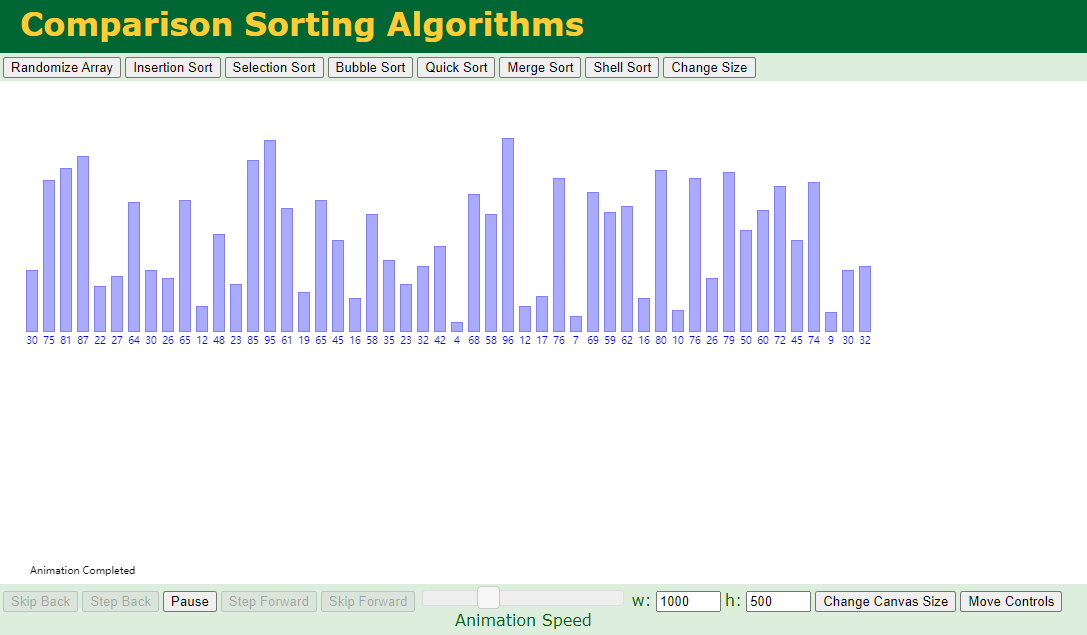
点击链接 可视化排序 动态演示各个排序算法来加深理解,大致如下
一,冒泡排序(Bubble Sort)
原理
- 冒泡排序(Bubble Sort)是一种简单的排序算法,它通过多次比较和交换相邻元素的方式,将最大(或最小)的元素逐步冒泡到数组的一端。每一轮冒泡将会将未排序部分中最大(或最小)的元素“浮”到正确的位置。
算法步骤
- 从数组的第一个元素开始,依次比较相邻的两个元素。
- 如果前一个元素比后一个元素大(或小,取决于排序顺序),则交换这两个元素。
- 继续向后遍历,对每一对相邻元素重复步骤 2。
- 重复步骤 1 到 3,直到没有元素需要交换,整个数组就是有序的。
算法实现
#include <iostream> #include <vector>// 冒泡排序 void bubbleSort(std::vector<int>& arr) {int n = arr.size();for (int i = 0; i < n - 1; ++i) {// 在每一轮中,比较相邻元素并交换for (int j = 0; j < n - i - 1; ++j) {if (arr[j] > arr[j + 1]) {std::swap(arr[j], arr[j + 1]);}}} }性能分析
- 时间复杂度:
- 冒泡排序的时间复杂度在最坏和平均情况下都为 O(n^2),其中 n 是待排序元素的数量。每次遍历需要进行 n-1 次比较,而需要执行 n-1 次遍历。
- 最好情况下,如果列表本身已经有序,冒泡排序仍然需要进行 n-1 次遍历,但由于没有发生交换,每次遍历只需要进行 n-1、n-2、...、2、1 次比较,时间复杂度为 O(n)。
- 空间复杂度:
- 冒泡排序的空间复杂度为 O(1),只需要常数级别的额外空间。
- 稳定性:
- 冒泡排序是稳定的排序算法,因为它在相邻元素比较时仅在必要时才进行交换。
二,选择排序(Selection Sort)
原理
- 选择排序(Selection Sort)是一种简单的排序算法,它将待排序数组分为已排序和未排序两部分,然后从未排序部分选择最小(或最大)的元素,与已排序部分的最后一个元素交换位置。每次交换都会将一个元素归位,直到整个数组有序。
算法步骤
- 初始时,将整个序列分为已排序和未排序两部分,已排序为空,未排序包含所有元素。
- 在未排序部分中,找到最小(或最大)的元素。
- 将找到的最小元素与未排序部分的第一个元素交换位置,将其放到已排序部分的末尾。
- 重复执行步骤 2 和 3,直到未排序部分为空,整个序列变得有序。
算法实现
#include <iostream> #include <vector>// 选择排序 void selectionSort(std::vector<int>& arr) {int n = arr.size();for (int i = 0; i < n - 1; ++i) {int minIndex = i; // 记录最小元素的索引// 在未排序部分找到最小元素的索引for (int j = i + 1; j < n; ++j) {if (arr[j] < arr[minIndex]) {minIndex = j;}}// 将最小元素与当前位置交换std::swap(arr[i], arr[minIndex]);} }性能分析
- 时间复杂度:
- 选择排序的时间复杂度在最好、最坏和平均情况下都是 O(n^2),其中 n 是待排序元素的数量。
- 空间复杂度:
- 选择排序的空间复杂度为 O(1),只需要常数级别的额外空间。
- 稳定性:
- 选择排序是不稳定的排序算法,因为在选择最小(或最大)元素的过程中,相同值的元素可能会交换位置。
三,插入排序(Insertion Sort)
原理
- 插入排序(Insertion Sort)是一种简单的排序算法,它将待排序数组分为已排序和未排序两部分,然后逐个将未排序部分的元素插入到已排序部分的正确位置,使得已排序部分始终保持有序。
算法步骤
- 初始时,将第一个元素视为已排序部分,其余元素视为未排序部分。
- 从未排序部分中取出一个元素,将其插入到已排序部分的适当位置,使得插入后的已排序部分仍然保持有序。
- 重复步骤 2,直到未排序部分为空,整个序列变得有序。
算法实现
#include <iostream> #include <vector>// 插入排序 void insertionSort(std::vector<int>& arr) {int n = arr.size();for (int i = 1; i < n; ++i) {int current = arr[i]; // 当前要插入的元素int j = i - 1; // 已排序部分的末尾索引// 将元素插入到正确位置while (j >= 0 && arr[j] > current) {arr[j + 1] = arr[j];j--;}arr[j + 1] = current;} }性能分析
