Avoiding Branch Divergence
有时,控制流依赖于thread索引。同一个warp中,一个条件分支可能导致很差的性能。通过重新组织数据获取模式可以减少或避免warp divergence(该问题的解释请查看warp解析篇)。
The Parallel Reduction Problem
我们现在要计算一个数组N个元素的和。这个过程用CPU编程很容易实现:
int sum = 0;
for (int i = 0; i < N; i++)sum += array[i];那么如果Array的元素非常多呢?应用并行计算可以大大提升这个过程的效率。鉴于加法的交换律等性质,这个求和过程可以以元素的任意顺序来进行:
- 将输入数组切割成很多小的块。
- 用thread来计算每个块的和。
- 对这些块的结果再求和得最终结果。
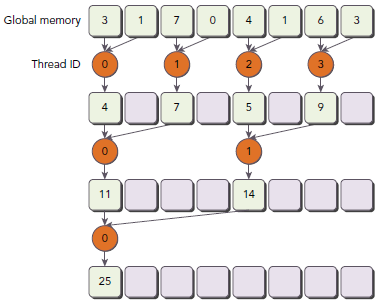
数组的切割主旨是,用thread求数组中按一定规律配对的的两个元素和,然后将所有结果组合成一个新的数组,然后再次求配对两元素和,多次迭代,直到数组中只有一个结果。
比较直观的两种实现方式是:
- Neighbored pair:每次迭代都是相邻两个元素求和。
- Interleaved pair:按一定跨度配对两个元素。
下图展示了两种方式的求解过程,对于有N个元素的数组,这个过程需要N-1次求和,log(N)步。Interleaved pair的跨度是半个数组长度。

下面是用递归实现的interleaved pair代码(host):
int recursiveReduce(int *data, int const size) {// terminate checkif (size == 1) return data[0];// renew the strideint const stride = size / 2;// in-place reductionfor (int i = 0; i < stride; i++) {data[i] += data[i + stride];}// call recursivelyreturn recursiveReduce(data, stride);
}上述讲的这类问题术语叫reduction problem。Parallel reduction(并行规约)是指迭代减少操作,是并行算法中非常关键的一种操作。
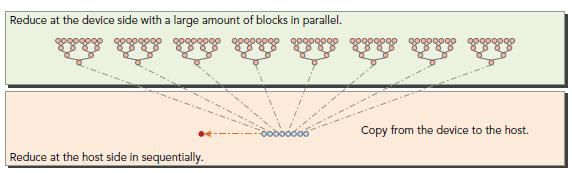
在这个kernel里面,有两个global memory array,一个用来存放数组所有数据,另一个用来存放部分和。所有block独立的执行求和操作。__syncthreads(关于同步,请看前文)用来保证每次迭代,所有的求和操作都做完,然后进入下一步迭代。
__global__ void reduceNeighbored(int *g_idata, int *g_odata, unsigned int n) {// set thread IDunsigned int tid = threadIdx.x;// convert global data pointer to the local pointer of this blockint *idata = g_idata + blockIdx.x * blockDim.x;// boundary checkif (idx >= n) return;// in-place reduction in global memoryfor (int stride = 1; stride < blockDim.x; stride *= 2) {if ((tid % (2 * stride)) == 0) {idata[tid] += idata[tid + stride];}// synchronize within block__syncthreads();}// write result for this block to global memif (tid == 0) g_odata[blockIdx.x] = idata[0];
}因为没有办法让所有的block同步,所以最后将所有block的结果送回host来进行串行计算,如下图所示:
int main(int argc, char **argv) {
// set up device
int dev = 0;
cudaDeviceProp deviceProp;
cudaGetDeviceProperties(&deviceProp, dev);
printf("%s starting reduction at ", argv[0]);
printf("device %d: %s ", dev, deviceProp.name);
cudaSetDevice(dev);
bool bResult = false;
// initialization
int size = 1<<24; // total number of elements to reduce
printf(" with array size %d ", size);
// execution configuration
int blocksize = 512; // initial block size
if(argc > 1) {
blocksize = atoi(argv[1]); // block size from command line argument
}
dim3 block (blocksize,1);
dim3 grid ((size+block.x-1)/block.x,1);
printf("grid %d block %d\n",grid.x, block.x);
// allocate host memory
size_t bytes = size * sizeof(int);
int *h_idata = (int *) malloc(bytes);
int *h_odata = (int *) malloc(grid.x*sizeof(int));
int *tmp = (int *) malloc(bytes);
// initialize the array
for (int i = 0; i < size; i++) {
// mask off high 2 bytes to force max number to 255
