AI视野·今日CS.Robotics 机器人学论文速览
Mon, 25 Sep 2023
Totally 36 papers
👉上期速览✈更多精彩请移步主页
Interesting:
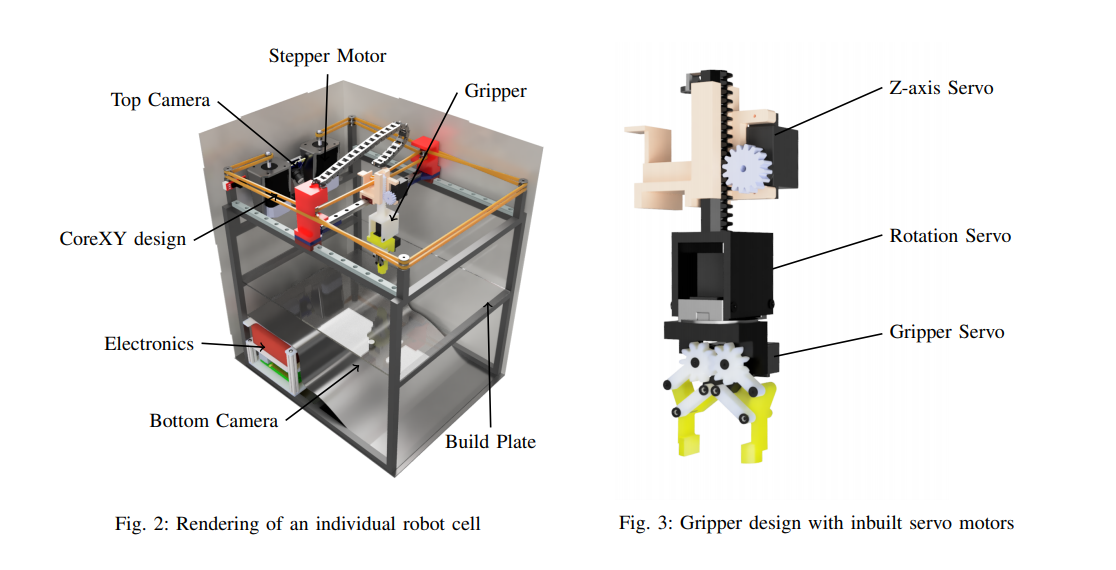
📚CloudGripper, 一套云化的机器抓取人数据采集系统,包含了32个机械臂的集群。(from KTH Royal Institute of Technology)
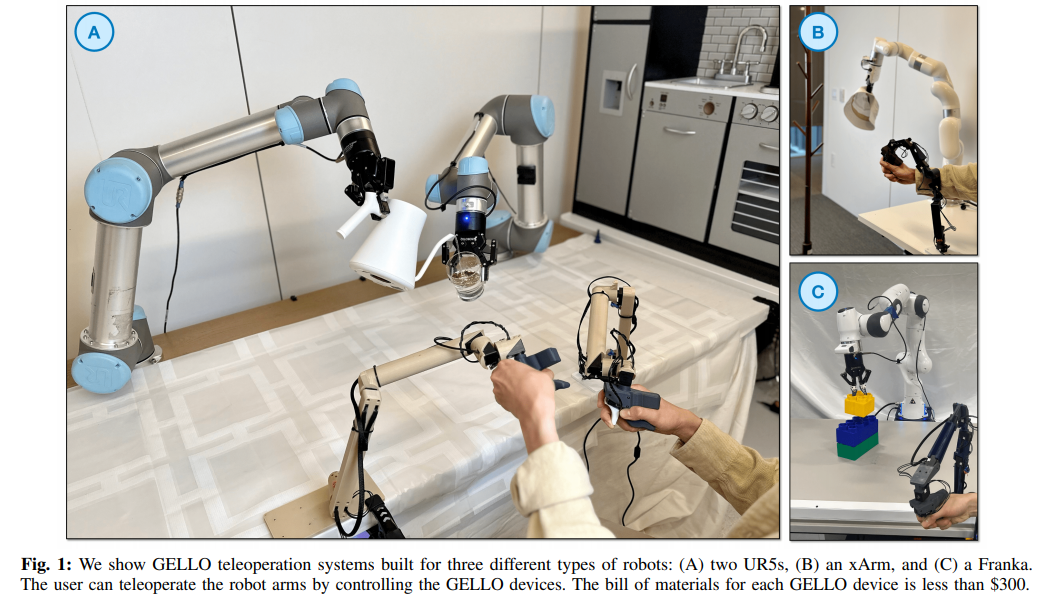
📚GELLO, 一套开源的机械臂遥操作平台,适配多个机械臂。(from 伯克利)
Daily Robotics Papers
| E(2)-Equivariant Graph Planning for Navigation Authors Linfeng Zhao, Hongyu Li, Taskin Padir, Huaizu Jiang, Lawson L.S. Wong 机器人导航的学习是一项关键且具有挑战性的任务。现实世界数据集的稀缺性和昂贵性需要有效的学习方法。在这封信中,我们在规划 2D 导航时利用欧几里德对称性,该对称性源于参考系之间的欧几里德变换并支持参数共享。为了解决非结构化环境的挑战,我们将导航问题制定为几何图上的规划,并开发等变消息传递网络来执行值迭代。此外,为了处理多相机输入,我们提出了一个可学习的等变层来将特征提升到所需的空间。我们对五种不同的任务进行全面评估,包括结构化和非结构化环境,以及已知和未知的地图、给定点目标或语义目标。 |
| Robotic Offline RL from Internet Videos via Value-Function Pre-Training Authors Chethan Bhateja, Derek Guo, Dibya Ghosh, Anikait Singh, Manan Tomar, Quan Vuong, Yevgen Chebotar, Sergey Levine, Aviral Kumar 事实证明,互联网数据的预训练是许多现代机器学习系统广泛泛化的关键因素。如何才能在机器人强化学习 RL 中实现此类功能? 离线 RL 方法从机器人经验数据集中学习,提供了一种将先前数据利用到机器人学习流程中的方法。然而,这些方法与视频数据(例如 Ego4D(可用于机器人技术的最大先验数据集))存在类型不匹配,因为视频仅提供观察体验,而没有 RL 方法所需的动作或奖励注释。在本文中,我们开发了一个系统,用于在机器人离线强化学习中利用大规模人类视频数据集,完全基于通过时间差异学习来学习价值函数。我们表明,与其他从视频数据学习的方法相比,视频数据集上的价值学习所学习的表示更有利于下游机器人离线强化学习。我们的系统称为 V PTR,它将视频数据预训练的优点与对不同机器人数据进行训练的机器人离线 RL 方法相结合,从而产生性能更好、稳健且广泛泛化的操作任务的价值函数和策略。在真实 WidowX 机器人上的几个操作任务中,我们的框架生成的策略比以前的方法大大改进。 |
| GELLO: A General, Low-Cost, and Intuitive Teleoperation Framework for Robot Manipulators Authors Philipp Wu, Yide Shentu, Zhongke Yi, Xingyu Lin, Pieter Abbeel 从人类演示中进行模仿学习是教授机器人新技能的强大框架。然而,学习策略的性能受到示范数据的质量、规模和多样性的瓶颈。在本文中,我们的目标是通过提出 GELLO 来降低收集大量高质量人类演示数据的障碍,GELLO 是一种用于构建低成本且直观的机器人操纵遥操作系统的通用框架。给定一个目标机器人手臂,我们利用 3D 打印零件和现成的电机构建了一个与目标手臂具有相同运动结构的 GELLO 控制器。 GELLO 易于构建且使用直观。通过广泛的用户研究,我们表明,与模仿学习文献中常用的远程操作设备(例如 VR 控制器和 3D 太空鼠标)相比,GELLO 能够实现更可靠、更高效的演示收集。我们进一步展示了 GELLO 执行复杂的双手动和接触丰富的操作任务的能力。为了让每个人都能使用 GELLO,我们为 3 种常用机械臂 Franka、UR5 和 xArm 设计并构建了 GELLO 系统。 |
