Hands on RL 之 Deep Deterministic Policy Gradient(DDPG)
文章目录
- Hands on RL 之 Deep Deterministic Policy Gradient(DDPG)
- 1. 理论部分
- 1.1 回顾 Deterministic Policy Gradient(DPG)
- 1.2 Neural Network Difference
- 1.3 Why is off-policy?
- 1.4 Soft target update
- 1.5 Maintain Exploration
- 1.6 Other Techniques
- 1.7 Pesudocode
- 2. 代码实践
- Reference
1. 理论部分
1.1 回顾 Deterministic Policy Gradient(DPG)
在介绍DDPG之前,我们先回顾一下DPG中最重要的结论,
Deterministic Policy Gradient Theorem即确定性策略梯度定理
∇ θ J ( μ θ ) = ∫ S ρ μ ( s ) ∇ θ μ θ ( s ) ∇ a Q μ ( s , a ) ∣ a = μ θ ( s ) d s = E s ∼ ρ μ [ ∇ θ μ θ ( s ) ∇ a Q μ ( s , a ) ∣ a = μ θ ( s ) ] \begin{aligned} \nabla_\theta J(\mu_\theta) & = \int_{\mathcal{S}} \rho^\mu(s) \nabla_\theta \mu_\theta(s) \nabla_a Q^\mu(s,a)|_{a=\mu_\theta(s)} \mathrm{d}s \\ & = \mathbb{E}_{s\sim\rho^\mu} \Big[ \nabla_\theta \mu_\theta(s) \nabla_a Q^\mu(s,a)|_{a=\mu_\theta(s)} \Big] \end{aligned} ∇θJ(μθ)=∫Sρμ(s)∇θμθ(s)∇aQμ(s,a)∣a=μθ(s)ds=Es∼ρμ[∇θμθ(s)∇aQμ(s,a)∣a=μθ(s)]
其中, a = μ θ ( s ) a=\mu_\theta(s) a=μθ(s)表示确定性的策略是从状态空间到动作空间的映射 μ θ : S → A \mu_\theta: \mathcal{S}\to\mathcal{A} μθ:S→A,网络的参数为 θ \theta θ, s ∼ ρ μ s\sim\rho^\mu s∼ρμ表示状态 s s s符合在策略 μ \mu μ下的状态访问分布。