h_idata[i] = (int)(rand() & 0xFF);
}
memcpy (tmp, h_idata, bytes);
size_t iStart,iElaps;
int gpu_sum = 0;
// allocate device memory
int *d_idata = NULL;
int *d_odata = NULL;
cudaMalloc((void **) &d_idata, bytes);
cudaMalloc((void **) &d_odata, grid.x*sizeof(int));
// cpu reduction
iStart = seconds ();
int cpu_sum = recursiveReduce(tmp, size);
iElaps = seconds () - iStart;
printf("cpu reduce elapsed %d ms cpu_sum: %d\n",iElaps,cpu_sum);
// kernel 1: reduceNeighbored
cudaMemcpy(d_idata, h_idata, bytes, cudaMemcpyHostToDevice);
cudaDeviceSynchronize();
iStart = seconds ();
warmup<<<grid, block>>>(d_idata, d_odata, size);
cudaDeviceSynchronize();
iElaps = seconds () - iStart;
cudaMemcpy(h_odata, d_odata, grid.x*sizeof(int), cudaMemcpyDeviceToHost);
gpu_sum = 0;
for (int i=0; i<grid.x; i++) gpu_sum += h_odata[i];
printf("gpu Warmup elapsed %d ms gpu_sum: %d <<<grid %d block %d>>>\n",
iElaps,gpu_sum,grid.x,block.x);
// kernel 1: reduceNeighbored
cudaMemcpy(d_idata, h_idata, bytes, cudaMemcpyHostToDevice);
cudaDeviceSynchronize();
iStart = seconds ();
reduceNeighbored<<<grid, block>>>(d_idata, d_odata, size);
cudaDeviceSynchronize();
iElaps = seconds () - iStart;
cudaMemcpy(h_odata, d_odata, grid.x*sizeof(int), cudaMemcpyDeviceToHost);
gpu_sum = 0;
for (int i=0; i<grid.x; i++) gpu_sum += h_odata[i];
printf("gpu Neighbored elapsed %d ms gpu_sum: %d <<<grid %d block %d>>>\n",
iElaps,gpu_sum,grid.x,block.x);
cudaDeviceSynchronize();
iElaps = seconds() - iStart;
cudaMemcpy(h_odata, d_odata, grid.x/8*sizeof(int), cudaMemcpyDeviceToHost);
gpu_sum = 0;
for (int i = 0; i < grid.x / 8; i++) gpu_sum += h_odata[i];
printf("gpu Cmptnroll elapsed %d ms gpu_sum: %d <<<grid %d block %d>>>\n",
iElaps,gpu_sum,grid.x/8,block.x);
/// free host memory
free(h_idata);
free(h_odata);
// free device memory
cudaFree(d_idata);
cudaFree(d_odata);
// reset device
cudaDeviceReset();
// check the results
bResult = (gpu_sum == cpu_sum);
if(!bResult) printf("Test failed!\n");
return EXIT_SUCCESS;
}初始化数组,使其包含16M元素:
int size = 1<<24;
kernel配置为1D grid和1D block:
dim3 block (blocksize, 1); dim3 block ((siize + block.x – 1) / block.x, 1);
编译:
$ nvcc -O3 -arch=sm_20 reduceInteger.cu -o reduceInteger
运行:
$ ./reduceInteger starting reduction at device 0: Tesla M2070 with array size 16777216 grid 32768 block 512 cpu reduce elapsed 29 ms cpu_sum: 2139353471 gpu Neighbored elapsed 11 ms gpu_sum: 2139353471 <<<grid 32768 block 512>>> Improving Divergence in Parallel Reduction
考虑上节if判断条件:
if ((tid % (2 * stride)) == 0)
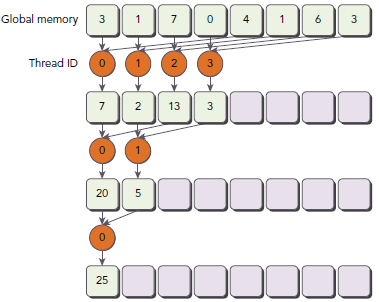
因为这表达式只对偶数ID的线程为true,所以其导致很高的divergent warps。第一次迭代只有偶数ID的线程执行了指令,但是所有线程都要被调度;第二次迭代,只有四分之的thread是active的,但是所有thread仍然要被调度。我们可以重新组织每个线程对应的数组索引来强制ID相邻的thread来处理求和操作。如下图所示(注意途中的Thread ID与上一个图的差别):
新的代码:
__global__ void reduceNeighboredLess (int *g_idata, int *g_odata, unsigned int n) {// set thread IDunsigned int tid = threadIdx.x;unsigned int idx = blockIdx.x * blockDim.x + threadIdx.x;// convert global data pointer to the local pointer of this blockint *idata = g_idata + blockIdx.x*blockDim.x;// boundary checkif(idx >= n) return;// in-place reduction in global memoryfor (int stride = 1; stride < blockDim.x; stride *= 2) {// convert tid into local array indexint index = 2 * stride * tid;if (index < blockDim.x) {idata[index] += idata[index + stride];} // synchronize within threadblock__syncthreads();}// write result for this block to global memif (tid == 0) g_odata[blockIdx.x] = idata[0];
}注意这行代码:
int index = 2 * stride * tid;
因为步调乘以了2,下面的语句使用block的前半部分thread来执行求和:
if (index < blockDim.x)
对于一个有512个thread的block来说,前八个warp执行第一轮reduction,剩下八个warp什么也不干;第二轮,前四个warp执行,剩下十二个什么也不干。因此,就彻底不存在divergence了(重申,divergence只发生于同一个warp)。最后的五轮还是会导致divergence,因为这个时候需要执行threads已经凑不够一个warp了。
// kernel 2: reduceNeighbored with less divergence
cudaMemcpy(d_idata, h_idata, bytes, cudaMemcpyHostToDevice);
cudaDeviceSynchronize();
iStart = seconds();
reduceNeighboredLess<<<grid, block>>>(d_idata, d_odata, size);
cudaDeviceSynchronize();
iElaps = seconds() - iStart;
cudaMemcpy(h_odata, d_odata, grid.x*sizeof(int), cudaMemcpyDeviceToHost);
gpu_sum = 0;
for (int i=0; i<grid.x; i++) gpu_sum += h_odata[i];
printf("gpu Neighbored2 elapsed %d ms gpu_sum: %d <<<grid %d block %d>>>\n",iElaps,gpu_sum,grid.x,block.x);运行结果:
$ ./reduceInteger Starting reduction at device 0: Tesla M2070
vector size 16777216 grid 32768 block 512
cpu reduce elapsed 0.029138 sec cpu_sum: 2139353471
gpu Neighbored elapsed 0.011722 sec gpu_sum: 2139353471 <<<grid 32768 block 512>>>
gpu NeighboredL elapsed 0.009321 sec gpu_sum: 2139353471 <<<grid 32768 block 512>>>新的实现比原来的快了1.26。我们也可以使用nvprof的inst_per_warp参数来查看每个warp上执行的指令数目的平均值。
$ nvprof --metrics inst_per_warp ./reduceInteger
输出,原来的是新的kernel的两倍还多,因为原来的有许多不必要的操作也执行了:
Neighbored Instructions per warp 295.562500 NeighboredLess Instructions per warp 115.312500
再查看throughput:
$ nvprof --metrics gld_throughput ./reduceInteger
输出,新的kernel拥有更大的throughput,因为虽然I/O操作数目相同,但是其耗时短:
Neighbored Global Load Throughput 67.663GB/s NeighboredL Global Load Throughput 80.144GB/s Reducing with Interleaved Pairs
Interleaved Pair模式的初始步调是block大小的一半,每个thread处理像个半个block的两个数据求和。和之前的图示相比,工作的thread数目没有变化,但是,每个thread的load/store global memory的位置是不同的。
Interleaved Pair的kernel实现:
/// Interleaved Pair Implementation with less divergence
__global__ void reduceInterleaved (int *g_idata, int *g_odata, unsigned int n) {
// set thread ID
unsigned int tid = threadIdx.x;
unsigned int idx = blockIdx.x * blockDim.x + threadIdx.x;
// convert global data pointer to the local pointer of this block
