接上文我们继续
如果我们要在仿真环境中进行测试,需要将摄像头配置成功。
一、配置位置
sudo vim /opt/ros/foxy/share/turtlebot3_gazebo/models/turtlebot3_waffle/model.sdf二、修改
<joint name="camera_rgb_optical_joint" type="fixed"><parent>camera_rgb_frame</parent><child>camera_rgb_optical_frame</child><pose>0 0 0 -1.57079632679 0 -1.57079632679</pose><axis><xyz>0 0 1</xyz></axis></joint> 重命名 <link name="camera_rgb_frame"> 为 <link name="camera_rgb_optical_frame">
增加 <link name="camera_rgb_frame"/>
修改 <sensor name="camera" type="camera"> 为 <sensor name="camera" type="depth">
修改 image width/height from 1920x1080 to 640x480
修改 min scan range from 0.12 to 0.2可以在vim里面使用
例如:
:/min
进行查找如果不想动手,可以直接粘贴我的:
<?xml version="1.0" ?>
<sdf version="1.5"><model name="turtlebot3_waffle"> <pose>0.0 0.0 0.0 0.0 0.0 0.0</pose><link name="base_footprint"/><link name="base_link"><inertial><pose>-0.064 0 0.048 0 0 0</pose><inertia><ixx>4.2111447e-02</ixx><ixy>0</ixy><ixz>0</ixz><iyy>4.2111447e-02</iyy><iyz>0</iyz><izz>7.5254874e-02</izz></inertia><mass>1.3729096e+00</mass></inertial><collision name="base_collision"><pose>-0.064 0 0.048 0 0 0</pose><geometry><box><size>0.265 0.265 0.089</size></box></geometry></collision><visual name="base_visual"><pose>-0.064 0 0 0 0 0</pose><geometry><mesh><uri>model://turtlebot3_waffle/meshes/waffle_base.dae</uri><scale>0.001 0.001 0.001</scale></mesh></geometry></visual></link><link name="imu_link"><sensor name="tb3_imu" type="imu"><always_on>true</always_on><update_rate>200</update_rate><imu><angular_velocity><x><noise type="gaussian"><mean>0.0</mean><stddev>2e-4</stddev></noise></x><y><noise type="gaussian"><mean>0.0</mean><stddev>2e-4</stddev></noise></y><z><noise type="gaussian"><mean>0.0</mean><stddev>2e-4</stddev></noise></z></angular_velocity><linear_acceleration><x><noise type="gaussian"><mean>0.0</mean><stddev>1.7e-2</stddev></noise></x><y><noise type="gaussian"><mean>0.0</mean><stddev>1.7e-2</stddev></noise></y><z><noise type="gaussian"><mean>0.0</mean><stddev>1.7e-2</stddev></noise></z></linear_acceleration></imu><plugin name="turtlebot3_imu" filename="libgazebo_ros_imu_sensor.so"><ros><!-- <namespace>/tb3</namespace> --><remapping>~/out:=imu</remapping></ros></plugin></sensor></link><link name="base_scan"> <inertial><pose>-0.052 0 0.111 0 0 0</pose><inertia><ixx>0.001</ixx><ixy>0.000</ixy><ixz>0.000</ixz><iyy>0.001</iyy><iyz>0.000</iyz><izz>0.001</izz></inertia><mass>0.114</mass></inertial><collision name="lidar_sensor_collision"><pose>-0.052 0 0.111 0 0 0</pose><geometry><cylinder><radius>0.0508</radius><length>0.055</length></cylinder></geometry></collision><visual name="lidar_sensor_visual"><pose>-0.064 0 0.121 0 0 0</pose><geometry><mesh><uri>model://turtlebot3_waffle/meshes/lds.dae</uri><scale>0.001 