如何推导的,这里不详细阐述。(可以参考Deterministic policy gradient algorithms)
接下来逐点介绍DDPG相较于DPG的改进
1.2 Neural Network Difference
DDPG在相较于传统的AC算法在网络结构上也有很大不同,首先看看传统算法的网络结构
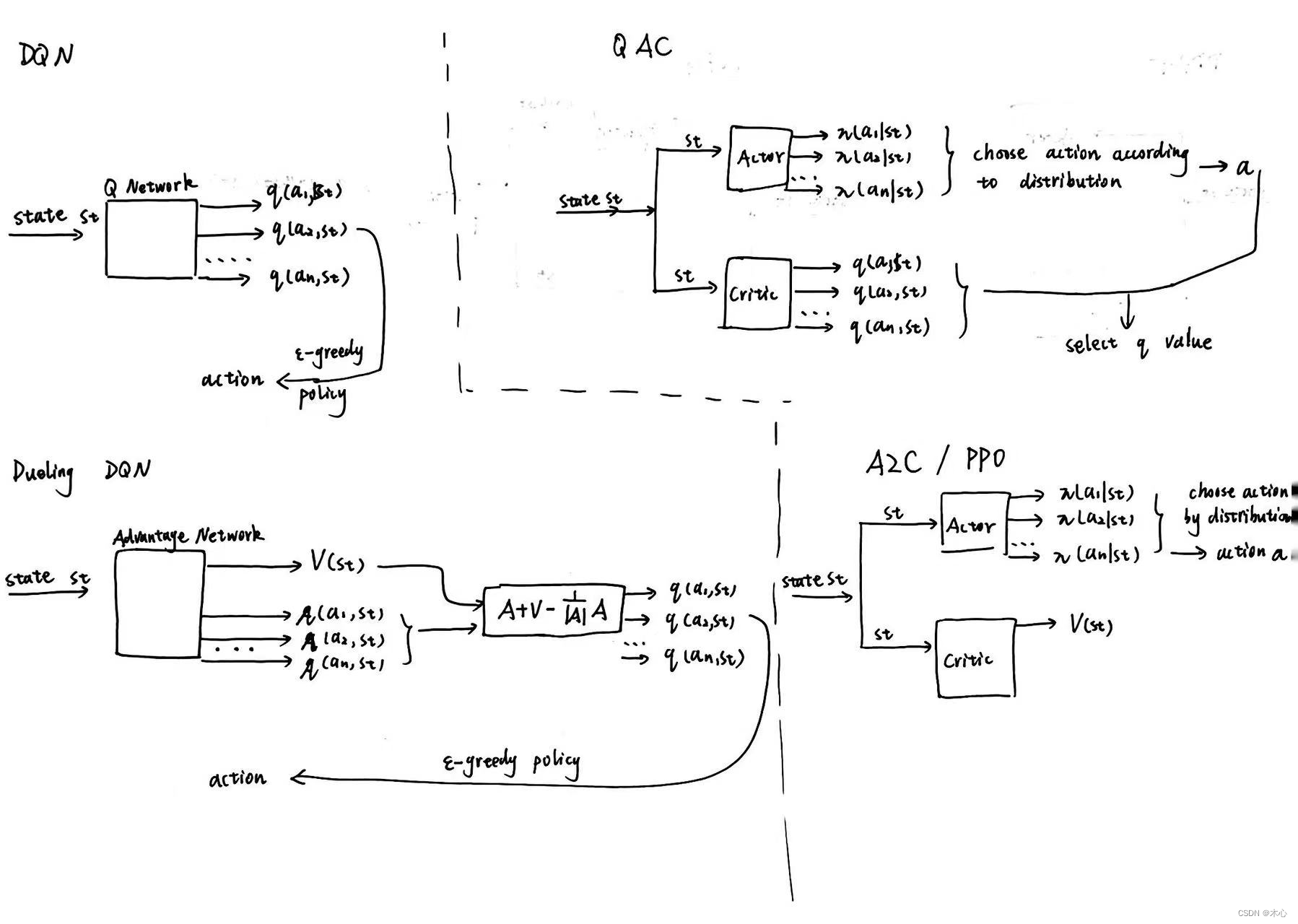
然后再看看DDPG的网络结构
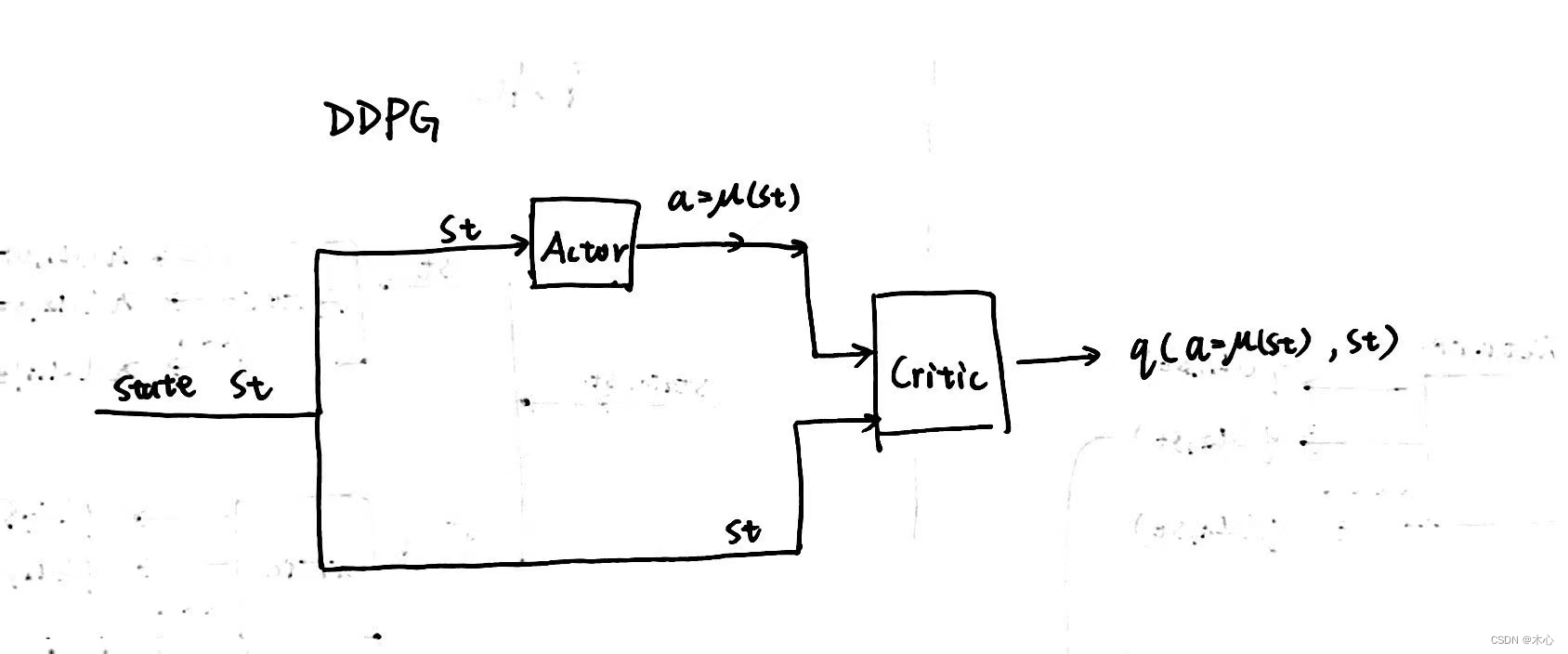
为什么DDPG会是这样的网络结构呢,这是因为DDPG中的actor输出的是确定性动作,而不是动作的概率分布,因此确定性的动作是连续的可以看作动作空间的维度为无穷,如果采用AC中critic的结构,我们无法通过遍历所有动作来取出某个特定动作对应的Q-value。因此DDPG中将actor的输出作为critic的输入,再联合状态输入,就能直接获得所采取动作 a = μ ( s t ) a=\mu(st) a=μ(st)的Q-value。
