
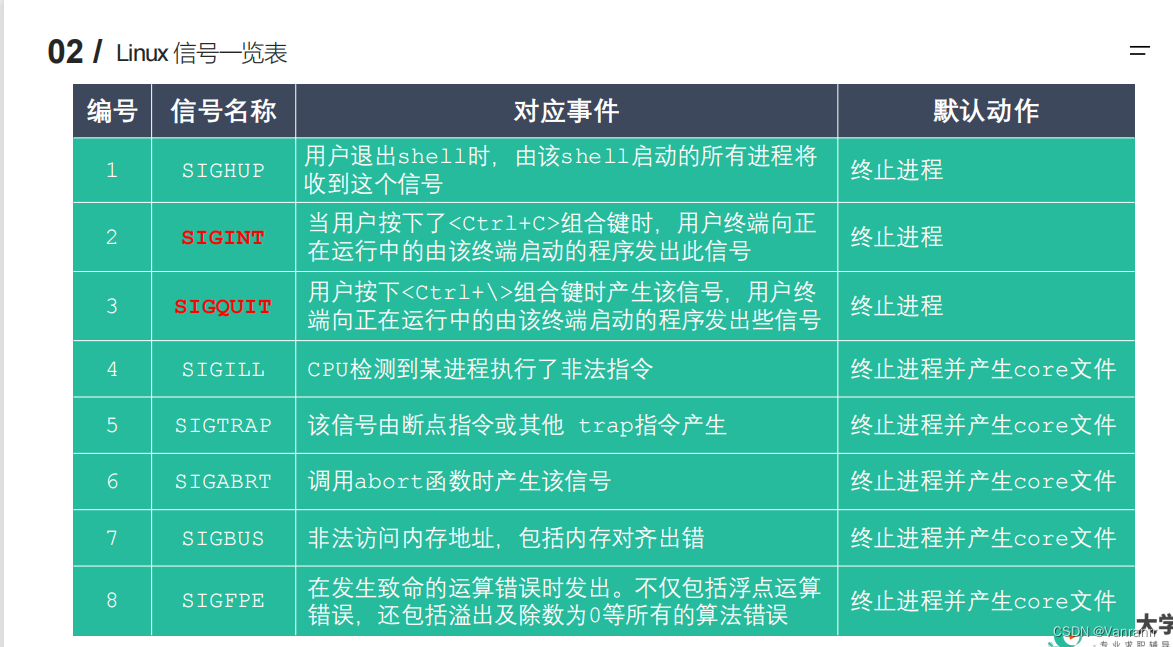
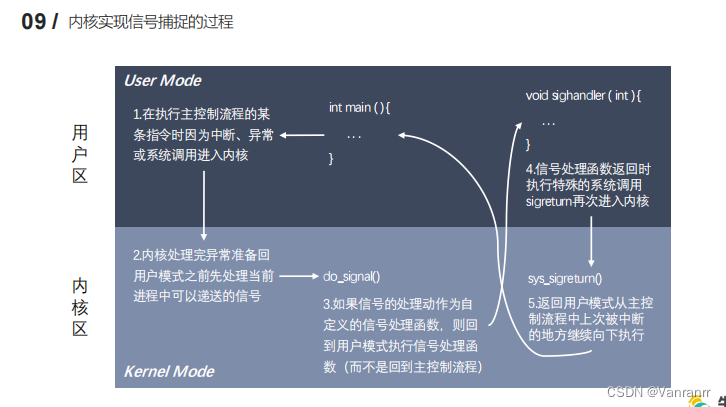
软件中断:


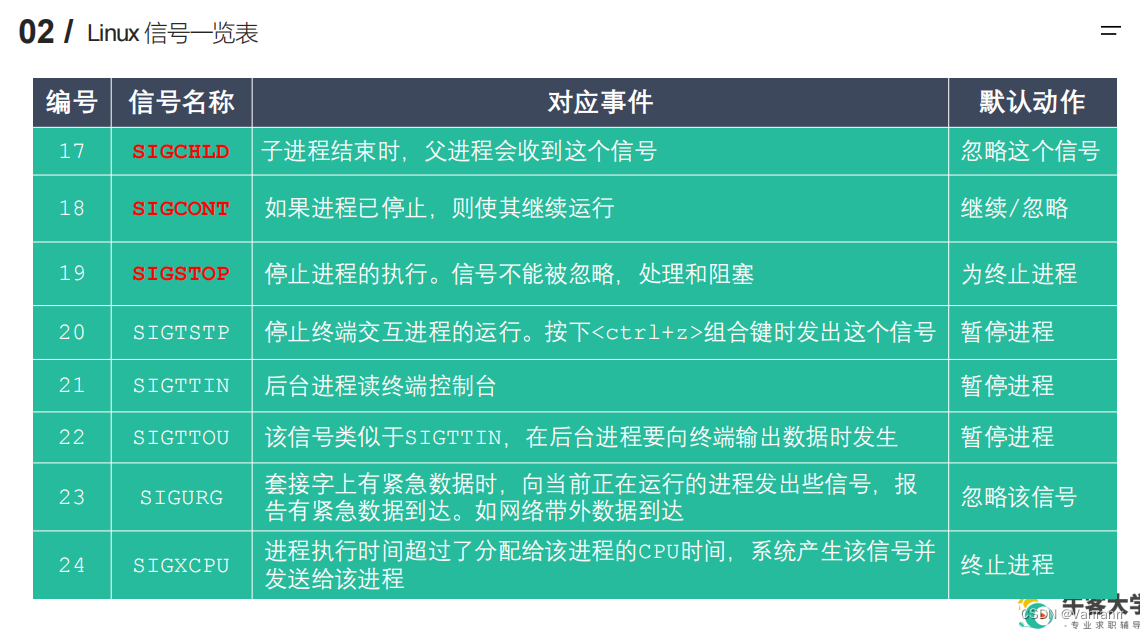
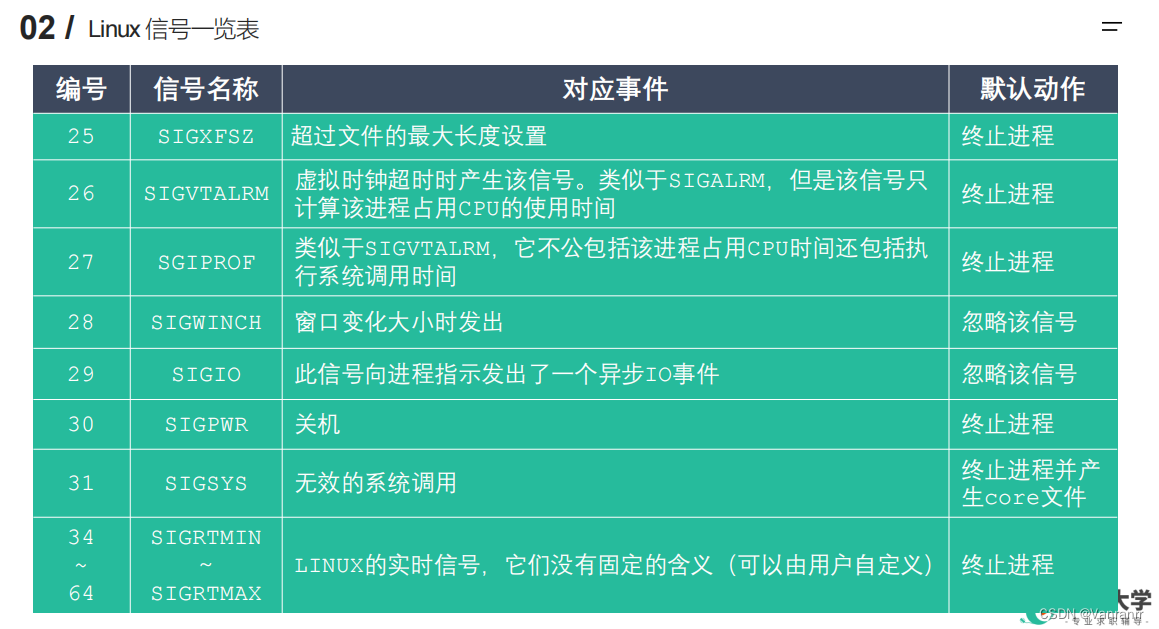
信号名称(宏不会变),编号在不同的版本可能会变:
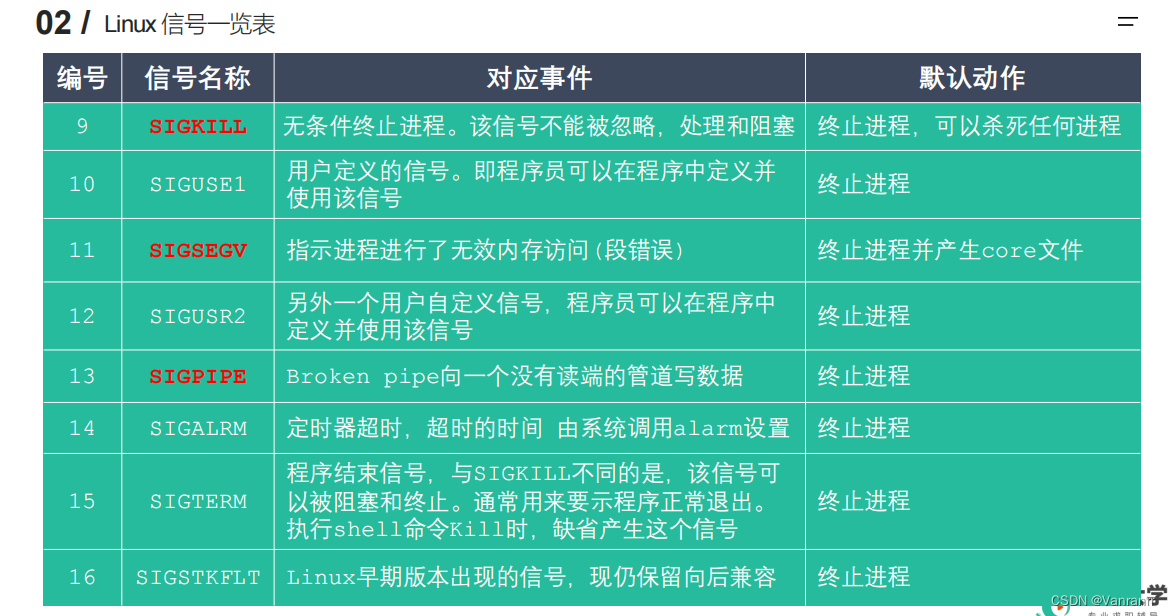
core保存进程异常退出的信息:


core.c:
#include <stdio.h>
#include <string.h>int main() {char * buf; // 指针 没有指向合法的内存 会产生段错误strcpy(buf, "hello");return 0;
}
kill.c:
/* #include <sys/types.h>#include <signal.h>int kill(pid_t pid, int sig);- 功能:给任何的进程或者进程组pid, 发送任何的信号 sig- 参数:- pid :> 0 : 将信号发送给指定的进程= 0 : 将信号发送给当前的进程组= -1 : 将信号发送给每一个有权限接收这个信号的进程< -1 : 这个pid=某个进程组的ID取反 (-12345)- sig : 需要发送的信号的编号或者是宏值,0表示不发送任何信号 编号可能会变 但宏值不会变kill(getppid(), 9);kill(getpid(), 9);int raise(int sig);- 功能:给当前进程发送信号- 参数:- sig : 要发送的信号- 返回值:- 成功 0- 失败 非0kill(getpid(), sig); void abort(void);- 功能: 发送SIGABRT信号给当前的进程,杀死当前进程kill(getpid(), SIGABRT);
*///演示kill
#include <stdio.h>
#include <sys/types.h>
#include <signal.h>
#include <unistd.h>int main() {pid_t pid = fork();if(pid == 0) { //多进程是去抢夺CPU的执行权 父进程先执行还是子进程先执行 要抢占// 子进程int i = 0;for(i = 0; i < 5; i++) {printf("child process\n");sleep(1);}} else if(pid > 0) {// 父进程printf("parent process\n");sleep(2);printf("kill child process now\n");kill(pid, SIGINT);}return 0;
}alarm.c: 只能定时一次
alarm作为定时器:时间过后,终止进程,返回剩余时间,每个进程只有一个定时器,想要停止定时器(传递个0)
// 1秒钟电脑能数多少个数?
