💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码及文章

💥1 概述
本文分为6章
- 第 1 章 基础知识: 它涵盖了运行仿真和了解差速移动机器人的基本运动学的所有基础知识。
- 第2章 传感器: 在本章中,将学习如何实现测程法、激光雷达、物体检测等传感器以及用于避障的 VFH 等算法。
- 第三章 路径规划: 在本课中,您将学习如何规划路径以及如何使用 RRT* 算法使机器人遵循路径(路径跟踪)。
-
第四章 前几章小结: 在本课中,您将学习如何将所有内容组合在一起并减少前几节课中的代码。
-
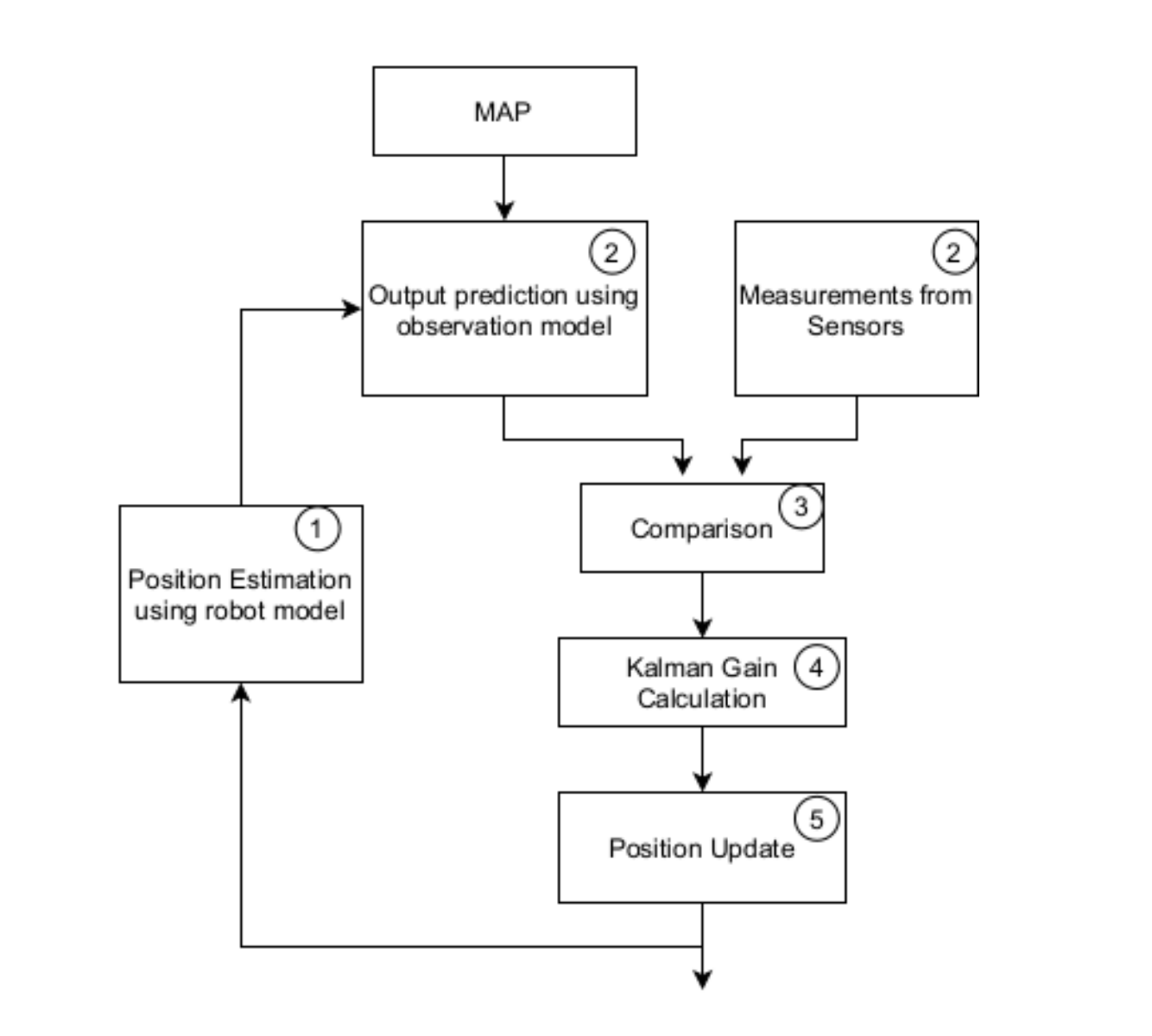
第 5 章 本地化: 在本章中,您将了解为什么需要本地化系统,然后您将实现扩展卡尔曼滤波器,了解每个步骤的理论。您可以在文件Lecture_Kalman_filter_robots.pdf中找到详细说明。
- 第6章 ROS本地化: 在本课中,我们将向您展示本地化系统如何与 MATLAB 和 ROS 一起工作。您将学习如何使用 ROSBAG 使用正确的 EKF 参数。
