本文通过 VINS-Fusion 的里程计信息为 PX4 提供视觉信息,从而达到 视觉定高和定点 的目的
主要工作为创建一个将 vins 里程计信息发布给 Mavros 的 /mavros/vision_pose/pose 话题
首先创建一个工作空间
mkdir -p ~/catkin_ws/src/vision_to_mavros/src/
cd ~/catkin_ws/src/vision_to_mavros/src/然后创建一个名为 vision_to_mavros 的功能包
catkin_create_pkg vision_to_mavros roscpp std_msgs geometry_msgs mavros_msgs nav_msgs tf2_eigen tf在 ~/catkin_ws/src/vision_to_mavros/src/vision_to_mavros/src/ 目录下创建一个 vision_to_mavros 节点,其内容如下
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <nav_msgs/Odometry.h>
#include <Eigen/Eigen>Eigen::Vector3d p_vins;
Eigen::Quaterniond q_vins;void vins_callback(const nav_msgs::Odometry::ConstPtr &msg)
{if(msg->header.frame_id == "world"){// // vins 的坐标轴方向, y 轴朝前, x 轴朝右, z 轴朝上// p_vins = Eigen::Vector3d(msg->pose.pose.position.x, msg->pose.pose.position.y, msg->pose.pose.position.z);// q_vins = Eigen::Quaterniond(msg->pose.pose.orientation.w, msg->pose.pose.orientation.x, msg->pose.pose.orientation.y, msg->pose.pose.orientation.z);// vins 的坐标轴方向, y 轴朝前, x 轴朝右, z 轴朝上// 转化为 x 轴朝前, y 轴朝左, z 轴朝上p_vins = Eigen::Vector3d(msg->pose.pose.position.y, -msg->pose.pose.position.x, msg->pose.pose.position.z);q_vins = Eigen::Quaterniond(msg->pose.pose.orientation.w, msg->pose.pose.orientation.x, msg->pose.pose.orientation.y, msg->pose.pose.orientation.z);Eigen::AngleAxisd roll(M_PI/2,Eigen::Vector3d::UnitX()); // 绕 x 轴旋转 pi / 2Eigen::AngleAxisd pitch(0,Eigen::Vector3d::UnitY());Eigen::AngleAxisd yaw(0,Eigen::Vector3d::UnitZ());Eigen::Quaterniond _q_vins = roll * pitch * yaw;q_vins = q_vins * _q_vins;}
}int main(int argc, char **argv)