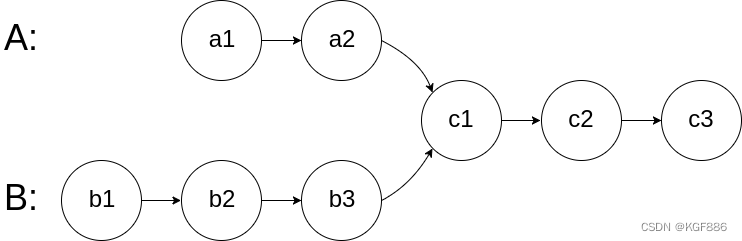
1.3 Why is off-policy?
首先为什么DDPG或者说DPG是off-policy的?我们回顾stochastic policy π θ ( a ∣ s ) \pi_\theta(a|s) πθ(a∣s)定义下的Q-value
Q π ( s t , a t ) = E r t , s t + 1 ∼ E [ r ( s t , a t ) + γ E a t + 1 ∼ π [ Q π ( s t + 1 , a t + 1 ) ] ] Q^\pi(s_t,a_t) = \mathbb{E}_{r_t, s_{t+1}\sim E}[r(s_t,a_t) + \gamma \mathbb{E}_{a_{t+1}\sim\pi}[Q^\pi(s_{t+1}, a_{t+1})]] Qπ(st,at)=Ert,st+1∼E[r(st,at)+γEat+1∼π[Qπ(st+1,at+1)]]
其中, E E E表示的是环境,即状态 s ∼ E s\sim E s∼E状态符合环境本身的分布。当我们使用确定性策略的时候 a = μ θ ( s ) a=\mu_\theta(s) a=μθ(s),那么inner expectation就自动被抵消掉了
Q π ( s t , a t ) = E r t , s t + 1 ∼ E [ r ( s t , a t ) + γ Q π ( s t + 1 , a t + 1 = μ ( s t + 1 ) ) ] Q^\pi(s_t,a_t) = \mathbb{E}_{r_t, s_{t+1}\sim E}[r(s_t,a_t) + \gamma Q^\pi(s_{t+1}, a_{t+1}=\mu(s_{t+1}))] Qπ(st,at)=Ert,st+1∼E[r(st,at)+γQπ(st+1,at+1=μ(st+1))]
这就意味着Q-value不再依赖于动作的访问分布,即没有了 a t + 1 ∼ π a_{t+1}\sim\pi at+1∼π。那么我们就可以通过行为策略behavior policy β \beta β产生的结果来计算该值,这让off-policy成为可能。
实际上Q-value不再依赖于动作的访问分布,那么确定性梯度定理可以写作
∇ θ J ( μ θ ) ≈ E s ∼ ρ β [ ∇ θ μ θ ( s ) ∇ a Q μ ( s , a ) ∣ a = μ θ ( s ) ] \textcolor{red}{\nabla_\theta J(\mu_\theta) \approx \mathbb{E}_{s\sim\rho^\beta} \Big[ \nabla_\theta \mu_\theta(s) \nabla_a Q^\mu(s,a)|_{a=\mu_\theta(s)} \Big]} ∇θJ(μθ)≈Es∼ρβ[∇θμθ(s)∇aQμ(s,a)∣a=μθ(s)]
可以写作依赖于behavior policy β \beta β产生的状态访问分布的期望,这就是一种off-policy的形式。
1.4 Soft target update
在DDPG中维护了四个神经网络,分别是policy network, target policy network, action value network, target action value network。使用了DQN中的将目标网络和训练网络分离的思想,并且采用soft更新的方式,能够更有效维护训练中的稳定性。soft更新方式如下
θ − ← τ θ + ( 1 − τ ) θ − \theta^- \leftarrow \tau \theta + (1-\tau)\theta^- θ−←τθ+(1−τ)θ−
其中, θ − \theta^- θ−表示目标网络参数, θ \theta θ表示训练网络参数, τ ≪ 1 \tau \ll 1 τ≪1, τ \tau τ是软更新参数。
1.5 Maintain Exploration
确定性的策略是不具有探索性的,为了保持策略的探索性,我们可以在策略网络的输出中增加高斯噪声,让输出的动作值有些许偏差来增加网络的探索性。用数学的方式来表示即是
μ ′ ( s t ) = μ θ ( s t ) + N \mu^\prime(s_t) = \mu_\theta(s_t) + \mathcal{N} μ′(st)=μθ(st)+N
其中 μ ′ \mu^\prime μ′表示探索性的策略, N \mathcal{N} N表示高斯噪声。
1.6 Other Techniques
DDPG还集成了一些别的算法的常用技巧,比如Replay Buffer来产生independent and identically distribution的样本,使用了Batch Normalization来预处理数据。
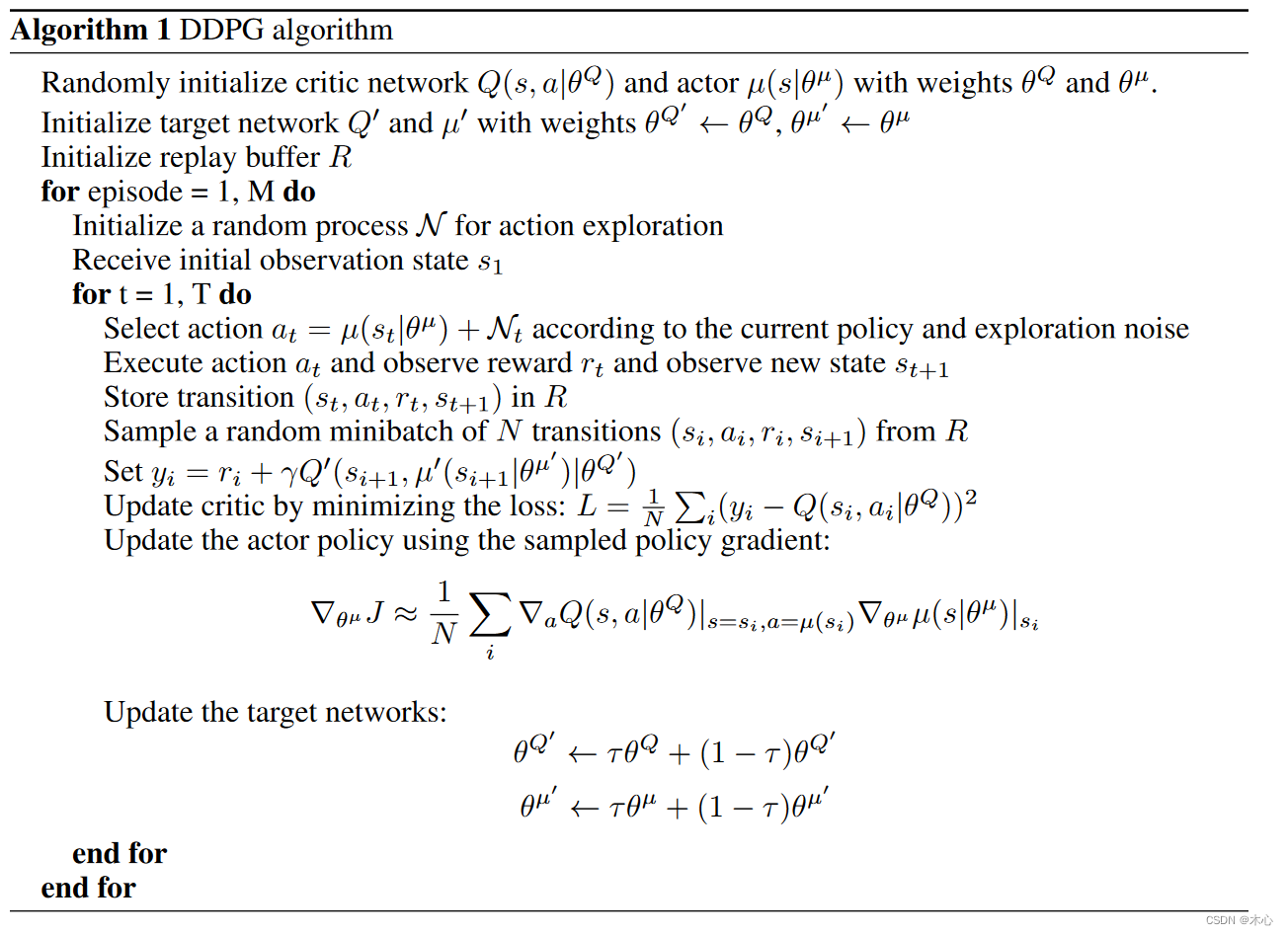
1.7 Pesudocode
伪代码如下
2. 代码实践
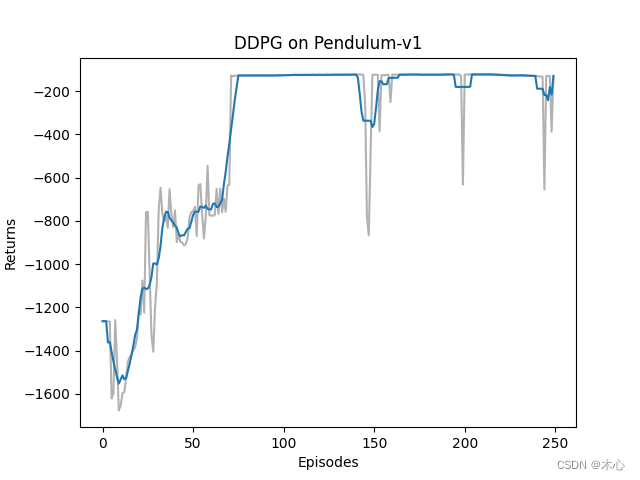
我们采用gym中的Pendulum-v1作为本次实验的环境,Pendulum-v1是典型的确定性连续动作空间环境,整体的代码如下
