在七月算法报的班,老师讲的蛮好。好记性不如烂笔头,关键内容还是记录一下吧,课程入口,感兴趣的同学可以学习一下。
-------------------------------------------------------------------------------------------------------------------------------
SLAM的前段和后端都存在误差,因为建图与定位是耦合的,所以整个误差会积累。
回环检测是通过检测出之前去过的地点,对预测的轨迹进行修正。
回环检测的步骤:
❑ 检测到回环的发生
❑ 计算回环修选帧与当前帧的运动
❑ 验证回环是否成立
❑ 闭环
验证两帧之间的相似度,有以下几种常用的策略,其中基于外观的方法是主流,核心在于衡量两帧图像之间的相似度。
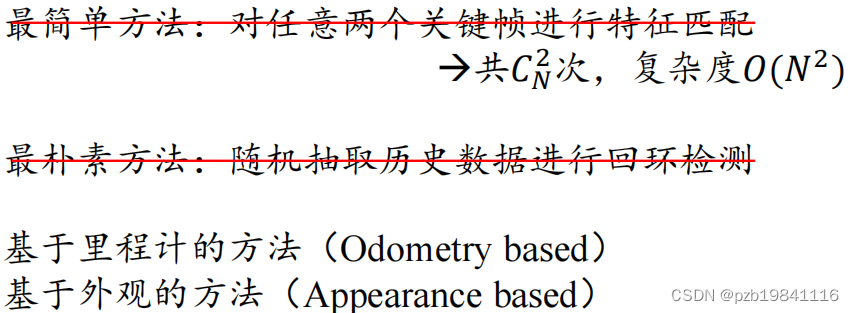
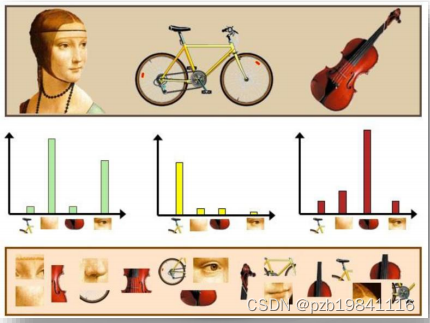
基于外观的主要方法:词袋BoW,词袋是对特征的聚类
➢ 特征聚类形成了 Word
➢ 许多 Word 组成了 Dictionary
➢ 只看 Word 的有无,无视 Word 的顺序
➢ 图像的相似性 = Word 的相似性