{ros::init(argc, argv, "vins_to_mavros");ros::NodeHandle nh("~");ros::Subscriber slam_sub = nh.subscribe<nav_msgs::Odometry>("odom", 100, vins_callback);ros::Publisher vision_pub = nh.advertise<geometry_msgs::PoseStamped>("vision_pose", 10);// the setpoint publishing rate MUST be faster than 2Hzros::Rate rate(20.0);ros::Time last_request = ros::Time::now();while(ros::ok()){geometry_msgs::PoseStamped vision;vision.pose.position.x = p_vins[0];vision.pose.position.y = p_vins[1];vision.pose.position.z = p_vins[2];vision.pose.orientation.x = q_vins.x();vision.pose.orientation.y = q_vins.y();vision.pose.orientation.z = q_vins.z();vision.pose.orientation.w = q_vins.w();vision.header.stamp = ros::Time::now();vision_pub.publish(vision);ROS_INFO("\nposition:\n x: %.18f\n y: %.18f\n z: %.18f\norientation:\n x: %.18f\n y: %.18f\n z: %.18f\n w: %.18f", \p_vins[0],p_vins[1],p_vins[2],q_vins.x(),q_vins.y(),q_vins.z(),q_vins.w());ros::spinOnce();rate.sleep();}return 0;
}
然后在 ~/catkin_ws/src/vision_to_mavros/src/vision_to_mavros/launch/ 下创建一个 launch 文件用于启动该节点,其内容如下
<launch><node pkg="vision_to_mavros" type="vins_to_mavros_node" name="vins_to_mavros" output="screen"><remap from="~vision_pose" to="/mavros/vision_pose/pose" /><remap from="~odom" to="/vins_estimator/odometry" /></node>
</launch>最后配置 CMakeList.txt 文件,在相应位置添加两行
add_executable(vins_to_mavros_node src/vins_to_mavros.cpp)
target_link_libraries(vins_to_mavros_node${catkin_LIBRARIES}
)完成后编译该功能包
cd ~/catkin_ws/src/vision_to_mavros/
catkin_make编译完成后启动 d435i 相机和 vins 节点,以及刚刚编译好的 vision_to_mavros 功能包