import torch
import torch.nn as nn
import torch.nn.functional as F
import gym
import random
from tqdm import tqdm
import numpy as np
import matplotlib.pyplot as plt
import collections# Policy Network
class PolicyNet(nn.Module):def __init__(self, state_dim, hidden_dim, action_dim, action_bound):super(PolicyNet, self).__init__()self.fc1 = nn.Linear(state_dim, hidden_dim)self.fc2 = nn.Linear(hidden_dim, action_dim)self.action_bound = action_bounddef forward(self, observation):x = F.relu(self.fc1(observation))x = F.tanh(self.fc2(x))return x * self.action_bound# Q Value Network
class QValueNet(nn.Module):def __init__(self, state_dim, hidden_dim, action_dim):super(QValueNet, self).__init__()self.fc1 = nn.Linear(state_dim + action_dim, hidden_dim)self.fc2 = nn.Linear(hidden_dim, hidden_dim)self.fc_out = nn.Linear(hidden_dim, 1)def forward(self, x, a):cat = torch.cat([x, a], dim=1) # 拼接状态和动作x = F.relu(self.fc1(cat))x = F.relu(self.fc2(x))return self.fc_out(x)# Deep Deterministic Policy Gradient
class DDPG():def __init__(self, state_dim, hidden_dim, action_dim, action_bound, actor_lr, critic_lr, sigma, tau, gamma, device):self.actor = PolicyNet(state_dim, hidden_dim, action_dim, action_bound).to(device)self.critic = QValueNet(state_dim, hidden_dim, action_dim).to(device)self.target_actor = PolicyNet(state_dim, hidden_dim, action_dim, action_bound).to(device)self.target_critic = QValueNet(state_dim, hidden_dim, action_dim).to(device)# initialize target actor network with same parametersself.target_actor.load_state_dict(self.actor.state_dict())# initialize target critic network with same parametersself.target_critic.load_state_dict(self.critic.state_dict())self.actor_optimizer = torch.optim.Adam(self.actor.parameters(), lr=actor_lr)self.critic_optimizer = torch.optim.Adam(self.critic.parameters(), lr=critic_lr)self.gamma = gammaself.sigma = sigma # 高斯噪声的标准差,均值直接设置为0self.action_dim = action_dimself.device = deviceself.tau = taudef take_action(self, state):state = torch.tensor(np.array([state]), dtype=torch.float).to(self.device)action = self.actor(state).item()# add noise to increase exploratoryaction = action + self.sigma * np.random.randn(self.action_dim)return actiondef soft_update(self, net, target_net):# implement soft update rulefor param_target, param in