- 时间复杂度:
- 插入排序的时间复杂度在最好情况下是 O(n),最坏和平均情况下是 O(n^2),其中 n 是待排序元素的数量。
- 空间复杂度:
- 插入排序的空间复杂度为 O(1),只需要常数级别的额外空间。
- 稳定性:
- 插入排序是稳定的排序算法,因为它在插入元素时相同值的元素不会改变相对顺序。
四,希尔排序(Shell Sort)
原理
- 希尔排序(Shell Sort)是一种改进的插入排序算法,它通过将数组分成多个子序列来排序,然后逐步缩小子序列的间隔,最终将整个数组排序。希尔排序的核心思想是使数组中任意间隔 h 的元素都是有序的,当 h 逐步减小到 1 时,整个数组变为有序。
算法步骤
- 选择一个增量序列(通常为递减的整数序列),例如 [n/2, n/4, n/8, ...],其中 n 是数组的长度。
- 对每个增量进行迭代,将数组分成多个子数组,每个子数组中的元素间隔为增量。
- 对每个子数组进行插入排序,将子数组中的元素插入到已排序部分的适当位置。
- 重复步骤 2 和 3,不断减小增量,直到增量为 1,此时整个数组被视为一个子数组,进行最后一次插入排序。
算法实现
#include <iostream>void shellSort(int arr[], int n) {for (int gap = n / 2; gap > 0; gap /= 2) {// 使用插入排序对子数组进行排序for (int i = gap; i < n; ++i) {int temp = arr[i];int j = i;// 移动元素,寻找插入位置while (j >= gap && arr[j - gap] > temp) {arr[j] = arr[j - gap];j -= gap;}arr[j] = temp; // 将元素插入到合适的位置}} }性能分析
- 时间复杂度:
- 希尔排序的时间复杂度依赖于所选的增量序列。最好的已知增量序列的时间复杂度是 O(n^1.3),平均情况下的时间复杂度较难分析,但它通常优于 O(n^2) (介于 O(n log n) 和 O(n^2) 之间)的插入排序。具体取决于增量序列的选择。
- 空间复杂度:
- 希尔排序的空间复杂度为 O(1),只需要常数级别的额外空间。
- 稳定性:
- 希尔排序不是稳定的排序算法,因为在交换元素的过程中可能会改变相同值元素的相对顺序。
五,归并排序(Merge Sort)
原理
- 归并排序(Merge Sort)是一种分治策略的排序算法,它将待排序数组不断划分为两个子数组,然后将这些子数组逐步合并成一个有序数组。归并排序的核心思想是将两个有序的子数组合并成一个有序的数组,这样逐步合并,最终得到整个数组有序。
算法步骤
- 分割:将待排序数组递归地分割成较小的子数组,直到每个子数组只包含一个元素。
- 合并:将两个有序的子数组合并成一个有序数组。合并过程中,分别从两个子数组中取出较小的元素,放入结果数组中。
算法实现
#include <iostream> #include <vector>// 合并两个有序子数组 void merge(std::vector<int>& arr, int left, int mid, int right) {int leftCount = mid - left + 1; // 左边子数组大小int rightCount = right - mid; // 右边子数组大小// 创建临时数组存放两个子数组的元素std::vector<int> leftArr(leftCount), rightArr(rightCount);for (int i = 0; i < leftCount; ++i)leftArr[i] = arr[left + i];for (int i = 0; i < rightCount; ++i)rightArr[i] = arr[mid + 1 + i];// 合并两个子数组int i = 0, j = 0, k = left;while (i < leftCount && j < rightCount) {if (leftArr[i] <= rightArr[j]) {arr[k++] = leftArr[i++];} else {arr[k++] = rightArr[j++];}}// 将剩余的元素拷贝到结果数组中while (i < leftCount) {arr[k++] = leftArr[i++];}while (j < rightCount) {arr[k++] = rightArr[j++];} }// 归并排序 void mergeSort(std::vector<int>& arr, int left, int right) {if (left < right) {int mid = left + (right - left) / 2;// 递归地对左右子数组进行排序mergeSort(arr, left, mid);mergeSort(arr, mid + 1, right);// 合并两个有序子数组merge(arr, left, mid, right);} }性能分析