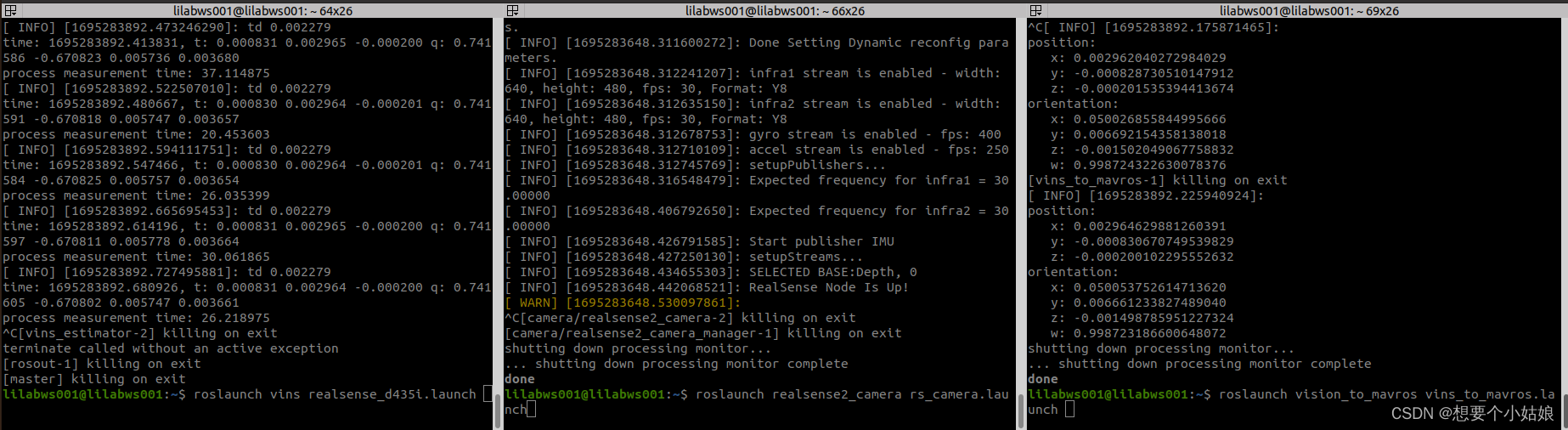
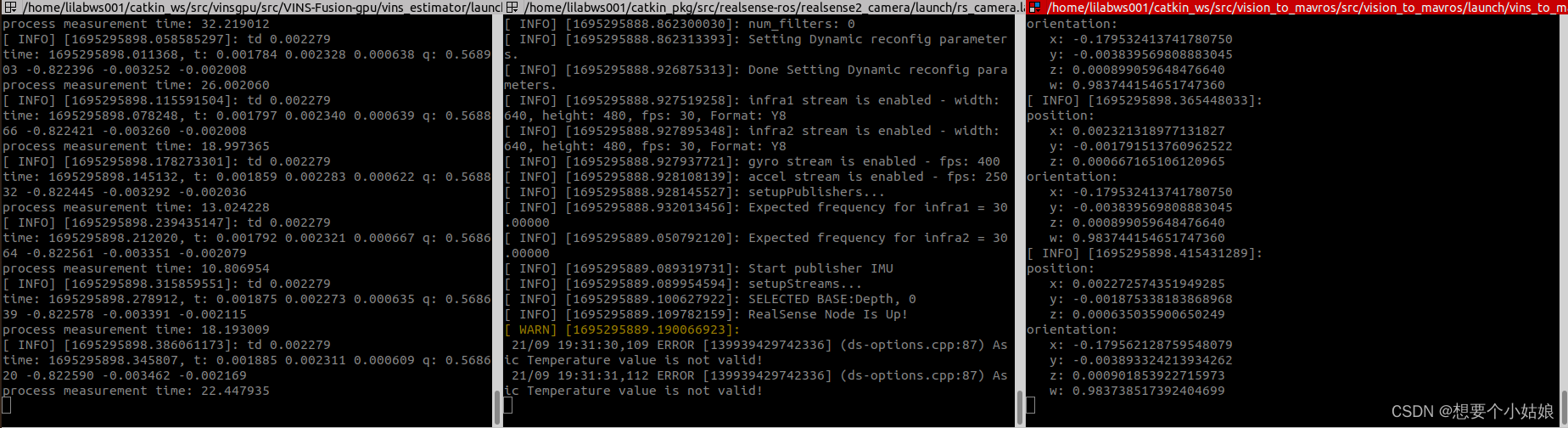
注意到 vision_to_mavros 节点已经开始打印位置信息了
输入 rostopic list 打印当前话题
lilabws001@lilabws001:~$ rostopic list
/camera/accel/imu_info
/camera/gyro/imu_info
/camera/imu
/camera/infra1/camera_info
/camera/infra1/image_rect_raw
/camera/infra1/image_rect_raw/compressed
/camera/infra1/image_rect_raw/compressed/parameter_descriptions
/camera/infra1/image_rect_raw/compressed/parameter_updates
/camera/infra1/image_rect_raw/compressedDepth
/camera/infra1/image_rect_raw/compressedDepth/parameter_descriptions
/camera/infra1/image_rect_raw/compressedDepth/parameter_updates
/camera/infra1/image_rect_raw/theora
/camera/infra1/image_rect_raw/theora/parameter_descriptions
/camera/infra1/image_rect_raw/theora/parameter_updates
/camera/infra1/metadata
/camera/infra2/camera_info
/camera/infra2/image_rect_raw
/camera/infra2/image_rect_raw/compressed
/camera/infra2/image_rect_raw/compressed/parameter_descriptions
/camera/infra2/image_rect_raw/compressed/parameter_updates
/camera/infra2/image_rect_raw/compressedDepth
/camera/infra2/image_rect_raw/compressedDepth/parameter_descriptions
/camera/infra2/image_rect_raw/compressedDepth/parameter_updates
/camera/infra2/image_rect_raw/theora
/camera/infra2/image_rect_raw/theora/parameter_descriptions
/camera/infra2/image_rect_raw/theora/parameter_updates
/camera/infra2/metadata
/camera/motion_module/parameter_descriptions
/camera/motion_module/parameter_updates
/camera/realsense2_camera_manager/bond
/camera/rgb_camera/parameter_descriptions