| PyPose v0.6: The Imperative Programming Interface for Robotics Authors Zitong Zhan, Xiangfu Li, Qihang Li, Haonan He, Abhinav Pandey, Haitao Xiao, Yangmengfei Xu, Xiangyu Chen, Kuan Xu, Kun Cao, Zhipeng Zhao, Zihan Wang, Huan Xu, Zihang Fang, Yutian Chen, Wentao Wang, Xu Fang, Yi Du, Tianhao Wu, Xiao Lin, Yuheng Qiu, Fan Yang, Jingnan Shi, Shaoshu Su, Yiren Lu, Taimeng Fu, Karthik Dantu, Jiajun Wu, Lihua Xie, Marco Hutter, Luca Carlone, Sebastian Scherer, Daning Huang, Yaoyu Hu, Junyi Geng, Chen Wang PyPose 是一个用于机器人学习的开源库。它将基于学习的方法与基于物理的优化相结合,从而实现无缝的端到端机器人学习。由于其精心设计的应用程序编程接口API和高效的实现,它已被用于许多任务。自 2022 年初首次推出以来,PyPose 经历了重大增强,将各种新功能纳入其平台。为了满足日益增长的理解和使用库的需求,并减少新用户的学习曲线,我们介绍了命令式编程接口的基本设计原理,并通过一个极其简单的 Dubins 汽车示例展示了各种功能和模块的灵活使用。 |
| Evolving Spiking Neural Networks to Mimic PID Control for Autonomous Blimps Authors Tim Burgers, Stein Stroobants, Guido de Croon 近年来,人工神经网络 ANN 已成为机器人控制的标准。然而,大规模人工神经网络的一个显着缺点是功耗增加。考虑到功率和重量的严格限制,这成为设计自主飞行器时的一个关键问题。特别是对于以其超长耐用性而闻名的小型飞艇来说,高效的控制方法至关重要。尖峰神经网络 SNN 可以提供一种解决方案,促进节能和异步事件驱动的处理。在本文中,我们发展了 SNN,仅依靠机载传感和处理能力来精确控制非中性浮力室内飞艇的高度。与之前的研究相比,飞艇的高度跟踪性能显着提高,显示出减少的振荡和最小的稳态误差。 SNN 的参数通过进化算法进行优化,使用比例微分积分 PID 控制器作为目标信号。我们在研究各种隐藏层结构的同时开发了两个互补的 SNN 控制器。第一个控制器对控制误差做出快速响应,减轻超调和振荡,而第二个控制器则最大限度地减少由于非中性浮力引起的漂移而导致的稳态误差。 |
| Risk-aware Control for Robots with Non-Gaussian Belief Spaces Authors Matti Vahs, Jana Tumova 本文解决了自主机器人的安全关键控制问题,考虑到未建模的动力学和噪声传感器引起的普遍存在的不确定性。为了考虑到这些不确定性,通常使用概率状态估计器来获得对可能状态的信念。也就是说,粒子滤波器 PF 可以处理机器人状态下的任意非高斯分布。在这项工作中,我们定义了连续离散 PF 的信念状态和信念动态,并在底层信念空间中构造安全集。我们设计了一个控制器,可以证明将机器人的置信状态保持在这个安全集合内。因此,我们确保未知机器人的状态违反安全规范(例如避开危险区域)的风险是有限的。 |
| Robotic Handling of Compliant Food Objects by Robust Learning from Demonstration Authors Ekrem Misimi, Alexander Olofsson, Aleksander Eilertsen, Elling Ruud ye, John Reidar Mathiassen 机器人处理柔顺且可变形的食品原材料具有高生物变异性、复杂的3D几何形状以及机械结构和纹理,目前在海洋空间、农业和食品工业中有着巨大的需求。这些行业中的许多任务都是由操作员手动执行的,由于任务的艰巨性和乏味性,操作员在执行过程中表现出高度的可变性,结果也各不相同。由于当前的机器人学习政策,为最复杂的处理任务引入机器人自动化一直具有挑战性。需要有一个涉及熟练操作员的更一致的学习政策。在本文中,我们解决了出现不一致演示时的机器人学习问题。为此,我们提出了一种基于从演示 LfD 中学习的稳健学习策略,用于机器人抓取符合食品标准的物体。该方法使用 RGB D 图像和触觉数据的合并来估计夹具的必要姿势、夹具手指配置和施加在物体上的力,从而实现有效的机器人处理。在 LfD 训练期间,会保存夹具姿势、手指配置和手指的触觉值以及 RGB D 图像。我们提出了一种 LfD 学习策略,可以自动删除不一致的演示,并估计教师的预期策略。我们的方法的性能已针对具有复杂 3D 形状的易碎且合规的食品对象进行了验证和演示。 |