zip(target_net.parameters(), net.parameters()):param_target.data.copy_(param_target.data * (1.0-self.tau) + param.data * self.tau)def update(self, transition_dict):states = torch.tensor(transition_dict['states'], dtype=torch.float).to(self.device)rewards = torch.tensor(transition_dict['rewards'], dtype=torch.float).view(-1,1).to(self.device)actions = torch.tensor(transition_dict['actions'], dtype=torch.float).view(-1,1).to(self.device)next_states = torch.tensor(transition_dict['next_states'], dtype=torch.float).to(self.device)dones = torch.tensor(transition_dict['dones'], dtype=torch.float).view(-1,1).to(self.device)next_q_values = self.target_critic(next_states, self.target_actor(next_states))td_targets = rewards + self.gamma * next_q_values * (1-dones)critic_loss = torch.mean(F.mse_loss(self.critic(states, actions), td_targets))self.critic_optimizer.zero_grad()critic_loss.backward()self.critic_optimizer.step()actor_loss = torch.mean( - self.critic(states, self.actor(states)))self.actor_optimizer.zero_grad()actor_loss.backward()self.actor_optimizer.step()# soft update actor net and critic netself.soft_update(self.actor, self.target_actor)self.soft_update(self.critic, self.target_critic)class ReplayBuffer():def __init__(self, capacity):self.buffer = collections.deque(maxlen=capacity)def add(self, s, a, r, s_, d):self.buffer.append((s,a,r,s_,d))def sample(self, batch_size):transitions = random.sample(self.buffer, batch_size)states, actions, rewards, next_states, dones = zip(*transitions)return np.array(states), actions, np.array(rewards), np.array(next_states), donesdef size(self):return len(self.buffer)def train_off_policy_agent(env, agent, num_episodes, replay_buffer, minimal_size, batch_size, render, seed_number):return_list = []for i in range(10):with tqdm(total=int(num_episodes/10), desc='Iteration %d'%(i+1)) as pbar:for i_episode in range(int(num_episodes/10)):observation, _ = env.reset(seed=seed_number)done = Falseepisode_return = 0while not done:if render:env.render()action = agent.take_action(observation)observation_, reward, terminated, truncated, _ = env.step(action)done = terminated or truncatedreplay_buffer.add(observation, action, reward, observation_, done)# swap statesobservation = observation_episode_return += rewardif