/camera/rgb_camera/parameter_updates
/camera/stereo_module/auto_exposure_roi/parameter_descriptions
/camera/stereo_module/auto_exposure_roi/parameter_updates
/camera/stereo_module/parameter_descriptions
/camera/stereo_module/parameter_updates
/diagnostics
/feature_tracker/feature
/mavros/vision_pose/pose
/rosout
/rosout_agg
/tf
/tf_static
/vins_estimator/camera_pose
/vins_estimator/camera_pose_right
/vins_estimator/camera_pose_visual
/vins_estimator/extrinsic
/vins_estimator/image_track
/vins_estimator/imu_propagate
/vins_estimator/key_poses
/vins_estimator/keyframe_point
/vins_estimator/keyframe_pose
/vins_estimator/margin_cloud
/vins_estimator/odometry
/vins_estimator/path
/vins_estimator/point_cloud
/vins_estimator/rectify_pose_left
/vins_estimator/rectify_pose_right我们发现已经有 /mavros/vision_pose/pose 这个话题了
接下来,只需要将飞控与机载电脑连接,然后启动 mavros 节点
roslaunch mavros px4.launch具体的配置可以参考
Ubuntu 安装并配置 mavros (USB 连接)_ubuntu安装mavros_想要个小姑娘的博客-CSDN博客
接下来订阅 /mavros/state 话题,
rostopic echo /mavros/state并查看节点状态,终端输入 rqt_graph

并且 /mavros/state 话题打印结果为
然后将遥控器连接上飞控,在 QGroundControl 中设置遥控器通道
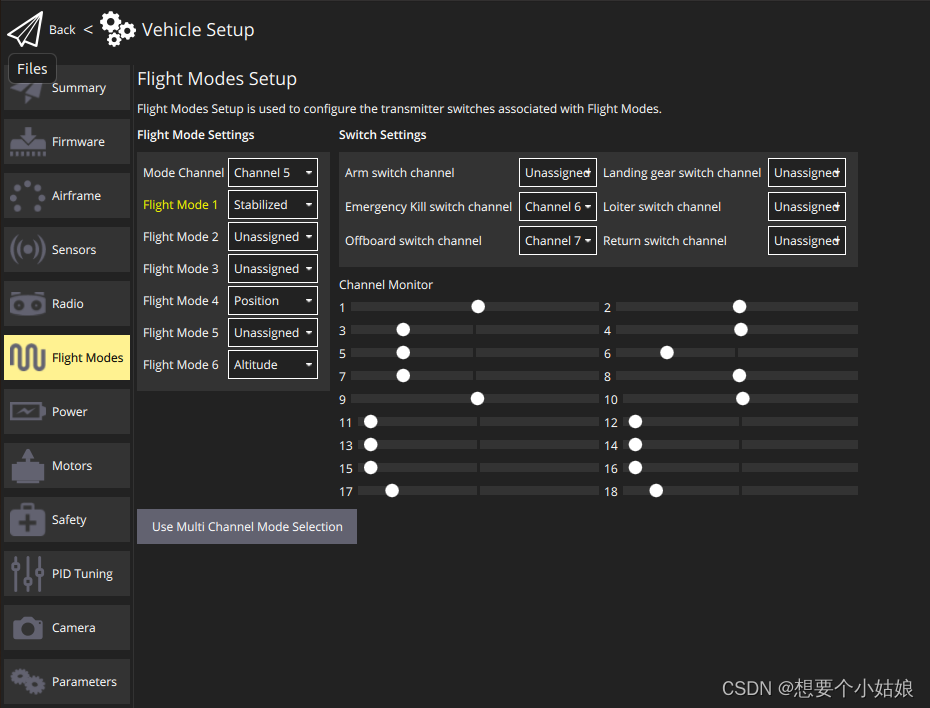
将通道五设置为 模式切换通道,并且设置飞行模式 1 为 自稳模式,飞行模式 4 为位置模式,飞行模式 6 设置为高度模式,设置完成后退出 QGroundControl(启动QGroundControl 会中断 mavros 节点的运行),然后重新启用 mavros 节点
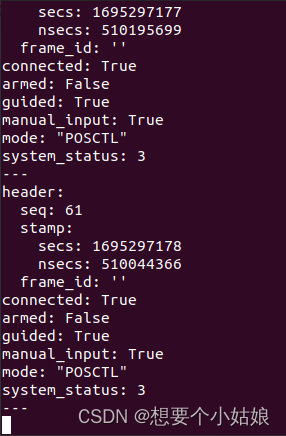
roslaunch mavros px4.launch并打印输出 /mavros/state 话题信息
rostopic echo /mavros/state此时将 通道五 拨动到中位,我们发现 模式切换为了 POSCTL,也就是 Position 模式
继续将 通道五 波动到上位,我们发现模式切换为了 ALTCTL,也就是 Altitude 模式
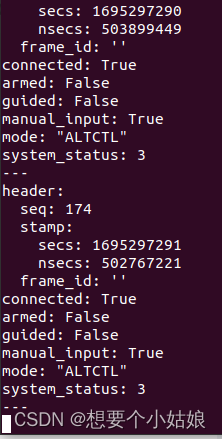
至此就通过 VINS-Fusion 的里程计数据实现了 PX4 的视觉定点和定高功能。