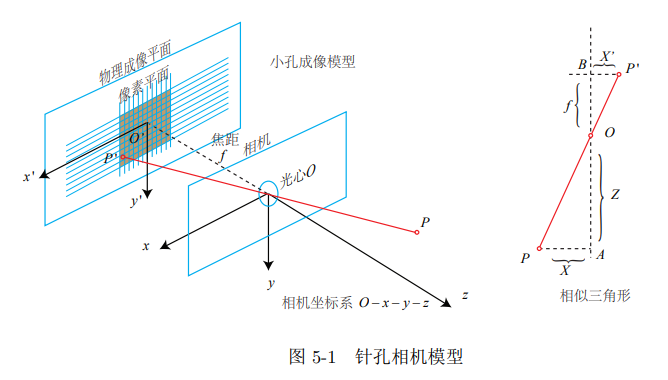
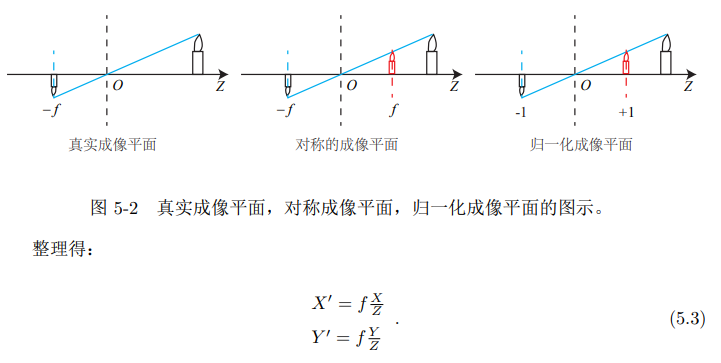
相机模型
基本模型
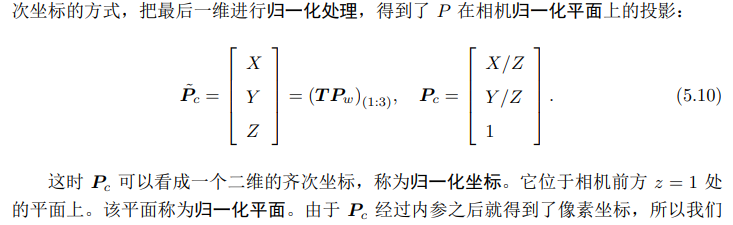
内参
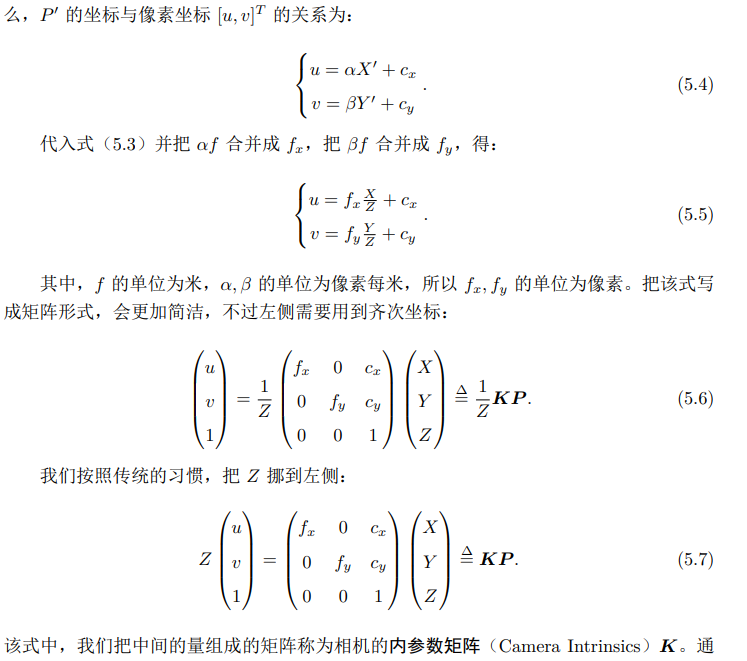
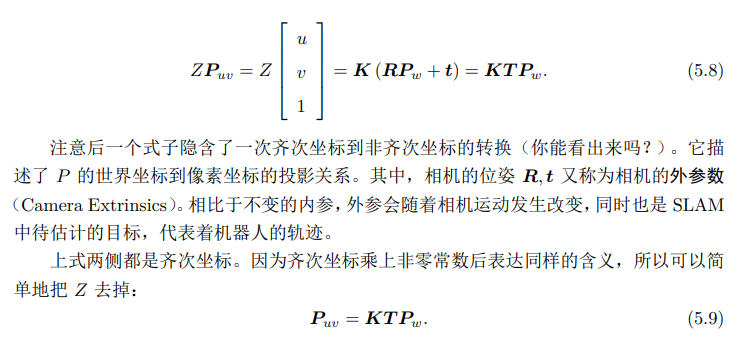
外参