| OmniDrones: An Efficient and Flexible Platform for Reinforcement Learning in Drone Control Authors Botian Xu, Feng Gao, Chao Yu, Ruize Zhang, Yi Wu, Yu Wang 在这项工作中,我们介绍了 OmniDrones,这是一个高效、灵活的平台,专为无人机控制中的强化学习而定制,基于 Nvidia 的 Omniverse Isaac Sim 构建。它采用自下而上的设计方法,允许用户在 GPU 并行模拟之上轻松设计和试验各种应用场景。它还提供了一系列基准任务,提出了从单架无人机悬停到过度驱动系统跟踪的挑战。总之,我们提出了一个开源无人机模拟平台,配备了一套广泛的无人机学习工具。它包括 4 种无人机模型、5 种传感器模式、4 种控制模式、10 多个基准任务以及一系列广泛使用的 RL 基准。为了展示 OmniDrones 的功能并支持未来的研究,我们还提供了这些基准任务的初步结果。 |
| Teacher-Student Reinforcement Learning for Mapless Navigation using a Planetary Space Rover Authors Anton Bj rndahl Mortensen, Emil Tribler Pedersen, Laia Vives Benedicto, Lionel Burg, Mads Rossen Madsen, Simon B gh 我们使用强化学习 RL 来应对增强行星太空漫游器导航自主性的挑战。未来太空任务的雄心需要漫游车具备先进的自主导航能力才能实现任务目标。强化学习在机器人自主方面的潜力是显而易见的,但它对模拟的依赖带来了挑战。将政策转移到现实世界场景常常会遇到现实差距,从而扰乱从虚拟环境到物理环境的过渡。在火星和月球等地形上进行无地图导航的背景下,现实差距进一步加剧,其中不可预测的地形和环境因素发挥着重要作用。有效的导航需要一种适应这些复杂性和现实世界数据噪声的方法。我们引入了一种使用离线噪声数据的新颖的两阶段强化学习方法。我们的方法采用了师生政策学习范式,其灵感来自于作弊学习方法。教师政策是通过模拟进行训练的。随后,学生策略接受噪声数据的训练,旨在模仿教师的行为,同时对现实世界的不确定性更加稳健。我们的政策被转移到定制设计的流动站进行现实世界的测试。 |
| CloudGripper: An Open Source Cloud Robotics Testbed for Robotic Manipulation Research, Benchmarking and Data Collection at Scale Authors Muhammad Zahid, Florian T. Pokorny 我们推出了 CloudGripper,这是一个开源云机器人测试平台,由可扩展、节省空间且具有成本效益的设计组成,构建为由 32 个小型机器人手臂工作单元组成的机架。每个机器人工作单元都是完全封闭的,并具有单独的照明、低成本定制的 5 自由度笛卡尔机器人手臂,带有附加的平行钳口夹具和用于实验的双摄像头设置。该系统设计注重连续运行,并具有 10 Gbit 网络连接,可实现高吞吐量远程控制实验和机器人操作数据收集。此外,CloudGripper 还旨在形成一个社区测试平台,以研究机器人操作背景下大规模机器学习以及云和边缘计算的挑战。在这项工作中,我们描述了系统的机械设计、其初始软件堆栈,并评估了所提出的机器人手臂设计所执行的运动的可重复性。还提供本地网络 API 吞吐量和延迟分析。 CloudGripper Rope 100 收集了超过 100 小时的随机推绳交互和约 400 万张相机图像的数据集,可作为展示数据收集功能的概念证明。 |
| Learning to Walk and Fly with Adversarial Motion Priors Authors Giuseppe L Erario, Drew Hanover, Angel Romero, Yunlong Song, Gabriele Nava, Paolo Maria Viceconte, Daniele Pucci, Davide Scaramuzza 机器人多模式运动包含在步行和飞行之间转换的能力,这是机器人技术的一项重大挑战。这项工作提出了一种能够在腿部运动和空中运动之间自动平滑过渡的方法。利用对抗性运动先验的概念,我们的方法允许机器人模仿运动数据集并完成所需的任务,而不需要复杂的奖励函数。该机器人学习人类步态的行走模式,并通过轨迹优化获得的运动学习空中运动模式。通过这个过程,机器人使用强化学习来适应基于环境反馈的运动方案,并自发地出现模式切换行为。研究结果凸显了通过自动控制步行和飞行模式在空中人形机器人中实现多模式运动的潜力,为搜索和救援、监视和探索任务等不同领域的应用铺平了道路。 |