0.001 0.001</scale></mesh></geometry></visual><sensor name="hls_lfcd_lds" type="ray"><always_on>true</always_on><visualize>true</visualize><pose>-0.064 0 0.121 0 0 0</pose><update_rate>5</update_rate><ray><scan><horizontal><samples>360</samples><resolution>1.000000</resolution><min_angle>0.000000</min_angle><max_angle>6.280000</max_angle></horizontal></scan><range><min>0.20000</min><max>3.5</max><resolution>0.015000</resolution></range><noise><type>gaussian</type><mean>0.0</mean><stddev>0.01</stddev></noise></ray><plugin name="turtlebot3_laserscan" filename="libgazebo_ros_ray_sensor.so"><ros><!-- <namespace>/tb3</namespace> --><remapping>~/out:=scan</remapping></ros><output_type>sensor_msgs/LaserScan</output_type><frame_name>base_scan</frame_name></plugin></sensor></link><link name="wheel_left_link"><inertial><pose>0.0 0.144 0.023 -1.57 0 0</pose><inertia><ixx>1.1175580e-05</ixx><ixy>-4.2369783e-11</ixy><ixz>-5.9381719e-09</ixz><iyy>1.1192413e-05</iyy><iyz>-1.4400107e-11</iyz><izz>2.0712558e-05</izz></inertia><mass>0.1</mass></inertial><collision name="wheel_left_collision"><pose>0.0 0.144 0.023 -1.57 0 0</pose><geometry><cylinder><radius>0.033</radius><length>0.018</length></cylinder></geometry><surface><!-- This friction pamareter don't contain reliable data!! --><friction><ode><mu>100000.0</mu><mu2>100000.0</mu2><fdir1>0 0 0</fdir1><slip1>0.0</slip1><slip2>0.0</slip2></ode></friction><contact><ode><soft_cfm>0</soft_cfm><soft_erp>0.2</soft_erp><kp>1e+5</kp><kd>1</kd><max_vel>0.01</max_vel><min_depth>0.001</min_depth></ode></contact></surface></collision><visual name="wheel_left_visual"><pose>0.0 0.144 0.023 0 0 0</pose><geometry><mesh><uri>model://turtlebot3_waffle/meshes/tire.dae</uri><scale>0.001 0.001 0.001</scale></mesh></geometry></visual></link><link name="wheel_right_link"><inertial><pose>0.0 -0.144 0.023 -1.57 0 0</pose><inertia><ixx>1.1175580e-05</ixx><ixy>-4.2369783e-11</ixy><ixz>-5.9381719e-09</ixz><iyy>1.1192413e-05</iyy><iyz>-1.4400107e-11</iyz><izz>2.0712558e-05</izz></inertia><mass>0.1</mass></inertial><collision name="wheel_right_collision"><pose>0.0 -0.144 0.023 -1.57 0 0</pose><geometry><cylinder><radius>0.033</radius><length>0.018</length></cylinder></geometry><surface><!-- This friction pamareter don't contain reliable data!! --><friction><ode><mu>100000.0</mu><mu2>100000.0</mu2><fdir1>0 0 0</fdir1><slip1>0.0</slip1><slip2>0.0</slip2></ode></friction><contact><ode><soft_cfm>0</soft_cfm><soft_erp>0.2</soft_erp><kp>1e+5</kp><kd>1</kd><max_vel>0.01</max_vel><min_depth>0.001</min_depth></ode></contact></surface></collision><visual name="wheel_right_visual"><pose>0.0 -0.144 0.023 0 0 