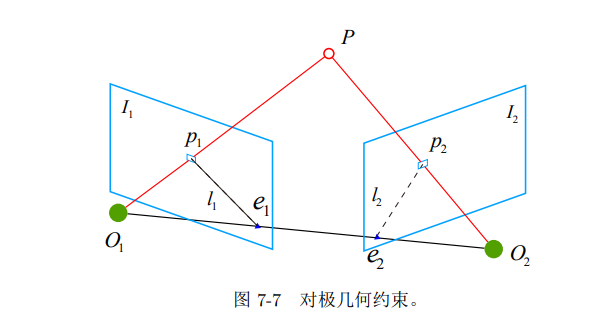
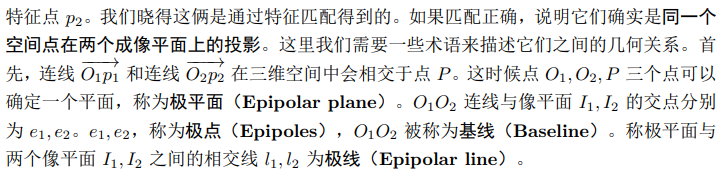
对极几何
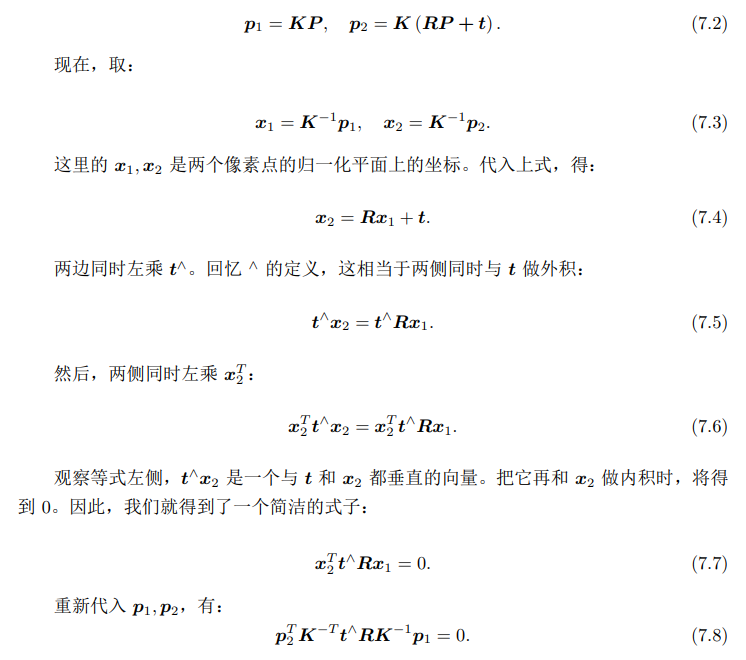
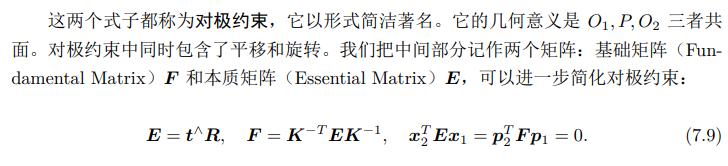
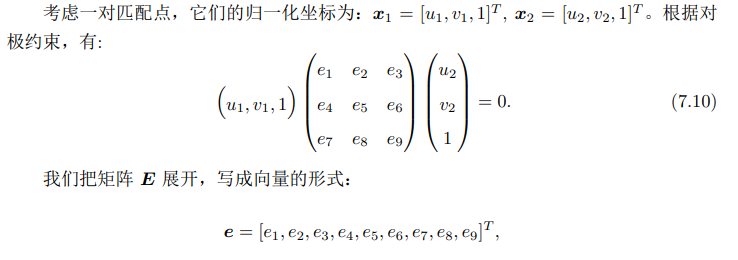
对极约束
外积符号

基础矩阵F和本质矩阵E