| Open Source Robot Localization for Non-Planar Environments Authors Francisco Mart n Rico, Jos Miguel Guerrero Hern ndez, Rodrigo P rez Rodr guez, Juan Diego Pe a Narv ez, Alberto Garc a G mez Jacinto 移动机器人执行任务的操作环境通常表现出非平坦的地形特征,包括具有坡道和斜坡的室外和室内环境。在这种情况下,用于定位的传统方法遇到新的挑战和限制。这项研究描绘了一个结合了地面高程和倾斜度考虑因素的定位框架,偏离了在这种情况下可能会动摇的传统二维定位范式。在我们提出的方法中,地图包含海拔和空间占用信息,采用网格地图和八角图。同时,除了通常的结构和动态障碍物之外,感知模型还设计用于适应机器人的倾斜方向和地面作为障碍物的潜在存在。我们在 Nav2 以及以机器人导航而闻名的受人尊敬的开源框架中开发并严格验证了我们的方法。 |
| Enhancing Graph Representation of the Environment through Local and Cloud Computation Authors Francesco Argenziano, Vincenzo Suriani, Daniele Nardi 丰富操作环境的机器人表示是一项具有挑战性的任务,旨在弥合低级传感器读数和高级语义理解之间的差距。拥有丰富的表示通常需要计算要求较高的架构和基于纯点云的检测系统,这些系统在处理必须由机器人处理的日常物体时会很困难。为了克服这些问题,我们提出了一种基于图的表示,通过提供来自多个来源的机器人环境的语义表示来解决这一差距。事实上,为了从环境中获取信息,该框架将经典计算机视觉工具与现代计算机视觉云服务相结合,确保了机载硬件上的计算可行性。通过将本体层次结构与 800 多个对象类相结合,该框架实现了跨域适应性,从而消除了对特定环境工具的需求。所提出的方法允许我们处理小对象并将它们集成到环境的语义表示中。该方法在机器人操作系统 ROS 中实现,使用 RViz 可视化工具进行环境表示。 |
| eWand: A calibration framework for wide baseline frame-based and event-based camera systems Authors Thomas Gossard, Andreas Ziegler, Levin Kolmar, Jonas Tebbe, Andreas Zell 准确的校准对于使用多个相机精确地三角测量物体的位置至关重要。然而,这也是一个耗时的过程,需要对摄像机的每次位移进行重复。标准方法是使用具有已知几何形状的印刷图案来估计相机的内在和外在参数。同样的想法可以应用于基于事件的相机,尽管它需要额外的工作。通过使用事件的帧重建,可以检测打印图案。闪烁图案也可以显示在屏幕上。然后,可以直接从事件中检测到模式。这种校准方法可以为基于帧和基于事件的相机提供准确的内在校准。然而,使用 2D 图案对于多相机外在校准有一些限制,因为相机具有高度不同的视角和宽基线。 2D 图案只能从一个方向检测,并且需要很大的尺寸以补偿其到相机的距离。这使得外部校准既耗时又麻烦。为了克服这些限制,我们提出了 eWand,这是一种在不透明球体内使用闪烁 LED 代替印刷或显示图案的新方法。 |
| UWA360CAM: A 360$^{\circ}$ 24/7 Real-Time Streaming Camera System for Underwater Applications Authors Quan Dung Pham, Yipeng Zhu, Tan Sang Ha, K.H. Long Nguyen, Binh Son Hua, Sai Kit Yeung 全向相机是一种成本效益高、信息丰富的传感器,非常适合许多海洋应用和海洋科学界,涵盖增强现实、测绘、运动估计、视觉监视以及同步定位和测绘等多个领域。然而,由于传感器分辨率、宽视场、电源、光学设计、系统校准和成像等多个方面的技术复杂性,设计和构建用于水下应用的如此高质量的360度环流实时流媒体摄像系统是一个具有挑战性的问题。过热管理。本文提出了一种新颖且全面的系统,解决了专为水下环境量身定制的全功能 360 度全景实时流媒体摄像系统的设计、构建和实施相关的复杂性。我们提出的系统 UWA360CAM 可以实时传输视频,7 天 24 小时运行,并捕获 360 度水下全景图像。值得注意的是,我们的工作是为该系统提供详细且可复制的说明的开创性努力。 |
| Disturbance Rejection Control for Autonomous Trolley Collection Robots with Prescribed Performance Authors Rui Dong Xi, Liang Lu, Xue Zhang, Xiao Xiao, Bingyi Xia, Jiankun Wang, Max Q. H. Meng 由于环境复杂、噪声和外部干扰严重,自动小车收集机器人ATCR的轨迹跟踪控制是一项艰巨的工作。这项工作研究了遭受严重环境干扰的 ATCR 控制方案。首先提出了一种基于运动学模型的快速收敛的自适应滑模扰动观测器来估计集总扰动。在此基础上,利用反步技术提出了具有规定性能的鲁棒控制器,提高了瞬态性能并保证了快速收敛。 |