int *idata = g_idata + blockIdx.x * blockDim.x;
// boundary check
if(idx >= n) return;
// in-place reduction in global memory
for (int stride = blockDim.x / 2; stride > 0; stride >>= 1) {
if (tid < stride) {
idata[tid] += idata[tid + stride];
}
__syncthreads();
}
// write result for this block to global mem
if (tid == 0) g_odata[blockIdx.x] = idata[0];
}
注意下面的语句,步调被初始化为block大小的一半:
for (int stride = blockDim.x / 2; stride > 0; stride >>= 1) {
下面的语句使得第一次迭代时,block的前半部分thread执行相加操作,第二次是前四分之一,以此类推:
if (tid < stride)
下面是加入main的代码:
cudaMemcpy(d_idata, h_idata, bytes, cudaMemcpyHostToDevice);
cudaDeviceSynchronize();
iStart = seconds();
reduceInterleaved <<< grid, block >>> (d_idata, d_odata, size);
cudaDeviceSynchronize();
iElaps = seconds() - iStart;
cudaMemcpy(h_odata, d_odata, grid.x*sizeof(int), cudaMemcpyDeviceToHost);
gpu_sum = 0;
for (int i = 0; i < grid.x; i++) gpu_sum += h_odata[i];
printf("gpu Interleaved elapsed %f sec gpu_sum: %d <<<grid %d block %d>>>\n",iElaps,gpu_sum,grid.x,block.x);运行输出
$ ./reduce starting reduction at device 0: Tesla M2070
with array size 16777216 grid 32768 block 512
cpu reduce elapsed 0.029138 sec cpu_sum: 2139353471
gpu Warmup elapsed 0.011745 sec gpu_sum: 2139353471 <<<grid 32768 block 512>>>
gpu Neighbored elapsed 0.011722 sec gpu_sum: 2139353471 <<<grid 32768 block 512>>>
gpu NeighboredL elapsed 0.009321 sec gpu_sum: 2139353471 <<<grid 32768 block 512>>>
gpu Interleaved elapsed 0.006967 sec gpu_sum: 2139353471 <<<grid 32768 block 512>>>这次相对第一个kernel又快了1.69,比第二个也快了1.34。这个效果主要由global memory的load/store模式导致的(这部分知识将在后续博文介绍)。
UNrolling Loops
loop unrolling 是用来优化循环减少分支的方法,该方法简单说就是把本应在多次loop中完成的操作,尽量压缩到一次loop。循环体展开程度称为loop unrolling factor(循环展开因子),loop unrolling对顺序数组的循环操作性能有很大影响,考虑如下代码:
for (int i = 0; i < 100; i++) {a[i] = b[i] + c[i];
}
如下重复一次循环体操作,迭代数目将减少一半:
for (int i = 0; i < 100; i += 2) {a[i] = b[i] + c[i];a[i+1] = b[i+1] + c[i+1];
}
从高级语言层面是无法看出性能提升的原因的,需要从low-level instruction层面去分析,第二段代码循环次数减少了一半,而循环体两句语句的读写操作的执行在CPU上是可以同时执行互相独立的,所以相对第一段,第二段性能要好。
Unrolling 在CUDA编程中意义更重。我们的目标依然是通过减少指令执行消耗,增加更多的独立指令来提高性能。这样就会增加更多的并行操作从而产生更高的指令和内存带宽(bandwidth)。也就提供了更多的eligible warps来帮助hide instruction/memory latency 。
Reducing with Unrolling
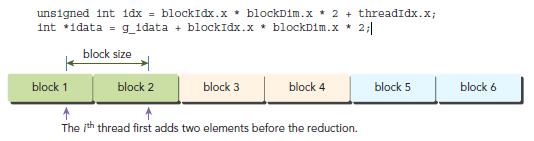
在前文的reduceInterleaved中,每个block处理一部分数据,我们给这数据起名data block。下面的代码是reduceInterleaved的修正版本,每个block,都是以两个data block作为源数据进行操作,(前文中,每个block处理一个data block)。这是一种cyclic partitioning:每个thread作用于多个data block,并且从每个data block中取出一个元素处理。