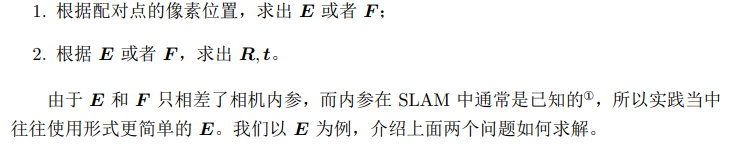
相机姿态估计问题分为如下两步:
本质矩阵
E = t ∧ R E=t^{\wedge}R E=t∧R因为 t ∧ t^{\wedge} t∧其实就是个3x3的反对称矩阵,所以 E E E也是一个3x3的矩阵
用八点法估计E
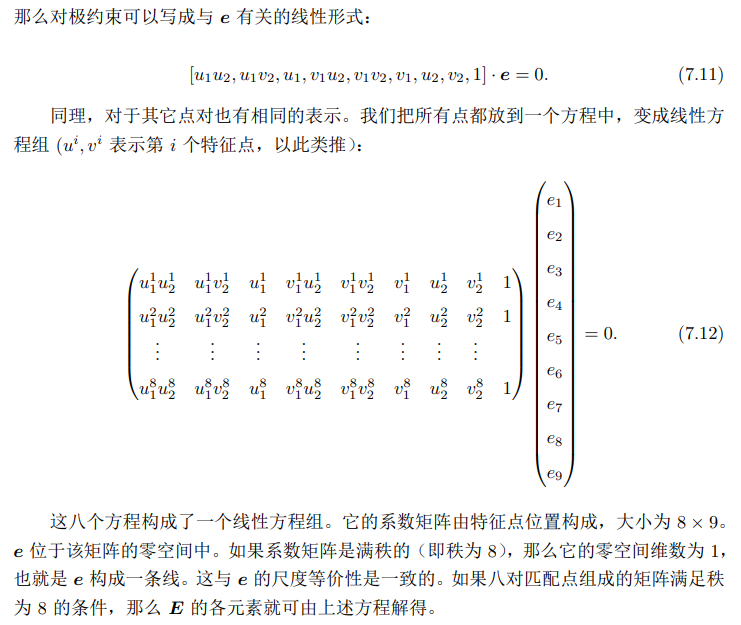
零空间矩阵的讲解
要通过E获得R和t就需要进行 E E E的奇异值(SVD)分解