| Learning Actions and Control of Focus of Attention with a Log-Polar-like Sensor Authors Robin G ransson, Volker Krueger 考虑到减少自主移动机器人图像处理时间的长期目标,我们在本文中探讨了使用对数极坐标图像数据和注视控制。注视控制不是在笛卡尔图像上完成的,而是在对数极坐标图像数据上完成的。为此,我们从 Atari 游戏的经典深度强化学习方法开始。我们使用 LSTM 网络扩展 A3C 深度 RL 方法,并学习玩三个 Atari 游戏的策略和注视控制的策略。 |
| On the Robotic Uncertainty of Fully Autonomous Traffic Authors Hangyu Li, Xiaotong Sun 最近的交通研究表明,自动驾驶汽车有潜力提高交通流量效率,因为它们能够保持较小的跟车距离。然而,作为一类独特的地面机器人,自动驾驶汽车很容易受到机器人错误的影响,特别是在其感知模块中,从而导致其运动的不确定性和碰撞风险的增加。因此,在现实世界的运营中,实施了保守的运营策略,例如更大的车距和更慢的速度,以将安全性置于交通容量之上。为了解决这种不一致问题,本文提出了一种分析模型框架,该框架描述了自动驾驶汽车中机器人不确定性所产生的交通安全与效率之间的内生互惠性。对跟车场景进行了广泛的研究,以不确定的车头时距作为桥接单车道容量和碰撞概率的关键参数。然后引入马尔可夫链来描述车道容量的动态,并采用由此产生的预期碰撞包容容量作为完全自主交通的最终性能衡量标准。 |
| A Multi-Robot Task Assignment Framework for Search and Rescue with Heterogeneous Teams Authors Hamid Osooli, Paul Robinette, Kshitij Jerath, S. Reza Ahmadzadeh 在灾后场景中,高效的搜索和救援行动需要机器人和人类之间的协作。现有的规划方法侧重于特定方面,但忽视了信息收集、任务分配和规划等关键要素。此外,以前考虑机器人能力和受害者需求的方法由于重复的规划步骤而受到时间复杂性的影响。为了克服这些挑战,我们引入了一个综合框架“多阶段多机器人任务分配”。该框架集成了侦察、任务分配和路径规划阶段,根据机器人能力、受害者需求和过去的机器人表现优化任务分配。我们的迭代方法确保在问题限制内实现目标。与最先进的基线相比,对四张地图的评估证明了我们算法的优越性,性能显着提高了 97%。 |
| A Study on Learning Social Robot Navigation with Multimodal Perception Authors Bhabaranjan Panigrahi, Amir Hossain Raj, Mohammad Nazeri, Xuesu Xiao 自主移动机器人需要通过其机载传感器(例如激光雷达和 RGB 摄像头)感知环境,然后做出适当的导航决策。为了在人类居住的公共空间中导航,这样的导航任务不仅仅是避障,还需要考虑周围的人类及其意图,以某种程度改变导航行为以响应潜在的社会规范,即遵守社会规范。机器学习方法被证明可以有效地以数据驱动的方式捕获那些复杂而微妙的社交互动,而无需明确手工制作简化的模型或成本函数。考虑到多种可用的传感器模式和学习方法的效率,本文提出了使用大规模现实世界数据集学习具有多模态感知的社交机器人导航的综合研究。该研究调查了全局和局部规划层面上的社交机器人导航决策,并将单模态和多模态学习与不同社交场景中的一组经典导航方法进行了对比,同时还从学习的角度分析了训练和泛化性能。我们还进行了一项人类研究,探讨多模式感知学习如何影响感知的社会依从性。结果表明,在数据集和人类研究中,多模态学习比单模态学习具有明显的优势。 |
| Recent Advances in Path Integral Control for Trajectory Optimization: An Overview in Theoretical and Algorithmic Perspectives Authors Muhammad Kazim, JunGee Hong, Min Gyeom Kim, Kwang Ki K. Kim 本文概述了用于随机最优控制和轨迹优化的路径积分 PI 控制方法。我们简要总结了路径积分控制的理论发展,以计算随机最优控制的解决方案,并提供了交叉熵 CE 方法的算法描述、使用后退视野方案(称为模型预测路径积分 MPPI )的开环控制器以及参数化模型基于路径积分控制理论的状态反馈控制器。我们讨论基于路径积分控制的策略搜索方法、高效稳定的采样策略、多智能体决策的扩展以及用于流形轨迹优化的 MPPI。对于教程演示,在 MATLAB 和 ROS2 Gazebo 模拟中实现了一些基于 PI 的控制器,以实现轨迹优化。 |