__global__ void reduceUnrolling2 (int *g_idata, int *g_odata, unsigned int n) {// set thread IDunsigned int tid = threadIdx.x;unsigned int idx = blockIdx.x * blockDim.x * 2 + threadIdx.x;// convert global data pointer to the local pointer of this blockint *idata = g_idata + blockIdx.x * blockDim.x * 2;// unrolling 2 data blocksif (idx + blockDim.x < n) g_idata[idx] += g_idata[idx + blockDim.x];__syncthreads();// in-place reduction in global memoryfor (int stride = blockDim.x / 2; stride > 0; stride >>= 1) {if (tid < stride) {idata[tid] += idata[tid + stride];}// synchronize within threadblock__syncthreads();}// write result for this block to global memif (tid == 0) g_odata[blockIdx.x] = idata[0];
}注意下面的语句,每个thread从相邻的data block中取数据,这一步实际上就是将两个data block规约成一个。
if (idx + blockDim.x < n) g_idata[idx] += g_idata[idx+blockDim.x];
global array index也要相应的调整,因为,相对之前的版本,同样的数据,我们只需要原来一半的thread就能解决问题。要注意的是,这样做也会降低warp或block的并行性(因为thread少啦):
main增加下面代码:
cudaMemcpy(d_idata, h_idata, bytes, cudaMemcpyHostToDevice);
cudaDeviceSynchronize();
iStart = seconds();
reduceUnrolling2 <<< grid.x/2, block >>> (d_idata, d_odata, size);
cudaDeviceSynchronize();
iElaps = seconds() - iStart;
cudaMemcpy(h_odata, d_odata, grid.x/2*sizeof(int), cudaMemcpyDeviceToHost);
gpu_sum = 0;
for (int i = 0; i < grid.x / 2; i++) gpu_sum += h_odata[i];
printf("gpu Unrolling2 elapsed %f sec gpu_sum: %d <<<grid %d block %d>>>\n",iElaps,gpu_sum,grid.x/2,block.x);由于每个block处理两个data block,所以需要调整grid的配置:
reduceUnrolling2<<<grid.x / 2, block>>>(d_idata, d_odata, size);
运行输出:
gpu Unrolling2 elapsed 0.003430 sec gpu_sum: 2139353471 <<<grid 16384 block 512>>>
这样一次简单的操作就比原来的减少了3.42。我们在试试每个block处理4个和8个data block的情况:
reduceUnrolling4 : each threadblock handles 4 data blocks
reduceUnrolling8 : each threadblock handles 8 data blocks
加上这两个的输出是:
gpu Unrolling2 elapsed 0.003430 sec gpu_sum: 2139353471 <<<grid 16384 block 512>>> gpu Unrolling4 elapsed 0.001829 sec gpu_sum: 2139353471 <<<grid 8192 block 512>>> gpu Unrolling8 elapsed 0.001422 sec gpu_sum: 2139353471 <<<grid 4096 block 512>>>
可以看出,同一个thread中如果能有更多的独立的load/store操作,会产生更好的性能,因为这样做memory latency能够更好的被隐藏。我们可以使用nvprof的dram_read_throughput来验证:
$ nvprof --metrics dram_read_throughput ./reduceInteger
下面是输出结果,我们可以得出这样的结论,device read throughtput和unrolling程度是正比的:
Unrolling2 Device Memory Read Throughput 26.295GB/s Unrolling4 Device Memory Read Throughput 49.546GB/s Unrolling8 Device Memory Read Throughput 62.764GB/s Reducinng with Unrolled Warps
__syncthreads是用来同步block内部thread的(请看warp解析篇)。在reduction kernel中,他被用来在每次循环中年那个保证所有thread的写global memory的操作都已完成,这样才能进行下一阶段的计算。
那么,当kernel进行到只需要少于或等32个thread(也就是一个warp)呢?由于我们是使用的SIMT模式,warp内的thread 是有一个隐式的同步过程的。最后六次迭代可以用下面的语句展开:
if (tid < 32) {volatile int *vmem = idata;vmem[tid] += vmem[tid + 32];vmem[tid] += vmem[tid + 16];vmem[tid] += vmem[tid + 8];vmem[tid] += vmem[tid + 4];vmem[tid] += vmem[tid + 2];vmem[tid] += vmem[tid + 1];
}warp unrolling避免了__syncthreads同步操作,因为这一步本身就没必要。
这里注意下volatile修饰符,他告诉编译器每次执行赋值时必须将vmem[tid]的值store回global memory。如果不这样做的话,编译器或cache可能会优化我们读写global/shared memory。有了这个修饰符,编译器就会认为这个值会被其他thread修改,从而使得每次读写都直接去memory而不是去cache或者register。