其中会对各word用one-hot模式进行编码
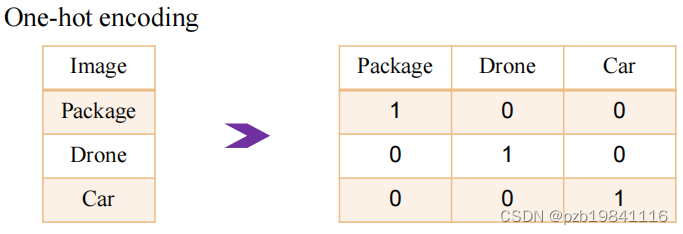
再通过词的相似度,推算出图像的相似度。
聚类: 无监督机器学习(Unsupervised ML)中一个特别常见的问题;
❖ 用于让机器自行寻找数据中的规律的问题。
BoW的字典生成问题亦属于其中之一,N个特征点,归为k个单词。
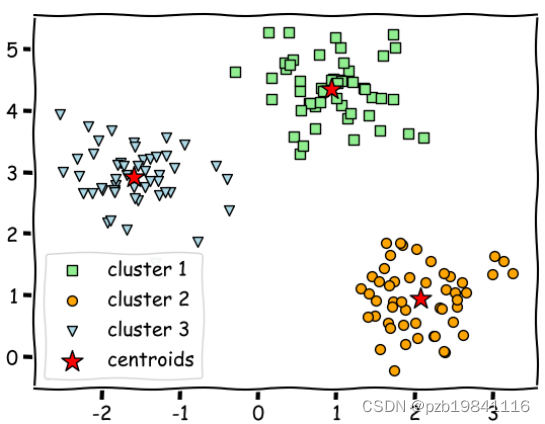
K-Means 的算法流程
当我们有N个数据,想要归为k各类:
➢ 随机选取k个中心点:𝑐1, 𝑐2 … 𝑐𝑘;
➢ 对每一个样本,计算与每个中心点之间的距离,取最小的作为它的归类;
➢ 重新计算每个类的中心点。
➢ 如果每个中心点都变化很小,则算法收敛,退出;否则重复进行。

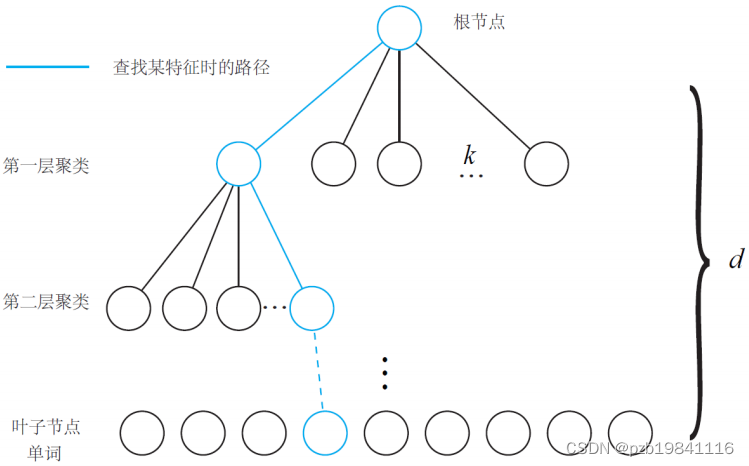
字典的结构
➢ 当实际拿到一个特征时,需要查询它对应的Word是什么
➢ 遍历比较: 𝑂(𝑛)
➢ 建立字典结构可以加速比较,比如KD Tree
word 的相似度测量
用到了TF-IDF,本质上是信息论的那一套

两个词之间的相似度测量

找到相似帧之后的处理方式。
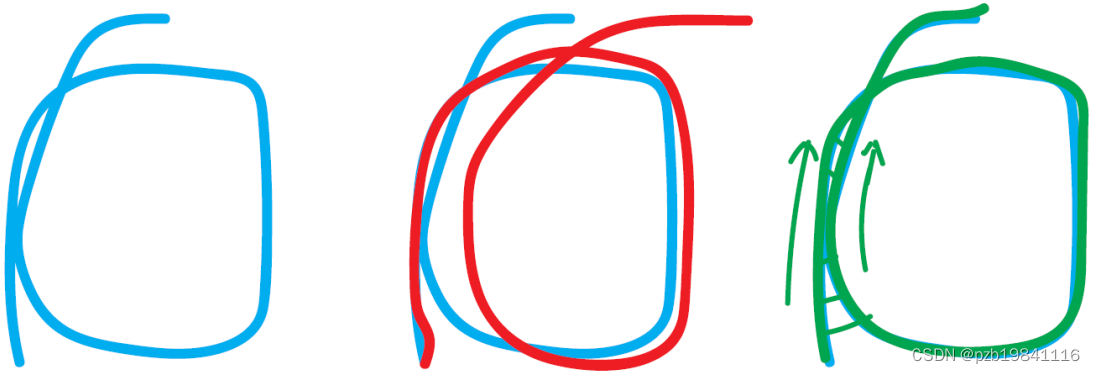