#include <stdio.h>
#include <unistd.h>/*实际的时间 = 内核时间 + 用户时间 + 消耗的时间进行文件IO操作的时候比较浪费时间定时器,与进程的状态无关(自然定时法)。无论进程处于什么状态,alarm都会计时。
*/int main() { alarm(1);int i = 0;while(1) {printf("%i\n", i++);}return 0;
}
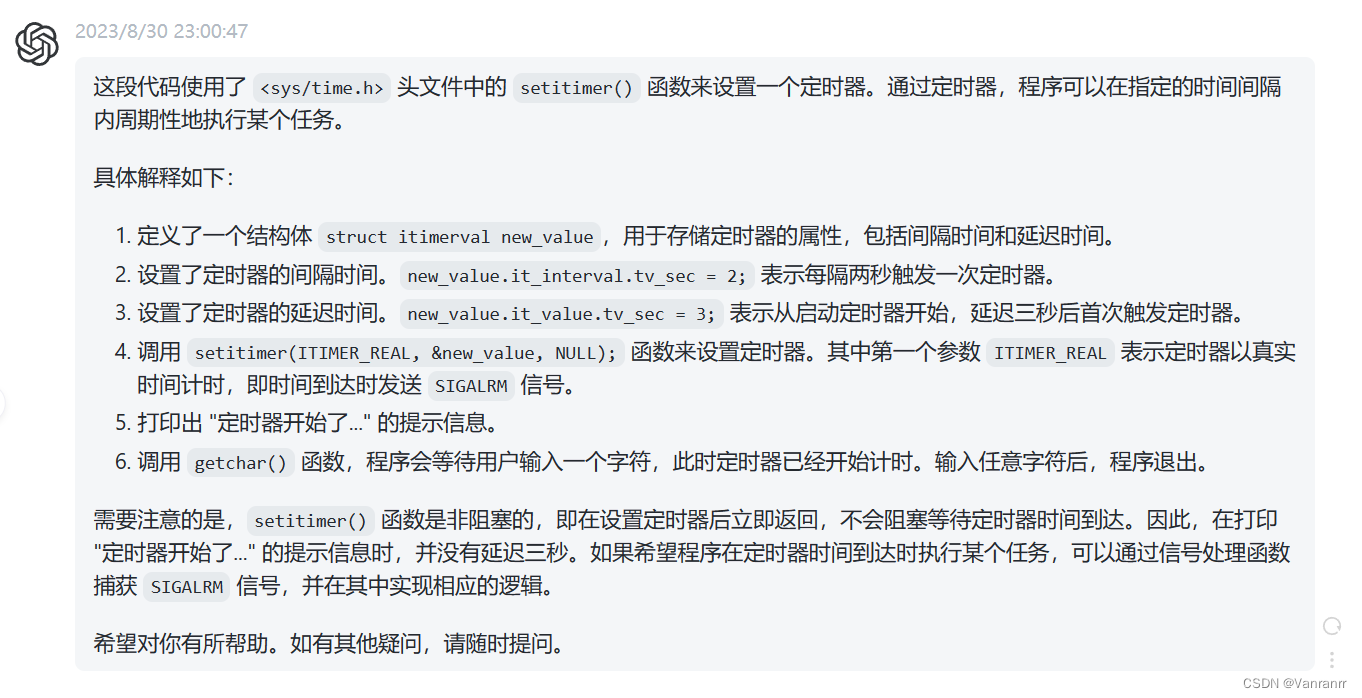
setitimer.c:(读音:set i timer) 与alarm的区别是能周期性定时
/*#include <sys/time.h>int setitimer(int which, const struct itimerval *new_value,struct itimerval *old_value);- 功能:设置定时器(闹钟)。可以替代alarm函数。精度微妙us,可以实现周期性定时- 参数:- which : 定时器以什么时间计时ITIMER_REAL: 真实时间,时间到达,发送 SIGALRM 常用ITIMER_VIRTUAL: 用户时间,时间到达,发送 SIGVTALRMITIMER_PROF: 以该进程在用户态和内核态下所消耗的时间来计算,时间到达,发送 SIGPROF- new_value: 设置定时器的属性 是个结构体struct itimerval { // 定时器的结构体struct timeval it_interval; // 每个阶段的时间,间隔(interval)时间struct timeval it_value; // 延迟多长时间执行定时器};struct timeval { // 时间的结构体time_t tv_sec; // 秒数 suseconds_t tv_usec; // 微秒 };过10秒后,每个2秒定时一次- old_value :记录上一次的定时的时间参数,一般不使用,指定NULL- 返回值:成功 0失败 -1 并设置错误号
*/#include <sys/time.h>
#include <stdio.h>
#include <stdlib.h>// 过3秒以后,每隔2秒钟定时一次