- 时间复杂度:
- 归并排序的时间复杂度是稳定的,无论数据的分布如何,都是 O(n log n),其中 n 是待排序元素的数量。
- 空间复杂度:
- 归并排序需要额外的空间来存储临时数组,因此其空间复杂度是 O(n)。
- 稳定性:
- 归并排序是稳定的排序算法,因为在合并两个子数组时,相同值的元素不会改变相对顺序。
六,快速排序(Quick Sort)
原理
- 快速排序(Quick Sort)是一种基于分治思想的排序算法,它通过选择一个基准元素,将数组划分为小于基准和大于基准的两部分,然后递归地对这两部分进行排序。在每一次划分后,基准元素会被放置在最终的正确位置上。
算法步骤
- 选择基准元素:从数组中选择一个基准元素,通常选择第一个或最后一个元素。
- 分区:将数组划分为小于基准和大于基准的两部分,使得基准元素位于正确的位置上。
- 递归排序:对小于基准和大于基准的两部分分别递归地应用快速排序算法。
- 合并:不需要合并步骤,因为在分区过程中已经将数组划分为有序的部分。
算法实现
#include <iostream> #include <vector>// 分区函数,返回基准元素的正确位置 int partition(std::vector<int>& arr, int low, int high) {int pivot = arr[low]; // 选择第一个元素作为基准while (low < high){while (low<high && arr[high]>=pivot)--high;arr[low] = arr[high]; // 将小于基准的元素移到左边while (low<high && arr[low]<=pivot)++low;arr[high] = arr[low]; // 将大于基准的元素移到右边}// 将基准元素放到正确的位置上arr[low] = pivot;return low; // 返回存放基准的最终位置 }// 快速排序 void quickSort(std::vector<int>& arr, int low, int high) {if (low < high) {int pivotIndex = partition(arr, low, high); // 基准元素的正确位置// 对基准左边和右边的部分分别递归进行排序quickSort(arr, low, pivotIndex - 1);quickSort(arr, pivotIndex + 1, high);} }性能分析
- 时间复杂度:
- 平均情况下,快速排序的时间复杂度是 O(n log n),其中 n 是待排序元素的数量。
- 在最坏情况下(数组已经有序或接近有序),快速排序的时间复杂度可能退化到 O(n^2)。
- 空间复杂度:
- 快速排序的空间复杂度主要取决于递归调用的栈空间,通常为 O(log n)。
- 在最坏情况下,递归栈的深度可能达到 n,空间复杂度为 O(n)。
- 稳定性:
- 快速排序是不稳定的排序算法,因为在分区过程中可能改变相同元素的相对顺序。
七,堆排序(Heap Sort)
原理
- 堆排序(Heap Sort)是一种基于二叉堆的排序算法。它将待排序数组构建成一个二叉堆,然后不断从堆顶取出最大(或最小)元素,将其放置到已排序部分的末尾,直到整个数组有序。
算法步骤
- 构建最大堆:将待排序数组看作完全二叉树,从最后一个非叶子节点开始,逐步向上调整,使得每个节点都大于其子节点。
- 不断从堆顶取出最大元素:每次将堆顶元素与堆末尾元素交换,然后将堆的大小减一,再进行堆化操作,将最大元素移至正确位置。
- 重复步骤 2,直到堆中只剩一个元素,此时整个数组有序。
算法实现