| Cognitive Approach to Hierarchical Task Selection for Human-Robot Interaction in Dynamic Environments Authors Syed T. Bukhari, Bashira Akter Anima, David Feil Seifer, Wajahat M. Qazi 在高效灵活的人机协作工作环境中,机器人团队成员必须能够识别人类用户的明确请求和隐含操作。确定在这种情况下该做什么需要代理能够在对象、其行为以及行为对环境的影响之间构建关联。在这方面,语义记忆被引入来理解明确的线索及其与可用物体的关系以及泡茶和三明治所需的技能。我们扩展了之前的分层机器人控制架构,添加了根据用户反馈和环境背景执行最合适任务的功能。为了验证该系统,在分层任务树中实施了两种类型的技能:1 泡茶技能和 2 三明治制作技能。在机器人与人类的对话过程中,机器人能够利用本体确定隐藏的上下文,并开始采取相应的行动。例如,如果人说我渴了或者外面很冷,机器人就会开始执行泡茶技能。相反,如果这个人说,我饿了或者我需要吃点东西,机器人就会做三明治。本实验使用了人形机器人 Baxter。我们针对每种技能测试了三种场景,其中物体位于桌子上的不同位置。 |
| Machine Learning Meets Advanced Robotic Manipulation Authors Saeid Nahavandi, Roohallah Alizadehsani, Darius Nahavandi, Chee Peng Lim, Kevin Kelly, Fernando Bello 自动化工业带来高质量的生产、更低的制造成本和更好地利用人力资源。机器人机械臂在自动化过程中发挥着重要作用。然而,对于复杂的操作任务,硬编码高效且安全的轨迹具有挑战性且耗时。机器学习方法有潜力根据专家演示来学习此类控制器。尽管取得了令人鼓舞的进展,但必须开发更好的方法来提高机器学习方法在训练和部署阶段的安全性、可靠性和效率。这项调查旨在回顾应用于现实世界操作任务的机器学习方法的前沿技术和最新趋势。在回顾了机器学习的相关背景后,本文的其余部分将重点介绍机器学习在工业、医疗保健、农业、太空、军事和搜救等不同领域的应用。 |
| Real-time Motion Generation and Data Augmentation for Grasping Moving Objects with Dynamic Speed and Position Changes Authors Kenjiro Yamamoto, Hiroshi Ito, Hideyuki Ichiwara, Hiroki Mori, Tetsuya Ogata 虽然深度学习使真实的机器人能够执行过去难以实现的复杂任务,但挑战在于真实环境中大量的试错和运动教学。由于其动态特性,对移动物体的操纵需要学习多种因素,例如物体的位置、移动速度和抓取时机。我们提出了一种数据增强方法,使机器人能够以较低的成本抓取不同速度的移动物体和抓取时机。具体来说,机器人被教导使用远程操作来抓取低速移动的物体,并且通过在时间序列方向上对机器人传感器数据进行下采样和填充来生成具有不同速度和抓取时机的多个数据。通过学习时间序列中的多个传感器数据,机器人可以生成运动,同时针对未学习的运动速度和突然的速度变化调整抓取时机。 |
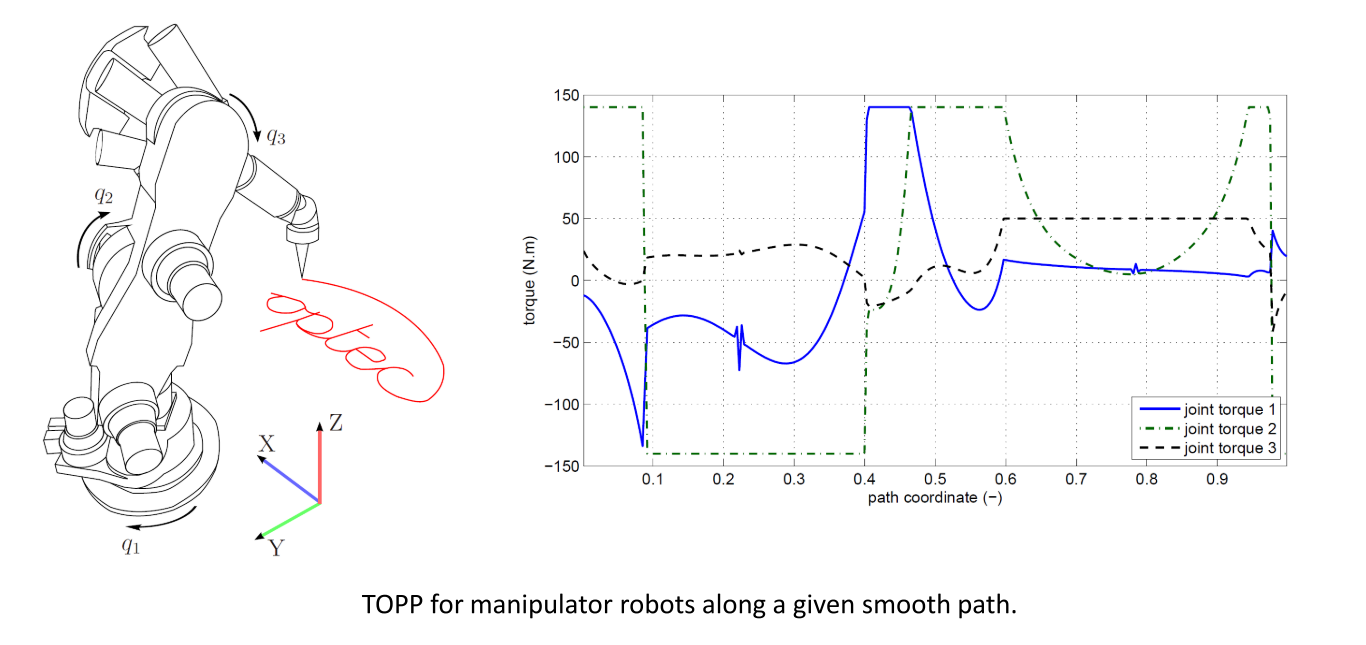
| Real-time Batched Distance Computation for Time-Optimal Safe Path Tracking Authors Shohei Fujii, Quang Cuong Pham 在人机协作中,协作机器人的速度和人类工人的安全之间一直存在权衡关系。在我们之前的论文中,我们介绍了一种时间最优路径跟踪算法,旨在最大限度地提高速度,同时确保人类工人的安全。该算法实时运行,并根据 ISO 标准为每个周期提供安全、最快的控制输入。然而,由于保守的模型简化导致距离计算不准确,尚未实现真正的最优。为了实现真正的最优性,我们需要一种能够计算距离的方法 1. 在许多机器人配置下沿着轨迹进行检查 2. 实时进行在线机器人控制 3. 尽可能精确地实现最优控制。在本文中,我们提出了一种基于预计算链路局部 SDF 的批量、快速且精确的距离检查方法。我们的方法可以在运行时使用 GPU 在不到 1 毫秒的时间内检查沿轨迹的 500 个路点的距离,使其适合时间关键的机器人控制。 |
| RCMS: Risk-Aware Crash Mitigation System for Autonomous Vehicles Authors Faizan M. Tariq, David Isele, John S. Baras, Sangjae Bae 我们提出了一种风险意识碰撞缓解系统 RCMS ,以增强任何现有的运动规划器 MP ,使自动驾驶车辆能够在高风险情况下执行规避操作,并在碰撞不可避免时最大限度地减少碰撞的严重程度。为了促进 RCMS 和 MP 之间的平稳过渡,我们开发了一种新颖的激活机制,该机制在统一的滞后带方法中结合了瞬时和预测碰撞风险评估策略。对于轨迹规划,我们部署了基于模块化后退地平线优化的方法,该方法可以最大限度地减少平滑的情境风险状况,同时遵守物理道路限制以及车辆执行器限制。 |