0</pose><geometry><mesh><uri>model://turtlebot3_waffle/meshes/tire.dae</uri><scale>0.001 0.001 0.001</scale></mesh></geometry></visual></link><link name='caster_back_right_link'><pose>-0.177 -0.064 -0.004 -1.57 0 0</pose><inertial><mass>0.001</mass><inertia><ixx>0.00001</ixx><ixy>0.000</ixy><ixz>0.000</ixz><iyy>0.00001</iyy><iyz>0.000</iyz><izz>0.00001</izz></inertia></inertial><collision name='collision'><geometry><sphere><radius>0.005000</radius></sphere></geometry><surface><contact><ode><soft_cfm>0</soft_cfm><soft_erp>0.2</soft_erp><kp>1e+5</kp><kd>1</kd><max_vel>0.01</max_vel><min_depth>0.001</min_depth></ode></contact></surface></collision></link><link name='caster_back_left_link'><pose>-0.177 0.064 -0.004 -1.57 0 0</pose><inertial><mass>0.001</mass><inertia><ixx>0.00001</ixx><ixy>0.000</ixy><ixz>0.000</ixz><iyy>0.00001</iyy><iyz>0.000</iyz><izz>0.00001</izz></inertia></inertial><collision name='collision'><geometry><sphere><radius>0.005000</radius></sphere></geometry><surface><contact><ode><soft_cfm>0</soft_cfm><soft_erp>0.2</soft_erp><kp>1e+5</kp><kd>1</kd><max_vel>0.01</max_vel><min_depth>0.001</min_depth></ode></contact></surface></collision></link><link name="camera_link"/><link name="camera_rgb_frame"/><link name="camera_rgb_optical_frame"><inertial><pose>0.069 -0.047 0.107 0 0 0</pose><inertia><ixx>0.001</ixx><ixy>0.000</ixy><ixz>0.000</ixz><iyy>0.001</iyy><iyz>0.000</iyz><izz>0.001</izz></inertia><mass>0.035</mass></inertial><pose>0.069 -0.047 0.107 0 0 0</pose><sensor name="camera" type="depth"><always_on>true</always_on><visualize>true</visualize><update_rate>30</update_rate><camera name="intel_realsense_r200"><horizontal_fov>1.02974</horizontal_fov><image><width>640</width><height>480</height><format>R8G8B8</format></image><clip><near>0.02</near><far>300</far></clip><noise><type>gaussian</type><!-- Noise is sampled independently per pixel on each frame.That pixel's noise value is added to each of its colorchannels, which at that point lie in the range [0,1]. --><mean>0.0</mean><stddev>0.007</stddev></noise></camera><plugin name="camera_driver" filename="libgazebo_ros_camera.so"><ros><!-- <namespace>test_cam</namespace> --><!-- <remapping>image_raw:=image_demo</remapping> --><!-- <remapping>camera_info:=camera_info_demo</remapping> --></ros><!-- camera_name>omit so it defaults to sensor name</camera_name--><!-- frame_name>omit so it defaults to link name</frameName--><!