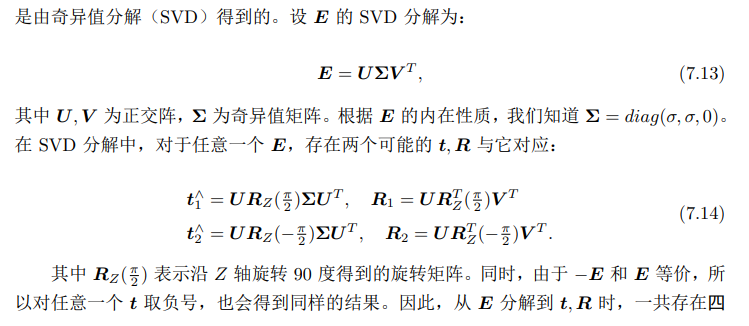

带入之后的看相机的正深度,就只有第一种情况满足
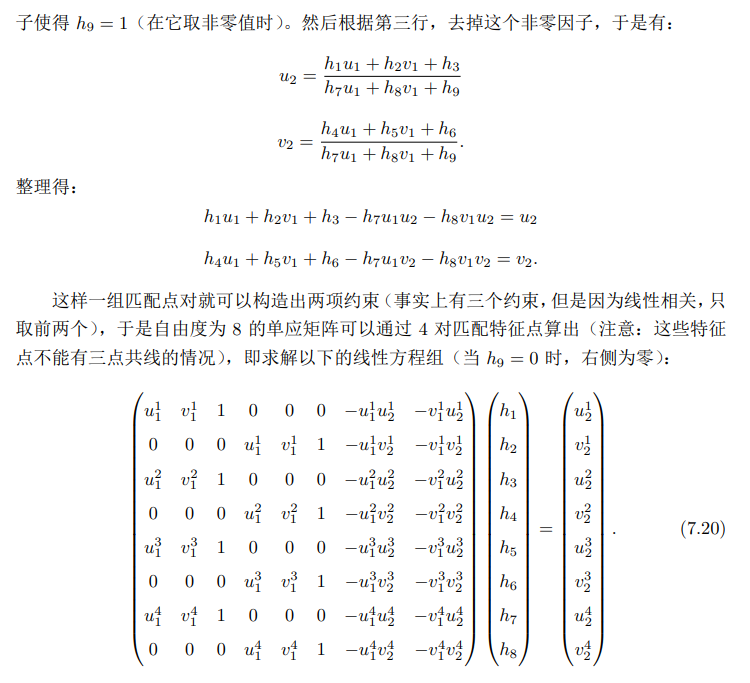
单应矩阵
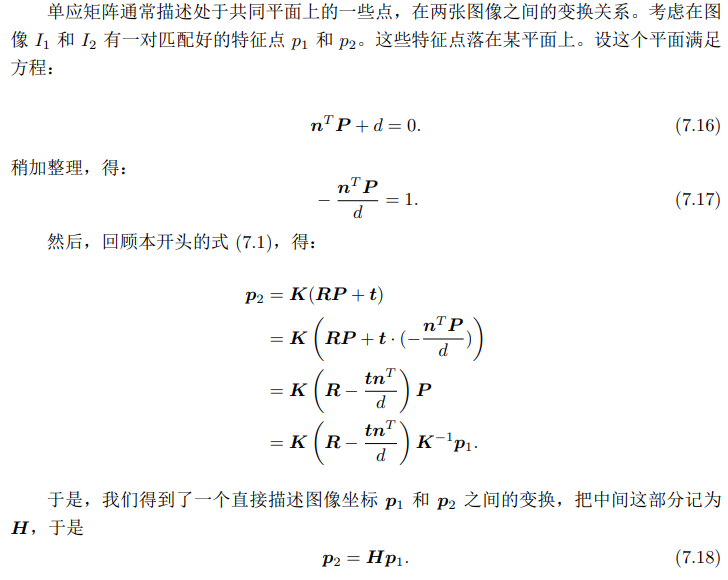

这个等式只有在非零因子情况下才成立,所以可以除以非零因子把 h 9 h_9 h9变为0
三角测量

3D-2D:PnP
直接线性变换
P3P