| Human Following in Mobile Platforms with Person Re-Identification Authors Mario Srouji, Yao Hung Hubert Tsai, Hugues Thomas, Jian Zhang 人类跟随是人类机器人交互的一个重要特征,但它给现实世界场景中的移动代理带来了许多挑战。一些主要障碍是目标人可能在人群中、受到其他人的阻碍或背对代理人。为了应对这些挑战,我们提出了一种新颖的人员重新识别模块,由三部分组成:360 度视觉注册、使用人脸和躯干的基于神经的人员重新识别以及记录和预测目标人员未来位置的运动跟踪器。我们的人类跟随系统还解决了其他挑战,包括以低延迟识别快速移动的目标、搜索移出摄像机视线的目标、避免碰撞以及根据目标人和移动设备之间的距离自适应地选择不同的跟随机制代理人。 |
| SAVME: Efficient Safety Validation for Autonomous Systems Using Meta-Learning Authors Marc R. Schlichting, Nina V. Board, Anthony L. Corso, Mykel J. Kochenderfer 在部署之前发现自治系统的潜在故障非常重要。基于证伪的方法通常用于评估此类系统的安全性,但运行许多精确模拟的成本可能很高。通过识别被测系统的关键故障场景并减少模拟运行时间,可以加速验证。我们提出了一种贝叶斯方法,将元学习策略与多武装强盗框架相结合。我们的方法涉及学习容易在被测系统中触发故障的场景参数的分布,以及能够实现快速准确模拟的保真度设置的分布。本着元学习的精神,我们还评估学习的保真度设置分布是否有助于更快地学习新场景的场景参数分布。我们使用尖端的 3D 驾驶模拟器展示我们的方法,该模拟器结合了自动驾驶车辆堆栈的 16 种保真度设置,其中包括摄像头和激光雷达传感器。我们根据自动驾驶车辆碰撞前类型评估各种场景。 |
| POLAR3D: Augmenting NASA's POLAR Dataset for Data-Driven Lunar Perception and Rover Simulation Authors Bo Hsun Chen, Peter Negrut, Thomas Liang, Nevindu Batagoda, Harry Zhang, Dan Negrut 我们报告了 POLAR3D 的一项工作,这是一组数字资产,可增强 NASA 生成的立体图像 POLAR 数据集,以模拟月球照明条件。我们的贡献是双重的。首先,我们对 POLAR 数据集中的每张照片进行了注释,为岩石及其阴影提供了大约 23000 个标签。其次,我们对 POLAR 数据集中可用的几个月球地形场景进行了数字化。具体来说,通过利用月球照片和 POLAR 的 LiDAR 点云,我们为所有可识别资产构建了详细的 obj 文件。 POLAR3D 是一组数字资产,由与月球地形场景的数字孪生相关的岩石阴影标签和 obj 文件组成。这个新数据集可用于训练月球探索的感知算法,并合成原始 POLAR 集合之外的真实感图像。同样,目标资产可以集成到模拟环境中,以促进 POLAR 场景的数字孪生中的真实流动站操作。 |
| Stochastic scheduling of autonomous mobile robots at hospitals Authors Lulu Cheng, Ning Zhao 新型冠状病毒的爆发,大大增加了医护人员的脆弱性。本文通过提出随机环境下自主移动机器人 AMR 的调度问题的解决方案来解决医务人员的安全和压力缓解问题。考虑到AMR出行和服务时间受周围环境影响的随机性,对AMR的路线进行规划,以最小化医院的日常成本,包括AMR固定成本、违反时间窗的处罚成本和交通成本。为了有效地生成高质量的解决方案,我们确定了几个属性并将它们合并到改进的 Tabu Search I TS 算法中以解决问题。实验评估表明,I TS 算法通过生成更高质量的解决方案而优于现有方法。我们利用医疗请求环境的特点,智能分配适当数量的AMR,高效提供服务,从而大幅降低医院成本,提高医疗资源利用率。 |
| Using a Catenary Trajectory to Reduce Wellbore Friction in Horizontal Extended Reach Drilling Authors Vu Nguyen 由于与总成本的关系,井眼摩擦是钻井时最大的问题之一。引入悬链线概念是为了减少井眼摩擦,但需要详细分析。该项目将填补这一空白。悬链线形状就是绳索、链条或钻柱的自然形状。然后钻柱将自由悬挂在井眼内。完美的是,孔和弦之间不应该有接触,因此不存在摩擦。应以这种方式最小化扭矩和阻力。通过案例研究来检验悬链线轨迹设计和传统二维弧设计之间的结果。 |