int main() {struct itimerval new_value;// 设置间隔的时间new_value.it_interval.tv_sec = 2;new_value.it_interval.tv_usec = 0;// 设置延迟的时间,3秒之后开始第一次定时new_value.it_value.tv_sec = 3;new_value.it_value.tv_usec = 0;int ret = setitimer(ITIMER_REAL, &new_value, NULL); // 非阻塞的 ITIMER_REAL 默认去终止进程,所以没法周期性定时,需要信号捕捉,才能周期性定时printf("定时器开始了...\n"); //他立马打印,并没有延迟三秒,说明是非阻塞的if(ret == -1) {perror("setitimer");exit(0);}getchar();return 0;
}
signal.c:
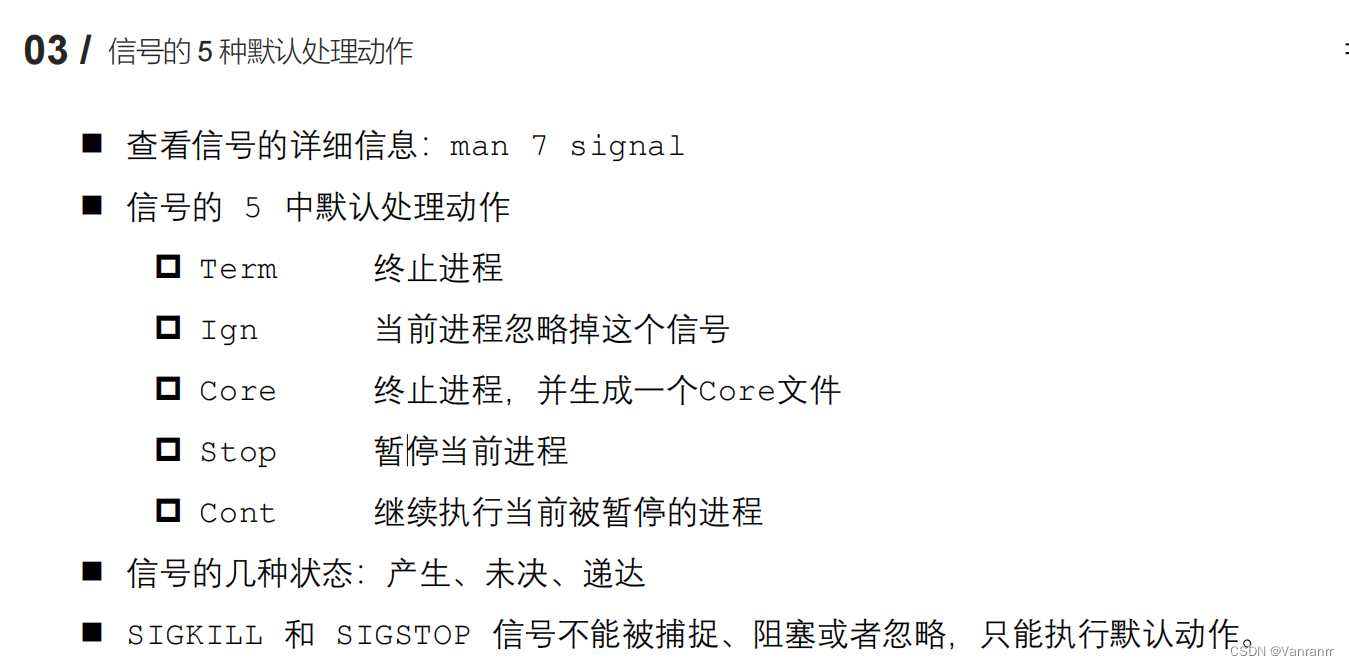
/*#include <signal.h>typedef void (*sighandler_t)(int);sighandler_t signal(int signum, sighandler_t handler);- 功能:设置某个信号的捕捉行为- 参数:- signum: 要捕捉的信号- handler: 捕捉到信号要如何处理- SIG_IGN : 忽略信号- SIG_DFL : 使用信号默认的行为 (相当于没有捕捉)- 回调函数 : 这个函数是内核调用,程序员只负责写,捕捉到信号后如何去处理信号。回调函数:- 需要程序员实现,提前准备好的,函数的类型根据实际需求,看函数指针的定义- 不是程序员调用,而是当信号产生,由内核调用- 函数指针是实现回调的手段,函数实现之后,将函数名放到函数指针的位置就可以了。- 返回值:成功,返回上一次注册的信号处理函数的地址。第一次调用返回NULL失败,返回SIG_ERR,设置错误号SIGKILL(强制杀死某个进程,要是能捕捉,可以搞病毒了) SIGSTOP不能被捕捉,不能被忽略。
*/#include <sys/time.h>
#include <stdio.h>
#include <stdlib.h>
#include <signal.h>void myalarm(int num) {printf("捕捉到了信号的编号是:%d\n", num);printf("xxxxxxx\n");
}// 过3秒以后,每隔2秒钟定时一次
