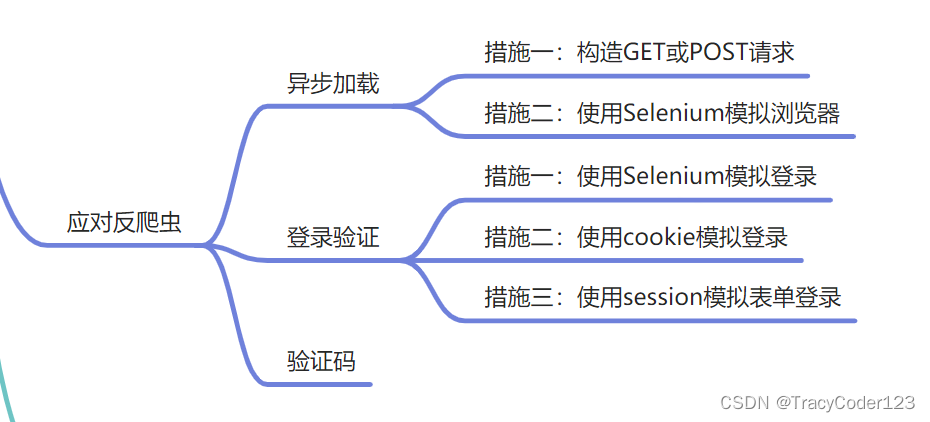
VX-3R本身是不带APRS功能的,不过可能通过外加TNC实现APRS功能。
有大佬已经用Arduino实现了相应的发射功能:
https://github.com/handiko/Arduino-APRS
我要做的,就是简单修改一下代码,做一个转接板。
YEASU官方没有给出VX-3R的音频接口四节定义,估计是为了推销自家的CT-44,手册上只有这么一个图

在网上查了一圈,pinguide上有这么个图,然后提了一句“Pinouts for speaker and mic are reversed on the vx-3r”。但是经我实际验证,VX-3R的定义跟网站上是一样的,并没有reversed。
转接板原理图如下:

实物图如下:

值得注意的是,VX-3R的PTT是低电平发射。
完整的代码如下:
/** Copyright (C) 2018 - Handiko Gesang - www.github.com/handiko* * This program is free software: you can redistribute it and/or modify* it under the terms of the GNU General Public License as published by* the Free Software Foundation, either version 3 of the License, or* (at your option) any later version.* * This program is distributed in the hope that it will be useful,* but WITHOUT ANY WARRANTY; without even the implied warranty of* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the* GNU General Public License for more details.* * You should have received a copy of the GNU General Public License* along with this program. If not, see <https://www.gnu.org/licenses/>.*/
#include <math.h>
#include <stdio.h>// Defines the Square Wave Output Pin
#define OUT_PIN 2#define _1200 1
#define _2400 0#define _FLAG 0x7e
#define _CTRL_ID 0x03
#define _PID 0xf0
#define _DT_EXP ','
#define _DT_STATUS '>'
#define _DT_POS '!'#define _NORMAL 1
#define _BEACON 2#define _FIXPOS 1
#define _STATUS 2
#define _FIXPOS_STATUS 3#define _PTT 5bool nada = _2400;/** SQUARE WAVE SIGNAL GENERATION* * baud_adj lets you to adjust or fine tune overall baud rate* by simultaneously adjust the 1200 Hz and 2400 Hz tone,* so that both tone would scales synchronously.* adj_1200 determined the 1200 hz tone adjustment.* tc1200 is the half of the 1200 Hz signal periods.* * ------------------------- -------* | | |* | | |* | | |* ---- -------------------------* * |<------ tc1200 --------->|<------ tc1200 --------->|* * adj_2400 determined the 2400 hz tone adjustment.* tc2400 is the half of the 2400 Hz signal periods.* * ------------ ------------ -------* | | | | |* | | | | | * | | | | |* ---- ------------ ------------* * |<--tc2400-->|<--tc2400-->|<--tc2400-->|<--tc2400-->|* */
const float baud_adj = 0.975;
const float adj_1200 = 1.0 * baud_adj;
const float adj_2400 = 1.0 * baud_adj;
unsigned int tc1200 = (unsigned int)(0.5 * adj_1200 * 1000000.0 / 1200.0);
unsigned int tc2400 = (unsigned int)(0.5 * adj_2400 * 1000000.0 / 2400.0);/** This strings will be used to generate AFSK signals, over and over again.*/
const char *mycall = "BG7GF";
char myssid = 7;const char *dest = "APRS";
const char *dest_beacon = "BEACON";const char *digi = "WIDE2";
char digissid = 1;const char *mystatus = "Hello World, This is a simple Arduino APRS Transmitter !";const char *lat = "28XX.09N";
const char *lon = "112XX.62E";
const char sym_ovl = 'H';
const char sym_tab = 'a';unsigned int tx_delay = 5000;
unsigned int str_len = 400;char bit_stuff = 0;
unsigned short crc=0xffff;/** */
void set_nada_1200(void);
void set_nada_2400(void);
void set_nada(bool nada);void send_char_NRZI(unsigned char in_byte, bool enBitStuff);
void send_string_len(const char *in_string, int len);void calc_crc(bool in_bit);
void send_crc(void);void send_packet(char packet_type, char dest_type);
void send_flag(unsigned char flag_len);
void send_header(char msg_type);
void send_payload(char type);void set_io(void);
void print_code_version(void);
void print_debug(char type, char dest_type);/** */
void set_nada_1200(void)
{digitalWrite(OUT_PIN, HIGH);delayMicroseconds(tc1200);digitalWrite(OUT_PIN, LOW);delayMicroseconds(tc1200);
}void set_nada_2400(void)