| H2O+: An Improved Framework for Hybrid Offline-and-Online RL with Dynamics Gaps Authors Haoyi Niu, Tianying Ji, Bingqi Liu, Haocheng Zhao, Xiangyu Zhu, Jianying Zheng, Pengfei Huang, Guyue Zhou, Jianming Hu, Xianyuan Zhan 在没有高保真模拟环境或大量离线数据的情况下,使用强化学习 RL 解决现实世界的复杂任务可能非常具有挑战性。在不完美的模拟环境中训练的在线强化学习代理可能会遇到严重的模拟问题。离线强化学习方法虽然不需要模拟器,但通常对离线数据集的大小和质量提出苛刻的要求。最近出现的混合离线和在线强化学习提供了一个有吸引力的框架,可以联合使用有限的离线数据和不完善的模拟器来进行可转移的政策学习。在本文中,我们开发了一种名为 H2O 的新算法,它提供了极大的灵活性来桥接离线和在线学习方法的各种选择,同时还考虑了真实环境和模拟环境之间的动态差距。 |
| Characterizing Smooth Safety Filters via the Implicit Function Theorem Authors Max H. Cohen, Pio Ong, Gilbert Bahati, Aaron D. Ames 基于优化的安全滤波器,例如基于控制屏障函数 CBF 的二次程序 QP,已在控制自主系统以实现复杂目标方面取得了成功。这些 CBF QP 可以被证明是连续的,但通常不是平滑的,更不用说连续可微了。在本文中,我们提出了平滑安全滤波器和平滑控制器的一般特征,这些平滑控制器基于隐函数定理以微创方式保证安全。 |
| ViT-MDHGR: Cross-day Reliability and Agility in Dynamic Hand Gesture Prediction via HD-sEMG Signal Decoding Authors Qin Hu, Golara Ahmadi Azar, Alyson Fletcher, Sundeep Rangan, S. Farokh Atashzar 表面肌电 sEMG 和高密度 sEMG HD sEMG 生物信号已被广泛研究用于假肢装置、神经机器人和最近的人机界面的肌电控制,因为它们能够以可穿戴和非侵入的方式进行手势识别预测。据报道,当日盘中表现较高。然而,由于传统方法随着时间的推移通用性较差,训练日和测试日之间的日间表现大幅下降,阻碍了此类技术在现实生活实践中的应用。最近关于多天手势识别的可行性的研究有限。现有的研究面临着一个重大挑战,即由于肌电控制的诱导延迟,需要较长的表面肌电图周期,使得相应的神经接口变得不切实际。本文提出了一种基于 ViT 的紧凑网络,用于多天动态手势预测。我们解决了主要挑战,因为所提出的模型仅依赖于非常短的 HD sEMG 信号窗口,即 50 ms,仅占实时肌电实施惯例的六分之一,从而提高了敏捷性和响应能力。我们提出的模型可以预测 20 名受试者的 11 种动态手势,在测试当天以及训练后 3-25 天的平均准确度超过 71。 |
| A Diffusion-Model of Joint Interactive Navigation Authors Matthew Niedoba, Jonathan Wilder Lavington, Yunpeng Liu, Vasileios Lioutas, Justice Sefas, Xiaoxuan Liang, Dylan Green, Setareh Dabiri, Berend Zwartsenberg, Adam Scibior, Frank Wood 自动驾驶车辆系统的模拟要求模拟交通参与者表现出多样化且真实的行为。在模拟中使用预先记录的现实世界交通场景可以确保真实性,但安全关键事件的稀有性使得大规模收集驾驶场景的成本很高。在本文中,我们提出了 DJINN 一种基于扩散的交通场景生成方法。我们的方法共同分散了所有智能体的轨迹,以过去、现在或未来的一组灵活的状态观察为条件。在流行的轨迹预测数据集上,我们报告了联合轨迹指标的最先进性能。 |
| Task allocation planning based on HTN for national economic mobilization Authors Peng Zhao 为了应对国民经济动员中的任务分配问题,提出一种基于层次任务网络HTN的国民经济动员任务分配规划方法。设计HTN规划算法来解决和优化任务分配,探索解决资源短缺问题的方法。 |
| Chinese Abs From Machine Translation |
Papers from arxiv.org
更多精彩请移步主页
pic from pexels.com