__global__ void reduceUnrollWarps8 (int *g_idata, int *g_odata, unsigned int n) {// set thread IDunsigned int tid = threadIdx.x;unsigned int idx = blockIdx.x*blockDim.x*8 + threadIdx.x;// convert global data pointer to the local pointer of this blockint *idata = g_idata + blockIdx.x*blockDim.x*8;// unrolling 8if (idx + 7*blockDim.x < n) {int a1 = g_idata[idx];int a2 = g_idata[idx+blockDim.x];int a3 = g_idata[idx+2*blockDim.x];int a4 = g_idata[idx+3*blockDim.x];int b1 = g_idata[idx+4*blockDim.x];int b2 = g_idata[idx+5*blockDim.x];int b3 = g_idata[idx+6*blockDim.x];int b4 = g_idata[idx+7*blockDim.x];g_idata[idx] = a1+a2+a3+a4+b1+b2+b3+b4;}__syncthreads();// in-place reduction in global memoryfor (int stride = blockDim.x / 2; stride > 32; stride >>= 1) {if (tid < stride) {idata[tid] += idata[tid + stride];}// synchronize within threadblock__syncthreads();}// unrolling warpif (tid < 32) {volatile int *vmem = idata;vmem[tid] += vmem[tid + 32];vmem[tid] += vmem[tid + 16];vmem[tid] += vmem[tid + 8];vmem[tid] += vmem[tid + 4];vmem[tid] += vmem[tid + 2];vmem[tid] += vmem[tid + 1];}// write result for this block to global memif (tid == 0) g_odata[blockIdx.x] = idata[0];
}因为处理的data block变为八个,kernel调用变为;
reduceUnrollWarps8<<<grid.x / 8, block>>> (d_idata, d_odata, size);
这次执行结果比reduceUnnrolling8快1.05,比reduceNeighboured快8,65:
gpu UnrollWarp8 elapsed 0.001355 sec gpu_sum: 2139353471 <<<grid 4096 block 512>>>
nvprof的stall_sync可以用来验证由于__syncthreads导致更少的warp阻塞了:
$ nvprof --metrics stall_sync ./reduce Unrolling8 Issue Stall Reasons 58.37% UnrollWarps8 Issue Stall Reasons 30.60% Reducing with Complete Unrolling
如果在编译时已知了迭代次数,就可以完全把循环展开。Fermi和Kepler每个block的最大thread数目都是1024,博文中的kernel的迭代次数都是基于blockDim的,所以完全展开循环是可行的。
__global__ void reduceCompleteUnrollWarps8 (int *g_idata, int *g_odata,
unsigned int n) {// set thread IDunsigned int tid = threadIdx.x;unsigned int idx = blockIdx.x * blockDim.x * 8 + threadIdx.x;// convert global data pointer to the local pointer of this blockint *idata = g_idata + blockIdx.x * blockDim.x * 8;// unrolling 8if (idx + 7*blockDim.x < n) {int a1 = g_idata[idx];int a2 = g_idata[idx + blockDim.x];int a3 = g_idata[idx + 2 * blockDim.x];int a4 = g_idata[idx + 3 * blockDim.x];int b1 = g_idata[idx + 4 * blockDim.x];int b2 = g_idata[idx + 5 * blockDim.x];int b3 = g_idata[idx + 6 * blockDim.x];int b4 = g_idata[idx + 7 * blockDim.x];g_idata[idx] = a1 + a2 + a3 + a4 + b1 + b2 + b3 + b4;}__syncthreads();// in-place reduction and complete unrollif (blockDim.x>=1024 && tid < 512) idata[tid] += idata[tid + 512];__syncthreads();if (blockDim.x>=512 && tid < 256) idata[tid] += idata[tid + 256];__syncthreads();if (blockDim.x>=256 && tid < 128) idata[tid] += idata[tid + 128];__syncthreads();if (blockDim.x>=128 && tid < 64) idata[tid] += idata[tid + 64];__syncthreads();// unrolling warpif (tid < 32) {volatile int *vsmem = idata;vsmem[tid] += vsmem[tid + 32];vsmem[tid] += vsmem[tid + 16];vsmem[tid] += vsmem[tid + 8];vsmem[tid] += vsmem[tid + 4];vsmem[tid] += vsmem[tid + 2];vsmem[tid] += vsmem[tid + 1];}// write result for this block to global memif (tid == 0) g_odata[blockIdx.x] = idata[0];