replay_buffer.size() > minimal_size:b_s, b_a, b_r, b_ns, b_d = replay_buffer.sample(batch_size)transition_dict = {'states': b_s,'actions': b_a,'rewards': b_r,'next_states': b_ns,'dones': b_d}agent.update(transition_dict)return_list.append(episode_return)if(i_episode+1) % 10 == 0:pbar.set_postfix({'episode': '%d'%(num_episodes/10 * i + i_episode + 1),'return': "%.3f"%(np.mean(return_list[-10:]))})pbar.update(1)env.close()return return_listdef moving_average(a, window_size):cumulative_sum = np.cumsum(np.insert(a, 0, 0)) middle = (cumulative_sum[window_size:] - cumulative_sum[:-window_size]) / window_sizer = np.arange(1, window_size-1, 2)begin = np.cumsum(a[:window_size-1])[::2] / rend = (np.cumsum(a[:-window_size:-1])[::2] / r)[::-1]return np.concatenate((begin, middle, end))def plot_curve(return_list, mv_return, algorithm_name, env_name):episodes_list = list(range(len(return_list)))plt.plot(episodes_list, return_list, c='gray', alpha=0.6)plt.plot(episodes_list, mv_return)plt.xlabel('Episodes')plt.ylabel('Returns')plt.title('{} on {}'.format(algorithm_name, env_name))plt.show()if __name__ == "__main__":# reproducibleseed_number = 0random.seed(seed_number)np.random.seed(seed_number)torch.manual_seed(seed_number)num_episodes = 250 # episodes lengthhidden_dim = 128 # hidden layers dimensiongamma = 0.98 # discounted rateactor_lr = 1e-3 # lr of actorcritic_lr = 1e-3 # lr of critictau = 0.005 # soft update parametersigma = 0.01 # std variance of guassian noisebuffer_size = 10000minimal_size = 1000batch_size = 64device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')env_name = 'Pendulum-v1'render = Falseif render:env = gym.make(id=env_name, render_mode='human')else:env = gym.make(id=env_name)state_dim = env.observation_space.shape[0]action_dim = env.action_space.shape[0] action_bound = env.action_space.high[0]replay_buffer = ReplayBuffer(buffer_size) agent = DDPG(state_dim, hidden_dim, action_dim, action_bound, actor_lr, critic_lr, sigma, tau, gamma, device)return_list = train_off_policy_agent(env, agent, num_episodes, replay_buffer, minimal_size, batch_size, render, seed_number)mv_return = moving_average(return_list, 9)plot_curve(return_list, mv_return, 'DDPG', env_name)DDPG训练的回报曲线如图所示
Reference
Tutorial: Hands on RL
Paper: Continuous control with deep reinforcement learning