-- <hack_baseline>0.07</hack_baseline> --></plugin></sensor></link> <joint name="base_joint" type="fixed"><parent>base_footprint</parent><child>base_link</child><pose>0.0 0.0 0.010 0 0 0</pose></joint><joint name="wheel_left_joint" type="revolute"><parent>base_link</parent><child>wheel_left_link</child><pose>0.0 0.144 0.023 -1.57 0 0</pose><axis><xyz>0 0 1</xyz></axis></joint><joint name="wheel_right_joint" type="revolute"><parent>base_link</parent><child>wheel_right_link</child><pose>0.0 -0.144 0.023 -1.57 0 0</pose><axis><xyz>0 0 1</xyz></axis></joint><joint name='caster_back_right_joint' type='ball'><parent>base_link</parent><child>caster_back_right_link</child></joint><joint name='caster_back_left_joint' type='ball'><parent>base_link</parent><child>caster_back_left_link</child></joint><joint name="imu_joint" type="fixed"><parent>base_link</parent><child>imu_link</child><pose>-0.032 0 0.068 0 0 0</pose><axis><xyz>0 0 1</xyz></axis></joint> <joint name="lidar_joint" type="fixed"><parent>base_link</parent><child>base_scan</child><pose>-0.064 0 0.121 0 0 0</pose><axis><xyz>0 0 1</xyz></axis></joint><joint name="camera_joint" type="fixed"><parent>base_link</parent><child>camera_link</child><pose>0.064 -0.065 0.094 0 0 0</pose><axis><xyz>0 0 1</xyz></axis></joint><joint name="camera_rgb_optical_joint" type="fixed"><parent>camera_rgb_frame</parent><child>camera_rgb_optical_frame</child><pose>0 0 0 -1.57079632679 0 -1.57079632679</pose><axis><xyz>0 0 1</xyz></axis></joint> <joint name="camera_rgb_joint" type="fixed"><parent>camera_link</parent><child>camera_rgb_frame</child><pose>0.005 0.018 0.013 0 0 0</pose><axis><xyz>0 0 1</xyz></axis></joint><plugin name="turtlebot3_diff_drive" filename="libgazebo_ros_diff_drive.so"><ros><!-- <namespace>/tb3</namespace> --></ros><update_rate>30</update_rate><!-- wheels --><left_joint>wheel_left_joint</left_joint><right_joint>wheel_right_joint</right_joint><!-- kinematics --><wheel_separation>0.287</wheel_separation><wheel_diameter>0.066</wheel_diameter><!-- limits --><max_wheel_torque>20</max_wheel_torque><max_wheel_acceleration>1.0</max_wheel_acceleration><command_topic>cmd_vel</command_topic><!-- output --><publish_odom>true</publish_odom><publish_odom_tf>true</publish_odom_tf><publish_wheel_tf>false</publish_wheel_tf><odometry_topic>odom</odometry_topic><odometry_frame>odom</odometry_frame><robot_base_frame>base_footprint</robot_base_frame></plugin><plugin name="turtlebot3_joint_state" filename="libgazebo_ros_joint_state_publisher.so"><ros><!-- <namespace>/tb3</namespace> --><remapping>~/out:=joint_states</remapping></ros><update_rate>30</update_rate><joint_name>wheel_left_joint</joint_name><joint_name>wheel_right_joint</joint_name></plugin> </model>
</sdf>三、启动
ros2 launch rtabmap_demos turtlebot3_rgbd.launch.py 
#启动导航
ros2 launch nav2_bringup navigation_launch.py use_sim_time:=True
ros2 launch nav2_bringup rviz_launch.py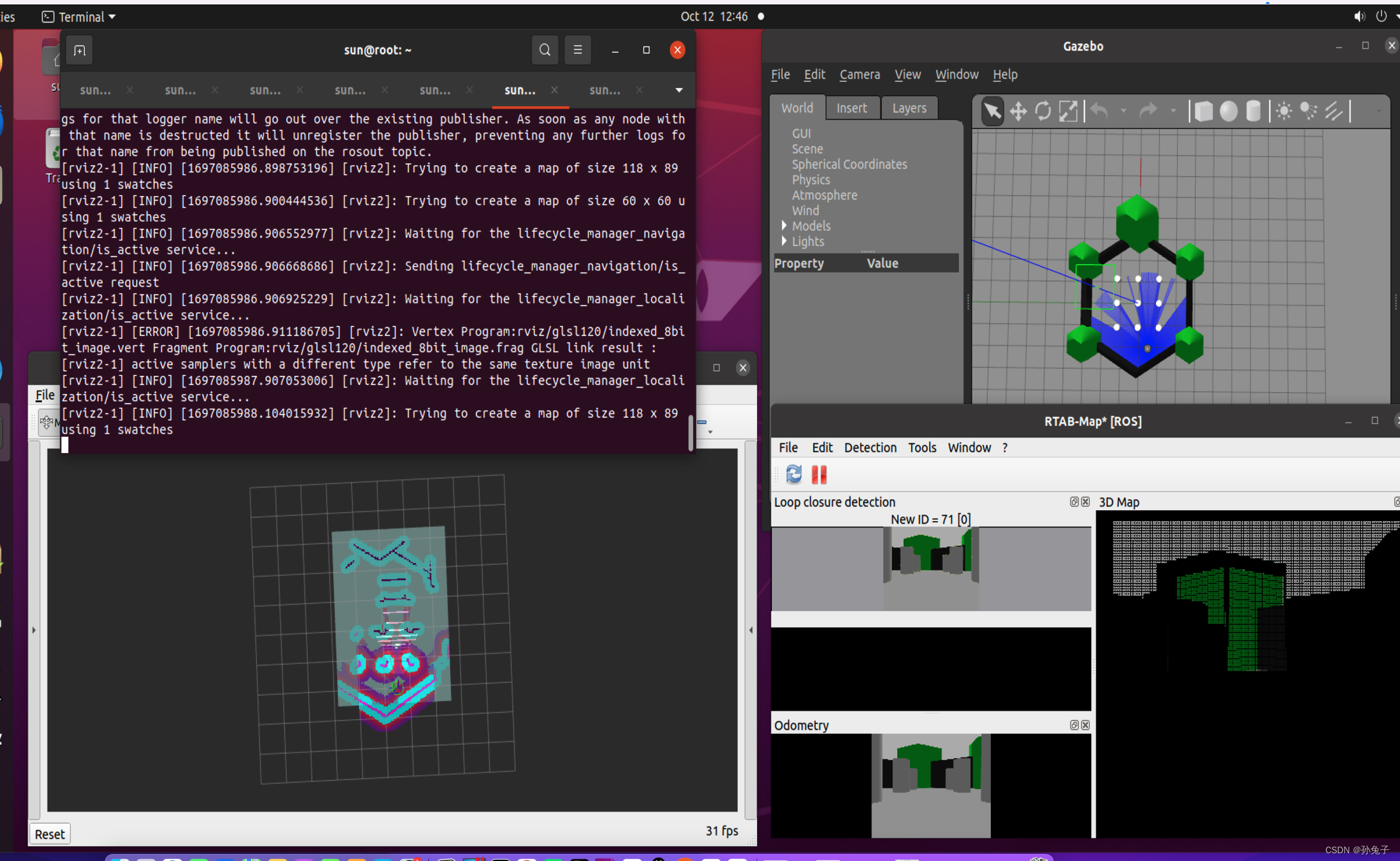 但是唯一不幸的是rviz一直崩掉!
但是唯一不幸的是rviz一直崩掉!