}main中调用:
reduceCompleteUnrollWarps8<<<grid.x / 8, block>>>(d_idata, d_odata, size);
速度再次提升:
gpu CmptUnroll8 elapsed 0.001280 sec gpu_sum: 2139353471 <<<grid 4096 block 512>>>
Reducing with Templete Functions
CUDA代码支持模板,我们可以如下设置block大小:
template <unsigned int iBlockSize>
__global__ void reduceCompleteUnroll(int *g_idata, int *g_odata, unsigned int n) {
// set thread ID
unsigned int tid = threadIdx.x;
unsigned int idx = blockIdx.x * blockDim.x * 8 + threadIdx.x;// convert global data pointer to the local pointer of this block
int *idata = g_idata + blockIdx.x * blockDim.x * 8;// unrolling 8
if (idx + 7*blockDim.x < n) {
int a1 = g_idata[idx];
int a2 = g_idata[idx + blockDim.x];
int a3 = g_idata[idx + 2 * blockDim.x];
int a4 = g_idata[idx + 3 * blockDim.x];
int b1 = g_idata[idx + 4 * blockDim.x];
int b2 = g_idata[idx + 5 * blockDim.x];
int b3 = g_idata[idx + 6 * blockDim.x];
int b4 = g_idata[idx + 7 * blockDim.x];
g_idata[idx] = a1+a2+a3+a4+b1+b2+b3+b4;
}
__syncthreads();// in-place reduction and complete unroll
if (iBlockSize>=1024 && tid < 512) idata[tid] += idata[tid + 512];
__syncthreads();if (iBlockSize>=512 && tid < 256) idata[tid] += idata[tid + 256];
__syncthreads();if (iBlockSize>=256 && tid < 128) idata[tid] += idata[tid + 128];
__syncthreads();if (iBlockSize>=128 && tid < 64) idata[tid] += idata[tid + 64];
__syncthreads();// unrolling warp
if (tid < 32) {
volatile int *vsmem = idata;
vsmem[tid] += vsmem[tid + 32];
vsmem[tid] += vsmem[tid + 16];
vsmem[tid] += vsmem[tid + 8];
vsmem[tid] += vsmem[tid + 4];
vsmem[tid] += vsmem[tid + 2];
vsmem[tid] += vsmem[tid + 1];
}// write result for this block to global mem
if (tid == 0) g_odata[blockIdx.x] = idata[0];
}
对于if的条件,如果值为false,那么在编译时就会去掉该语句,这样效率更好。例如,如果调用kernel时的blocksize是256,那么,下面的语句将永远为false,编译器会将他移除不予执行:
IBlockSize>=1024 && tid < 512
这个kernel必须以一个switch-case来调用:
switch (blocksize) {case 1024:reduceCompleteUnroll<1024><<<grid.x/8, block>>>(d_idata, d_odata, size);break;case 512:reduceCompleteUnroll<512><<<grid.x/8, block>>>(d_idata, d_odata, size);break;case 256:reduceCompleteUnroll<256><<<grid.x/8, block>>>(d_idata, d_odata, size);break;case 128:reduceCompleteUnroll<128><<<grid.x/8, block>>>(d_idata, d_odata, size);break;case 64:reduceCompleteUnroll<64><<<grid.x/8, block>>>(d_idata, d_odata, size);break;
}各种情况下,执行后的结果为:

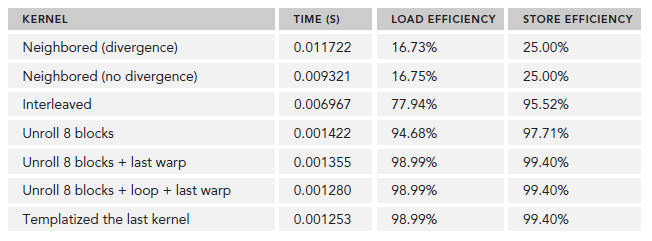
$nvprof --metrics gld_efficiency,gst_efficiency ./reduceInteger