#include <iostream> #include <vector>// 交换元素 void swap(int& a, int& b) {a = a + b;b = a - b;a = a - b; }// 对以 root 为根的子树进行堆化 void heapify(std::vector<int>& arr, int n, int root) {int largest = root; // 初始化最大元素为根节点while (largest < n) {int left = 2 * root + 1; // 左子节点索引int right = 2 * root + 2; // 右子节点索引// 找到左右子节点中较大的元素索引if (left < n && arr[left] > arr[largest]) {largest = left;}if (right < n && arr[right] > arr[largest]) {largest = right;}// 如果最大元素不是根节点,则交换元素if (largest != root) {swap(arr[root], arr[largest]);root = largest; // 继续向下调整} else {break; // 堆结构已经满足,退出循环}} }// 堆排序 void heapSort(std::vector<int>& arr) {int n = arr.size();// 构建大根堆,从最后一个非叶子节点开始for (int i = n / 2 - 1; i >= 0; --i) {heapify(arr, n, i);}// 逐步取出最大元素并进行堆化for (int i = n - 1; i > 0; --i) {swap(arr[0], arr[i]); // 将堆顶元素移至已排序部分的末尾heapify(arr, i, 0); // 对剩余的部分进行堆化} }性能分析
- 时间复杂度:
- 堆排序的时间复杂度在最好、最坏和平均情况下都是 O(n log n),其中 n 是待排序元素的数量。
- 空间复杂度:
- 堆排序的空间复杂度为 O(1),只需要常数级别的额外空间。
- 稳定性:
- 堆排序通常是不稳定的,因为堆化操作可能改变相同元素的相对顺序。然而,通过一些额外的操作可以实现稳定性。
八,基数排序(Counting Sort)
原理
- 基数排序(Radix Sort)是一种非比较的整数排序算法,它根据数字的每个位上的值来对元素进行排序。基数排序可以看作是桶排序的扩展,它先按照最低位进行排序,然后逐步移到更高位,直到所有位都考虑完毕。
算法步骤
- 找到最大数的位数:首先,找到待排序数组中最大数的位数,这将决定排序的轮数。
- 按位排序:从低位到高位,依次对每一位进行计数排序(或桶排序),将元素分配到不同的桶中。
- 合并桶:将每一轮排序后的桶中的元素按顺序合并成一个新的数组。
- 重复步骤 2 和 3,直到所有位都考虑完毕,得到有序数组。
算法实现
#include <iostream> #include <vector> #include <queue>// 找到数组中的最大数 int findMax(std::vector<int>& arr) {int max = arr[0];for (int num : arr) {if (num > max) {max = num;}}return max; }// 基数排序 void radixSort(std::vector<int>& arr) {int n = arr.size();int max = findMax(arr);int exp = 1; // 用于获取每个位数的值while (max / exp > 0) {// 创建桶队列,每个桶用于存放某个位数上的元素std::vector<std::queue<int>> buckets(10); // 使用10个桶,每个桶代表一个数字(0到9)// 将元素分配到桶中for (int i = 0; i < n; ++i) {int bucketIndex = (arr[i] / exp) % 10; // 计算当前位数的值,作为桶的索引buckets[bucketIndex].push(arr[i]); // 将元素放入对应的桶中}// 从桶中取回元素到原数组int index = 0;for (int i = 0; i < 10; ++i) {while (!buckets[i].empty()) {arr[index++] = buckets[i].front(); // 取出队列头部元素,放入原数组buckets[i].pop(); // 弹出队列头部元素}}exp *= 10; // 移到下一个位数} }性能分析
- 时间复杂度:
- 基数排序的时间复杂度取决于位数和基数的大小。对于位数为 k,基数为 r 的情况,时间复杂度为 O(k * (n + r))。
- 空间复杂度:
- 基数排序的空间复杂度为 O(n + r),其中 n 是待排序元素的数量,r 是基数的大小。
- 稳定性:
- 基数排序是稳定的排序算法,因为在同一位数上的排序时,相同值元素的相对顺序不会改变。
![[Linux]命令行参数和进程优先级](https://img-blog.csdnimg.cn/img_convert/19270880a25074f42260e9062c83a050.png)