructure;OCInitType TIM_OCInitStructure;RT_ASSERT(device != RT_NULL);pwm_time_rcc_config(device->tim,device->gpio_grp);pwm_time_gpio_config(device);TIM_TimeBaseStructure.Period = 100;TIM_TimeBaseStructure.Prescaler = device->prescaler;TIM_TimeBaseStructure.ClkDiv = 0;TIM_TimeBaseStructure.CntMode = TIM_CNT_MODE_UP;TIM_InitTimeBase(device->tim, &TIM_TimeBaseStructure);/* PWM1 Mode configuration: Channel1 */TIM_OCInitStructure.OcMode = TIM_OCMODE_PWM1;TIM_OCInitStructure.OutputState = TIM_OUTPUT_STATE_ENABLE;TIM_OCInitStructure.Pulse = 0;TIM_OCInitStructure.OcPolarity = TIM_OC_POLARITY_LOW;switch(device->channel){case 0:TIM_InitOc1(device->tim, &TIM_OCInitStructure);TIM_ConfigOc1Preload(device->tim, TIM_OC_PRE_LOAD_ENABLE);LOG_D("%s %d PWM CH0 CFG\r\n",__FUNCTION__,__LINE__);break;case 1:TIM_InitOc2(device->tim, &TIM_OCInitStructure);TIM_ConfigOc2Preload(device->tim, TIM_OC_PRE_LOAD_ENABLE);break;case 2:TIM_InitOc3(device->tim, &TIM_OCInitStructure);TIM_ConfigOc3Preload(device->tim, TIM_OC_PRE_LOAD_ENABLE);break;case 3:TIM_InitOc4(device->tim, &TIM_OCInitStructure);TIM_ConfigOc4Preload(device->tim, TIM_OC_PRE_LOAD_ENABLE);break;default:break;}TIM_ConfigArPreload(device->tim, ENABLE);TIM_Enable(device->tim, ENABLE);if( device->tim == TIM1 || device->tim== TIM8 ){TIM_EnableCtrlPwmOutputs(device->tim, ENABLE);}LOG_D("%s 32_pwm_init", device->name);return result;
}static rt_err_t drv_pwm_control(struct rt_device_pwm *device, int cmd, void *arg);
static struct rt_pwm_ops drv_ops =
{drv_pwm_control
};static int n32_pwm_init(void)
{int i = 0;int result = RT_EOK;for (i = 0; i < sizeof(n32_pwm_obj) / sizeof(n32_pwm_obj[0]); i++){/* pwm init */if (n32_hw_pwm_init(&n32_pwm_obj[i]) != RT_EOK){LOG_E("%s init failed", n32_pwm_obj[i].name);result = -RT_ERROR;goto __exit;}else{LOG_D("%s init success", n32_pwm_obj[i].name);/* register pwm device */if (rt_device_pwm_register(&n32_pwm_obj[i].pwm_device, n32_pwm_obj[i].name, &drv_ops, n32_pwm_obj+i) == RT_EOK){LOG_D("%s register success", n32_pwm_obj[i].name);}else{LOG_E("%s register failed", n32_pwm_obj[i].name);result = -RT_ERROR;}}}__exit:return result;
}
INIT_DEVICE_EXPORT(n32_pwm_init);#endif /* BSP_USING_PWM */pwm 驱动测试
pwm驱动框架提供了pwm测试函数
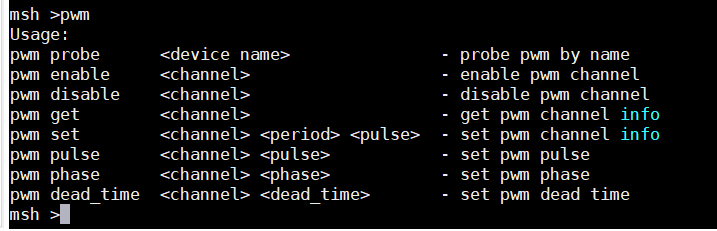
pwm官方的框架测试函数代码
#ifdef RT_USING_FINSH
#include <stdlib.h>
#include <string.h>
#include <finsh.h>static int pwm(int argc, char **argv)
{rt_err_t result = -RT_ERROR;char *result_str;static struct rt_device_pwm *pwm_device = RT_NULL;struct rt_pwm_configuration cfg = {0};if(argc > 1){if(!strcmp(argv[1], "probe")){if(argc == 3){pwm_device = (struct rt_device_pwm *)rt_device_find(argv[2]);result_str = (pwm_device == RT_NULL) ? "failure" : "success";rt_kprintf("probe %s %s\n", argv[2], result_str);}else{rt_kprintf("pwm probe <device name> - probe pwm by name\n");}}else{if(pwm_device == RT_NULL){rt_kprintf("Please using 'pwm probe <device name>' first.