int main() {// 注册信号捕捉 要写在最前面// signal(SIGALRM, SIG_IGN);// signal(SIGALRM, SIG_DFL);// void (*sighandler_t)(int); 函数指针,int类型的参数表示捕捉到的信号的值。signal(SIGALRM, myalarm);struct itimerval new_value;// 设置间隔的时间new_value.it_interval.tv_sec = 2;new_value.it_interval.tv_usec = 0;// 设置延迟的时间,3秒之后开始第一次定时new_value.it_value.tv_sec = 3;new_value.it_value.tv_usec = 0;int ret = setitimer(ITIMER_REAL, &new_value, NULL); // 非阻塞的printf("定时器开始了...\n");if(ret == -1) {perror("setitimer");exit(0);}getchar();return 0;
}


回调函数:
回调函数(Callback Function)是一种特殊类型的函数,它作为参数传递给另一个函数,并在特定的事件发生或条件满足时由另一个函数来调用。当满足一定条件时,被调用的函数将执行特定的操作或逻辑。
回调函数的使用可以实现灵活的控制流和事件处理机制。常见的应用场景包括事件驱动编程、异步编程、GUI 编程以及处理回调接口等。
回调函数的特点如下:
函数作为参数传递:回调函数通常作为另一个函数的参数传递。这样,调用者可以决定在何时调用回调函数。
非阻塞执行:回调函数通常在某个事件触发或条件满足时被调用,因此不会阻塞程序的执行。
逻辑分离:将特定的操作或逻辑封装在回调函数中,可以使代码更加模块化和可维护。
具体来说,回调函数的用法如下:
定义回调函数:编写一个函数,其中包含特定的操作或逻辑,用于在特定条件下被调用。
注册回调函数:将回调函数作为参数传递给另一个函数,并在合适的时机注册该回调函数。
触发回调:当满足特定的条件时,调用者会触发回调函数,从而执行相应的操作。
回调函数通常用于异步编程、事件处理和处理非线性控制流等情况下。通过使用回调函数,可以将程序的控制权交给调用者,使得程序能够更加灵活和可扩展。


![java八股文面试[数据库]——数据库三范式](https://img-blog.csdnimg.cn/61e2b453d02640cc9f193e9ccdac1f4f.png)