- 可以使用不同的算法,地图(地图文件夹)和更改参数来练习,以在不同的环境和情况下进行练习。
-
移动机器人的定位是机器人导航和路径规划的关键问题之一。传统的定位方法包括里程计、惯性导航和全球定位系统(GPS),但这些方法在室内或复杂环境中存在一定的局限性。
近年来,研究人员提出了使用环境中的视觉地标和扩展卡尔曼滤波器(EKF)来定位移动机器人的方法。这种方法利用环境中的视觉地标作为参考点,通过机器人的视觉传感器来检测和识别这些地标,并利用它们的位置信息来估计机器人的位置。
扩展卡尔曼滤波器是一种常用的滤波器,用于估计系统的状态。在移动机器人定位中,EKF可以将视觉地标的位置信息与机器人的运动模型相结合,通过迭代更新机器人的位置估计值。这样,即使视觉地标的检测和识别存在一定的误差,EKF也能够通过状态估计来减小这些误差,提高定位的准确性。
使用环境中的视觉地标和扩展卡尔曼滤波器定位移动机器人的研究可以应用于室内导航、自动驾驶等领域。通过合理选择视觉地标和优化EKF的参数,可以实现高精度的机器人定位。此外,还可以结合其他传感器,如激光雷达、超声波传感器等,来进一步提高定位的鲁棒性和可靠性。