\n");return -RT_ERROR;}if(!strcmp(argv[1], "enable")){if(argc == 3){result = rt_pwm_enable(pwm_device, atoi(argv[2]));result_str = (result == RT_EOK) ? "success" : "failure";rt_kprintf("%s channel %d is enabled %s \n", pwm_device->parent.parent.name, atoi(argv[2]), result_str);}else{rt_kprintf("pwm enable <channel> - enable pwm channel\n");rt_kprintf(" e.g. MSH >pwm enable 1 - PWM_CH1 nomal\n");rt_kprintf(" e.g. MSH >pwm enable -1 - PWM_CH1N complememtary\n");}}else if(!strcmp(argv[1], "disable")){if(argc == 3){result = rt_pwm_disable(pwm_device, atoi(argv[2]));}else{rt_kprintf("pwm disable <channel> - disable pwm channel\n");}}else if(!strcmp(argv[1], "get")){cfg.channel = atoi(argv[2]);result = rt_pwm_get(pwm_device, &cfg);if(result == RT_EOK){rt_kprintf("Info of device [%s] channel [%d]:\n",pwm_device, atoi(argv[2]));rt_kprintf("period : %d\n", cfg.period);rt_kprintf("pulse : %d\n", cfg.pulse);rt_kprintf("Duty cycle : %d%%\n",(int)(((double)(cfg.pulse)/(cfg.period)) * 100));}else{rt_kprintf("Get info of device: [%s] error.\n", pwm_device);}}else if (!strcmp(argv[1], "set")){if(argc == 5){result = rt_pwm_set(pwm_device, atoi(argv[2]), atoi(argv[3]), atoi(argv[4]));rt_kprintf("pwm info set on %s at channel %d\n",pwm_device,(rt_base_t)atoi(argv[2]));}else{rt_kprintf("Set info of device: [%s] error\n", pwm_device);rt_kprintf("Usage: pwm set <channel> <period> <pulse>\n");}}else if(!strcmp(argv[1], "phase")){if(argc == 4){result = rt_pwm_set_phase(pwm_device, atoi(argv[2]),atoi(argv[3]));result_str = (result == RT_EOK) ? "success" : "failure";rt_kprintf("%s phase is set %d \n", pwm_device->parent.parent.name, (rt_base_t)atoi(argv[3]));}}else if(!strcmp(argv[1], "pulse")){if(argc == 4){result = rt_pwm_set_pulse(pwm_device, atoi(argv[2]),atoi(argv[3]));result_str = (result == RT_EOK) ? "success" : "failure";rt_kprintf("%s pulse is set %d \n", pwm_device->parent.parent.name, (rt_base_t)atoi(argv[3]));}}else if(!strcmp(argv[1], "dead_time")){if(argc == 4){result = rt_pwm_set_dead_time(pwm_device, atoi(argv[2]),atoi(argv[3]));result_str = (result == RT_EOK) ? "success" : "failure";rt_kprintf("%s dead_time is set %d \n", pwm_device->parent.parent.name, (rt_base_t)atoi(argv[3]));}}else{rt_kprintf("Usage: \n");rt_kprintf("pwm probe <device name> - probe pwm by name\n");rt_kprintf("pwm enable <channel> - enable pwm channel\n");rt_kprintf("pwm disable <channel> - disable pwm channel\n");rt_kprintf("pwm get <channel> - get pwm channel info\n");rt_kprintf("pwm set <channel> <period> <pulse> - set pwm channel info\n");rt_kprintf("pwm pulse <channel> <pulse> - set pwm pulse\n");rt_kprintf("pwm phase <channel> <phase> - set pwm phase\n");rt_kprintf("pwm dead_time <channel> <dead_time> - set pwm dead time\n");result = -RT_ERROR;}}}else{rt_kprintf("Usage: \n");rt_kprintf("pwm probe <device name> - probe pwm by name\n");rt_kprintf("pwm enable <channel> - enable pwm channel\n");rt_kprintf("pwm disable <channel> - disable pwm channel\n");rt_kprintf("pwm get <channel> - get pwm channel info\n");rt_kprintf("pwm set <channel> <period> <pulse> - set pwm channel info\n");rt_kprintf("pwm pulse <channel> <pulse> - set pwm pulse\n");rt_kprintf("pwm phase <channel> <phase> - set pwm phase\n");rt_kprintf("pwm dead_time <channel> <dead_time> - set pwm dead time\n");result = -RT_ERROR;}return RT_EOK;
}
MSH_CMD_EXPORT(pwm, pwm [option]);