{digitalWrite(OUT_PIN, HIGH);delayMicroseconds(tc2400);digitalWrite(OUT_PIN, LOW);delayMicroseconds(tc2400);digitalWrite(OUT_PIN, HIGH);delayMicroseconds(tc2400);digitalWrite(OUT_PIN, LOW);delayMicroseconds(tc2400);
}void set_nada(bool nada)
{if(nada)set_nada_1200();elseset_nada_2400();
}/** This function will calculate CRC-16 CCITT for the FCS (Frame Check Sequence)* as required for the HDLC frame validity check.* * Using 0x1021 as polynomial generator. The CRC registers are initialized with* 0xFFFF*/
void calc_crc(bool in_bit)
{unsigned short xor_in;xor_in = crc ^ in_bit;crc >>= 1;if(xor_in & 0x01)crc ^= 0x8408;
}void send_crc(void)
{unsigned char crc_lo = crc ^ 0xff;unsigned char crc_hi = (crc >> 8) ^ 0xff;send_char_NRZI(crc_lo, HIGH);send_char_NRZI(crc_hi, HIGH);
}void send_header(char msg_type)
{char temp;/** APRS AX.25 Header * ........................................................* | DEST | SOURCE | DIGI | CTRL FLD | PID |* --------------------------------------------------------* | 7 bytes | 7 bytes | 7 bytes | 0x03 | 0xf0 |* --------------------------------------------------------* * DEST : 6 byte "callsign" + 1 byte ssid* SOURCE : 6 byte your callsign + 1 byte ssid* DIGI : 6 byte "digi callsign" + 1 byte ssid* * ALL DEST, SOURCE, & DIGI are left shifted 1 bit, ASCII format.* DIGI ssid is left shifted 1 bit + 1* * CTRL FLD is 0x03 and not shifted.* PID is 0xf0 and not shifted.*//********* DEST ***********/if(msg_type == _NORMAL){temp = strlen(dest);for(int j=0; j<temp; j++)send_char_NRZI(dest[j] << 1, HIGH);}else if(msg_type == _BEACON){temp = strlen(dest_beacon);for(int j=0; j<temp; j++)send_char_NRZI(dest_beacon[j] << 1, HIGH);}if(temp < 6){for(int j=0; j<(6 - temp); j++)send_char_NRZI(' ' << 1, HIGH);}send_char_NRZI('0' << 1, HIGH);/********* SOURCE *********/temp = strlen(mycall);for(int j=0; j<temp; j++)send_char_NRZI(mycall[j] << 1, HIGH);if(temp < 6){for(int j=0; j<(6 - temp); j++)send_char_NRZI(' ' << 1, HIGH);}send_char_NRZI((myssid + '0') << 1, HIGH);/********* DIGI ***********/temp = strlen(digi);for(int j=0; j<temp; j++)send_char_NRZI(digi[j] << 1, HIGH);if(temp < 6){for(int j=0; j<(6 - temp); j++)send_char_NRZI(' ' << 1, HIGH);}send_char_NRZI(((digissid + '0') << 1) + 1, HIGH);/***** CTRL FLD & PID *****/send_char_NRZI(_CTRL_ID, HIGH);send_char_NRZI(_PID, HIGH);
}void send_payload(char type)
{/** APRS AX.25 Payloads* * TYPE : POSITION* ........................................................* |DATA TYPE | LAT |SYMB. OVL.| LON |SYMB. TBL.|* --------------------------------------------------------* | 1 byte | 8 bytes | 1 byte | 9 bytes | 1 byte |* --------------------------------------------------------* * DATA TYPE : !* LAT : ddmm.ssN or ddmm.ssS* LON : dddmm.ssE or dddmm.ssW* * * TYPE : STATUS* ..................................* |DATA TYPE | STATUS TEXT |* ----------------------------------* | 1 byte | N bytes |* ----------------------------------* * DATA TYPE : >* STATUS TEXT: Free form text* * * TYPE : POSITION & STATUS* ..............................................................................* |DATA TYPE | LAT |SYMB. OVL.| LON |SYMB. TBL.| STATUS TEXT |* ------------------------------------------------------------------------------* | 1 byte | 8 bytes | 1 byte | 9 bytes | 1 byte | N bytes |* ------------------------------------------------------------------------------* * DATA TYPE : !* LAT : ddmm.ssN or ddmm.ssS* LON : dddmm.ssE or dddmm.ssW* STATUS TEXT: Free form text* * * All of the data are sent in the form of ASCII Text, not shifted.* */if(type == _FIXPOS){send_char_NRZI(_DT_POS, HIGH);send_string_len(lat, strlen(lat));send_char_NRZI(sym_ovl, HIGH);send_string_len(lon, strlen(lon));send_char_NRZI(sym_tab, HIGH);}else if(type == _STATUS){send_char_NRZI(_DT_STATUS, HIGH);send_string_len(mystatus, strlen(mystatus));}else if(type == _FIXPOS_STATUS){send_char_NRZI(_DT_POS, HIGH);send_string_len(lat, strlen(lat));send_char_NRZI(sym_ovl, HIGH);send_string_len(lon, strlen(lon));send_char_NRZI(sym_tab, HIGH);send_char_NRZI(' ', HIGH);send_string_len(mystatus, strlen(mystatus));}