SLAM 中的回环检测
➢ 使用相对的评分而非绝对的评分
➢ 思路:相邻关键帧是相似的,而回环的相似度应该约等于相邻关键帧
检测成功以后:
➢ 根据 PnP 等算法计算运动关系
➢ 根据重投影关系验证回环是否成立
➢ 利用全局 BA 或 Pose Graph 进行优化
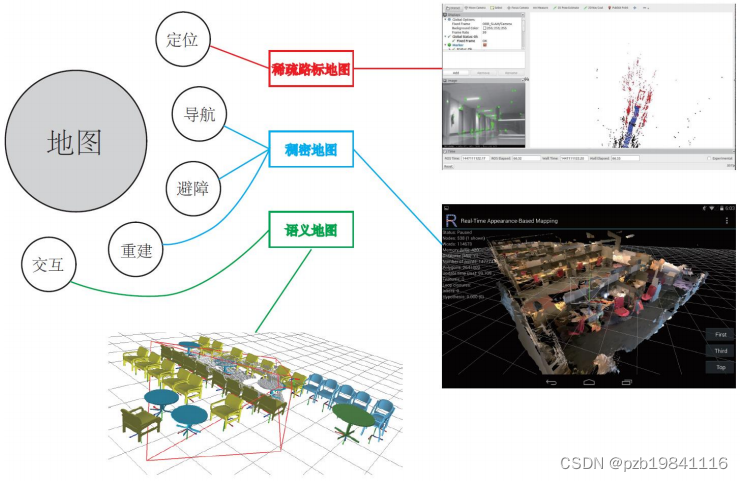
建图,实际当中地图往往有不同形式,对应不同需求。
➢ 定位仅需匹配特征点
➢ 导航和避障需要稠密障碍物信息
➢ 交互需要稠密的物体表面信息
➢ 高层任务需要语义信息
单目的稠密建图
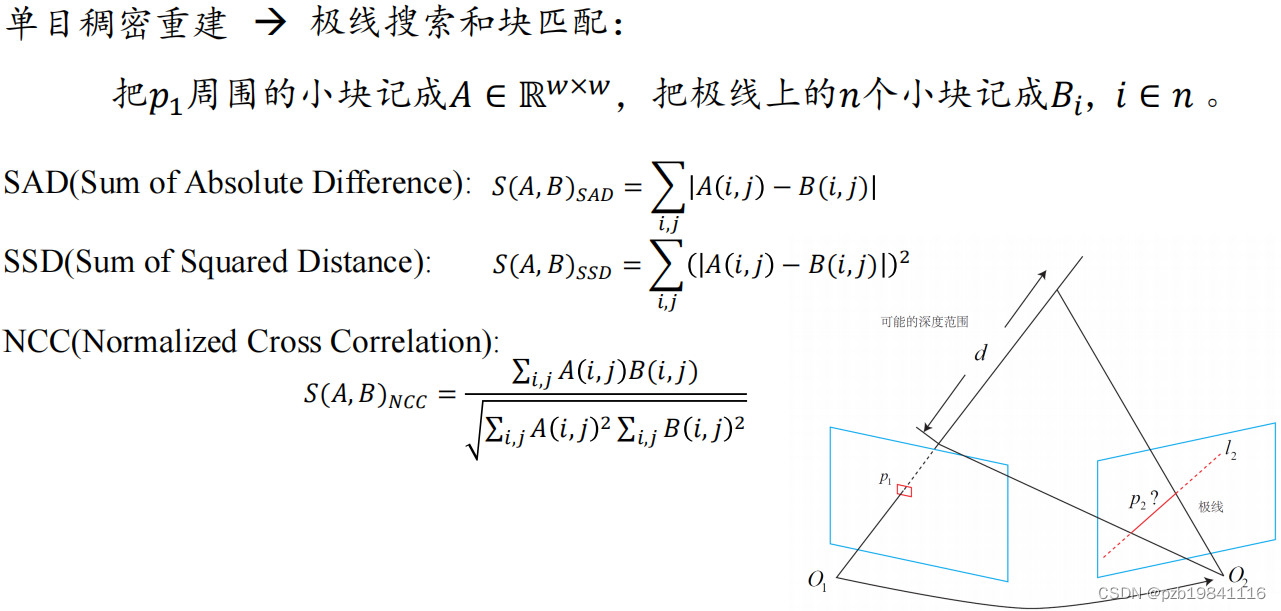
构建的一般为点云数据类型的地图
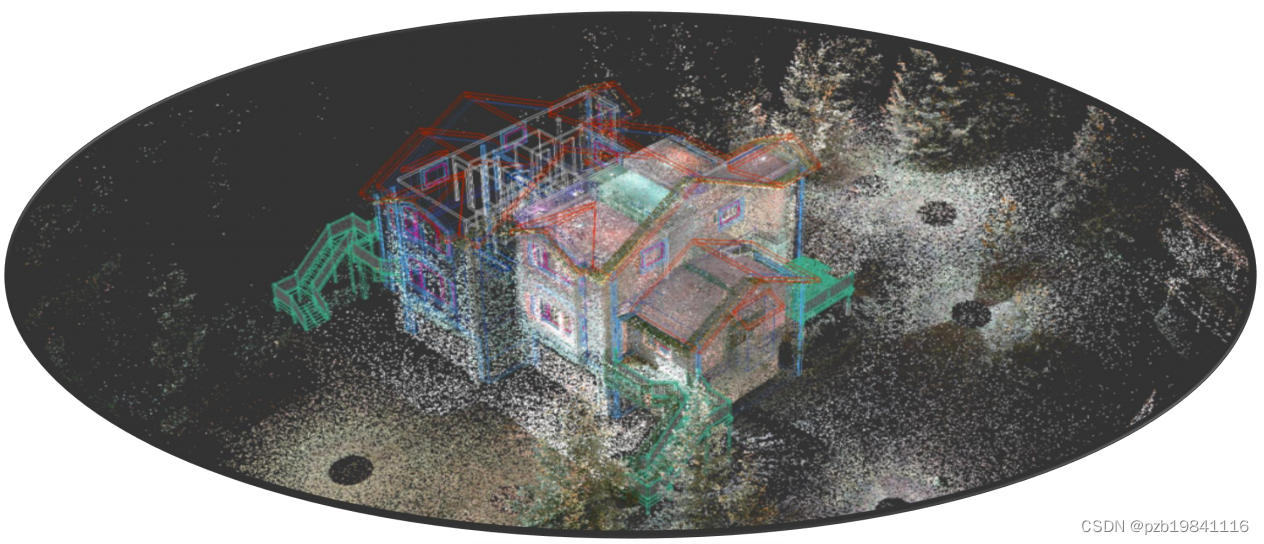
后续包括泊松重建和Surfel重建等

还有Octomap等,可以降低点云的数据量
重要的开源SLAM,很好的学习材料。
GitHub - raulmur/ORB_SLAM2: Real-Time SLAM for Monocular, Stereo and RGB-D Cameras, with Loop Detection and Relocalization Capabilities