总之,使用环境中的视觉地标和扩展卡尔曼滤波器定位移动机器人的研究是一个具有挑战性和广泛应用前景的领域,对于实现智能机器人的自主导航和定位具有重要意义。

📚2 运行结果

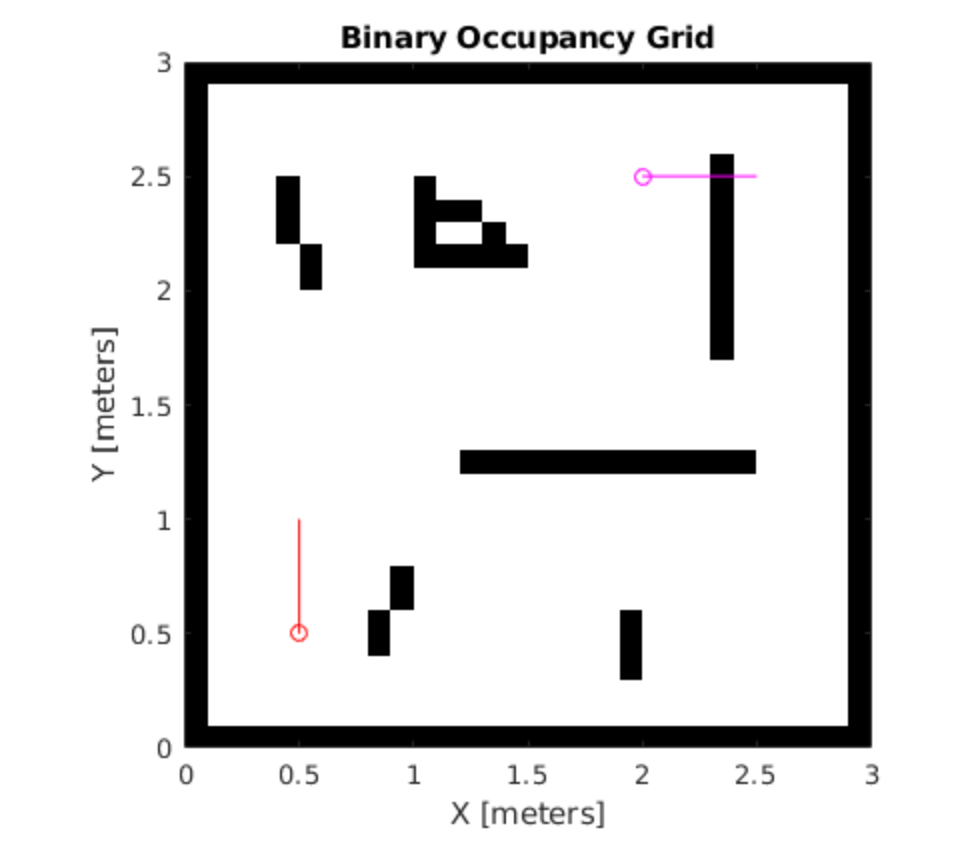
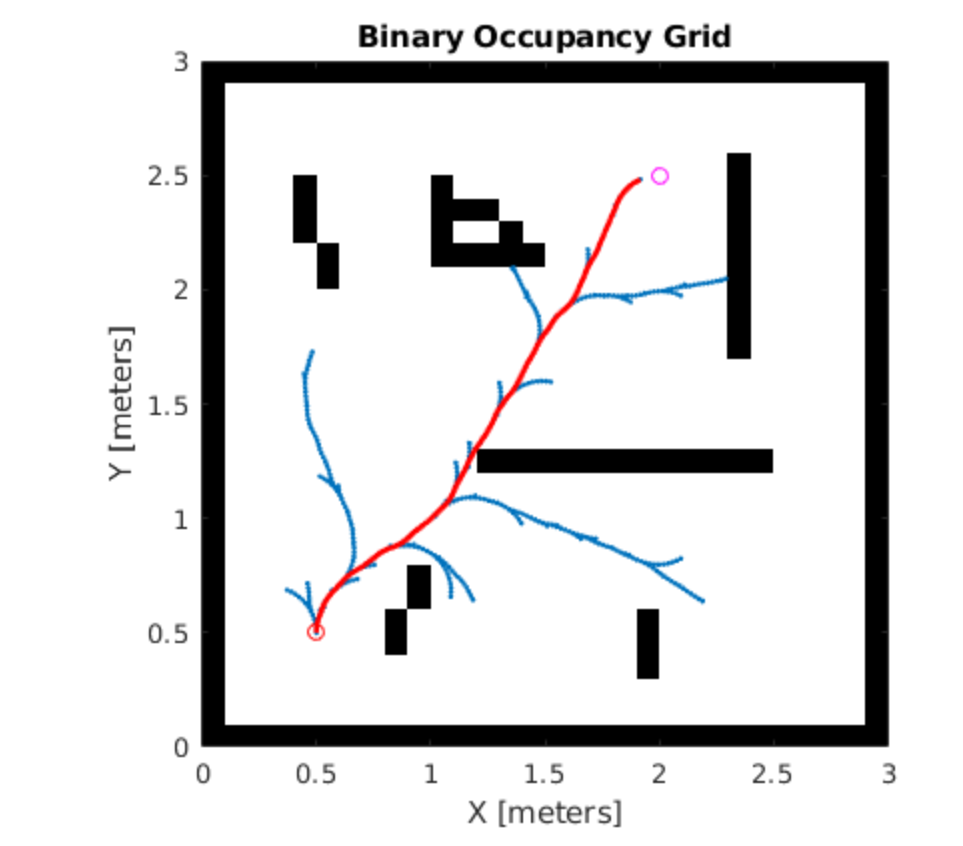
由于结果图比较多,这里仅展现3张。
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]孟祥萍,张本法,苑全德.自适应扩展卡尔曼滤波器在移动机器人定位中的应用[J].计算机系统应用, 2015, 24(12):6.DOI:10.3969/j.issn.1003-3254.2015.12.027.
[2]时也,吴怀宇,徐文霞,等.基于扩展卡尔曼滤波器的移动机器人SLAM研究[J].电子设计工程, 2012, 20(1):3.DOI:10.3969/j.issn.1674-6236.2012.01.039.

![[C/C++]指针详讲-让你不在害怕指针](https://img-blog.csdnimg.cn/79e2f0cd769945f5b326f0c2dcb85c74.jpeg)