#导入工具包
import numpy as np
import argparse
import imutils
import cv2# 设置参数
ap = argparse.ArgumentParser()
ap.add_argument("-i", "--image", required=True,help="path to the input image")
args = vars(ap.parse_args())# 正确答案
ANSWER_KEY = {0: 1, 1: 4, 2: 0, 3: 3, 4: 1}def order_points(pts):# 一共4个坐标点rect = np.zeros((4, 2), dtype = "float32")# 按顺序找到对应坐标0123分别是 左上,右上,右下,左下# 计算左上,右下s = pts.sum(axis = 1)rect[0] = pts[np.argmin(s)]rect[2] = pts[np.argmax(s)]# 计算右上和左下diff = np.diff(pts, axis = 1)rect[1] = pts[np.argmin(diff)]rect[3] = pts[np.argmax(diff)]return rectdef four_point_transform(image, pts):# 获取输入坐标点rect = order_points(pts)(tl, tr, br, bl) = rect# 计算输入的w和h值widthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))maxWidth = max(int(widthA), int(widthB))heightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))maxHeight = max(int(heightA), int(heightB))# 变换后对应坐标位置dst = np.array([[0, 0],[maxWidth - 1, 0],[maxWidth - 1, maxHeight - 1],[0, maxHeight - 1]], dtype = "float32")# 计算变换矩阵M = cv2.getPerspectiveTransform(rect, dst)warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))# 返回变换后结果return warped
def sort_contours(cnts, method="left-to-right"):reverse = Falsei = 0if method == "right-to-left" or method == "bottom-to-top":reverse = Trueif method == "top-to-bottom" or method == "bottom-to-top":i = 1boundingBoxes = [cv2.boundingRect(c) for c in cnts](cnts, boundingBoxes) = zip(*sorted(zip(cnts, boundingBoxes),key=lambda b: b[1][i], reverse=reverse))return cnts, boundingBoxes
def cv_show(name,img):cv2.imshow(name, img)cv2.waitKey(0)cv2.destroyAllWindows() # 预处理
image = cv2.imread(args["image"])
contours_img = image.copy()
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
cv_show('blurred',blurred)
edged = cv2.Canny(blurred, 75, 200)
cv_show('edged',edged)# 轮廓检测
cnts = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)[0]
cv2.drawContours(contours_img,cnts,-1,(0,0,255),3)
cv_show('contours_img',contours_img)
docCnt = None# 确保检测到了
if len(cnts) > 0:# 根据轮廓大小进行排序cnts = sorted(cnts, key=cv2.contourArea, reverse=True)# 遍历每一个轮廓for c in cnts:# 近似peri = cv2.arcLength(c, True)approx = cv2.approxPolyDP(c, 0.02 * peri, True)# 准备做透视变换if len(approx) == 4:docCnt = approxbreak# 执行透视变换warped = four_point_transform(gray, docCnt.reshape(4, 2))
cv_show('warped',warped)
# Otsu's 阈值处理
thresh = cv2.threshold(warped, 0, 255,cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1]
cv_show('thresh',thresh)
thresh_Contours = thresh.copy()
# 找到每一个圆圈轮廓
cnts = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)[0]
cv2.drawContours(thresh_Contours,cnts,-1,(0,0,255),3)
cv_show('thresh_Contours',thresh_Contours)
questionCnts = []# 遍历
for c in cnts:# 计算比例和大小(x, y, w, h) = cv2.boundingRect(c)ar = w / float(h)# 根据实际情况指定标准if w >= 20 and h >= 20 and ar >= 0.9 and ar <= 1.1:questionCnts.append(c)# 按照从上到下进行排序
questionCnts = sort_contours(questionCnts,method="top-to-bottom")[0]
correct = 0# 每排有5个选项
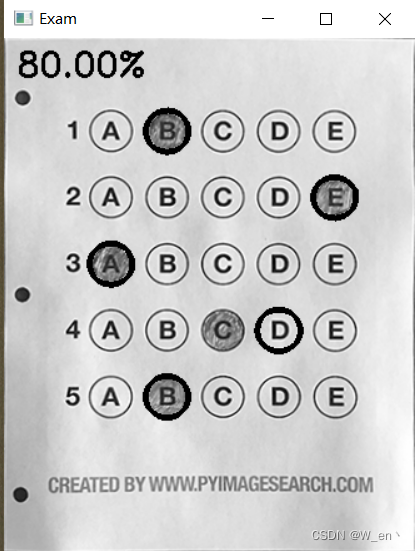
for (q, i) in enumerate(np.arange(0, len(questionCnts), 5)):# 排序cnts = sort_contours(questionCnts[i:i + 5])[0]bubbled = None# 遍历每一个结果for (j, c) in enumerate(cnts):# 使用mask来判断结果mask = np.zeros(thresh.shape, dtype="uint8")cv2.drawContours(mask, [c], -1, 255, -1) #-1表示填充cv_show('mask',mask)# 通过计算非零点数量来算是否选择这个答案mask = cv2.bitwise_and(thresh, thresh, mask=mask)total = cv2.countNonZero(mask)# 通过阈值判断if bubbled is None or total > bubbled[0]:bubbled = (total, j)# 对比正确答案color = (0, 0, 255)k = ANSWER_KEY[q]# 判断正确if k == bubbled[1]:color = (0, 255, 0)correct += 1# 绘图cv2.drawContours(warped, [cnts[k]], -1, color, 3)score = (correct / 5.0) * 100
print("[INFO] score: {:.2f}%".format(score))
cv2.putText(warped, "{:.2f}%".format(score), (10, 30),cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 0, 255), 2)
cv2.imshow("Original", image)
cv2.imshow("Exam", warped)
cv2.waitKey(0)






![java八股文面试[JVM]——垃圾回收器](https://img-blog.csdnimg.cn/a56639a6c9c0481686b5d4b72b114552.jpeg#pic_center)