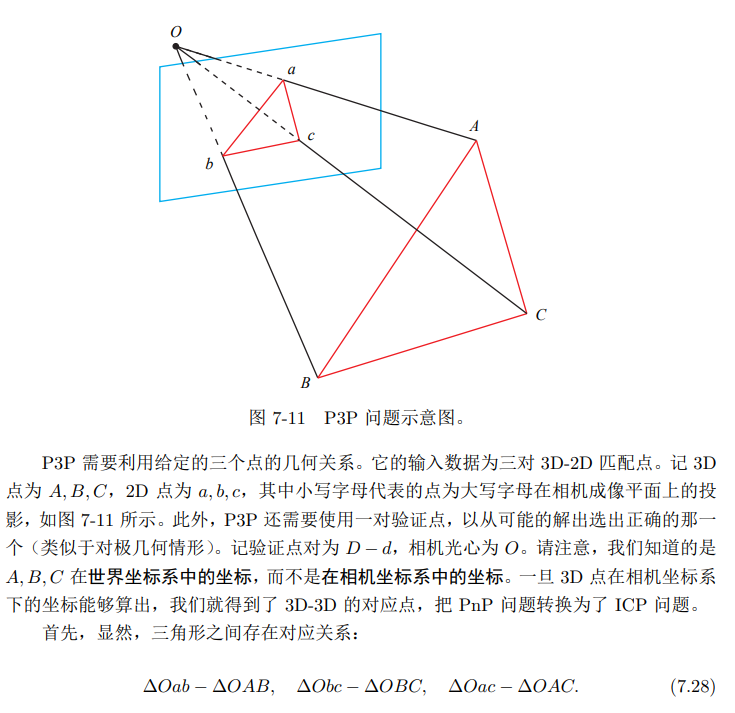
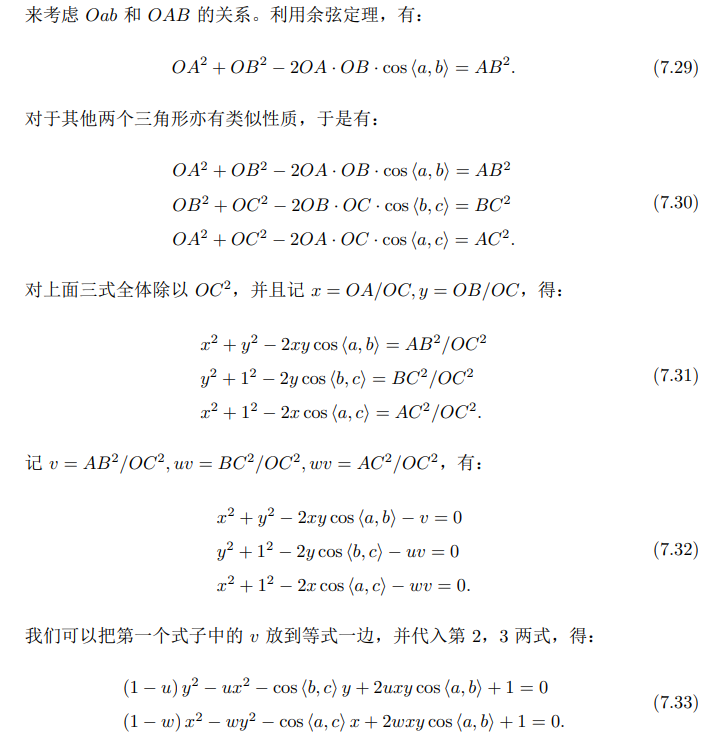
最后要求得未知量只有x,y,这是一个二元二次多项式方程,用吴消元法求解,最多得四个解,根据第四个点进行验证即可求得A,B,C 的3D坐标
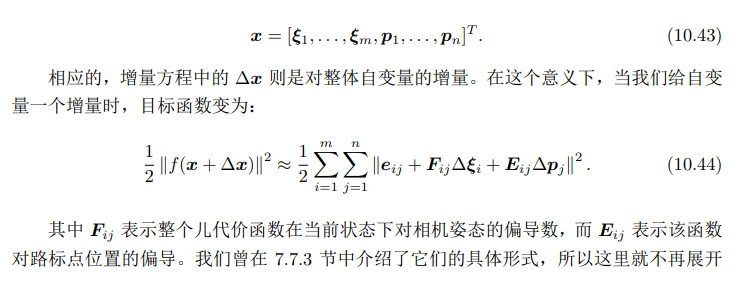
Bundle Ajustment

这部分略显复杂,建议直接看视觉SLAM十四讲