}/** This function will send one byte input and convert it* into AFSK signal one bit at a time LSB first.* * The encode which used is NRZI (Non Return to Zero, Inverted)* bit 1 : transmitted as no change in tone* bit 0 : transmitted as change in tone*/
void send_char_NRZI(unsigned char in_byte, bool enBitStuff)
{bool bits;for(int i = 0; i < 8; i++){bits = in_byte & 0x01;calc_crc(bits);if(bits){set_nada(nada);bit_stuff++;if((enBitStuff) && (bit_stuff == 5)){nada ^= 1;set_nada(nada);bit_stuff = 0;}}else{nada ^= 1;set_nada(nada);bit_stuff = 0;}in_byte >>= 1;}
}void send_string_len(const char *in_string, int len)
{for(int j=0; j<len; j++)send_char_NRZI(in_string[j], HIGH);
}void send_flag(unsigned char flag_len)
{for(int j=0; j<flag_len; j++)send_char_NRZI(_FLAG, LOW);
}/** In this preliminary test, a packet is consists of FLAG(s) and PAYLOAD(s).* Standard APRS FLAG is 0x7e character sent over and over again as a packet* delimiter. In this example, 100 flags is used the preamble and 3 flags as* the postamble.*/
void send_packet(char packet_type, char dest_type)
{print_debug(packet_type, dest_type);digitalWrite(LED_BUILTIN, 1);digitalWrite(_PTT, LOW);/** AX25 FRAME* * ........................................................* | FLAG(s) | HEADER | PAYLOAD | FCS(CRC) | FLAG(s) |* --------------------------------------------------------* | N bytes | 22 bytes | N bytes | 2 bytes | N bytes |* --------------------------------------------------------* * FLAG(s) : 0x7e* HEADER : see header* PAYLOAD : 1 byte data type + N byte info* FCS : 2 bytes calculated from HEADER + PAYLOAD*/send_flag(100);crc = 0xffff;send_header(dest_type);send_payload(packet_type);send_crc();send_flag(3);digitalWrite(_PTT, HIGH);digitalWrite(LED_BUILTIN, 0);
}/** Function to randomized the value of a variable with defined low and hi limit value.* Used to create random AFSK pulse length.*/
void randomize(unsigned int &var, unsigned int low, unsigned int high)
{var = random(low, high);
}/** */
void set_io(void)
{pinMode(LED_BUILTIN, OUTPUT);pinMode(OUT_PIN, OUTPUT);pinMode(_PTT, OUTPUT);digitalWrite(_PTT, HIGH);Serial.begin(115200);
}void print_code_version(void)
{Serial.println(" ");Serial.print("Sketch: "); Serial.println(__FILE__);Serial.print("Uploaded: "); Serial.println(__DATE__);Serial.println(" ");Serial.println("Random String Pulsed AFSK Generator - Started \n");
}void print_debug(char type, char dest_type)
{/** PROTOCOL DEBUG.* * Will outputs the transmitted data to the serial monitor* in the form of TNC2 string format.* * MYCALL-N>APRS,DIGIn-N:<PAYLOAD STRING> <CR><LF>*//****** MYCALL ********/Serial.print(mycall);Serial.print('-');Serial.print(myssid, DEC);Serial.print('>');/******** DEST ********/if(dest_type == _NORMAL){Serial.print(dest);}else if(dest_type == _BEACON){Serial.print(dest_beacon);}Serial.print(',');/******** DIGI ********/Serial.print(digi);Serial.print('-');Serial.print(digissid, DEC);Serial.print(':');/******* PAYLOAD ******/if(type == _FIXPOS){Serial.print(_DT_POS);Serial.print(lat);Serial.print(sym_ovl);Serial.print(lon);Serial.print(sym_tab);}else if(type == _STATUS){Serial.print(_DT_STATUS);Serial.print(mystatus);}else if(type == _FIXPOS_STATUS){Serial.print(_DT_POS);Serial.print(lat);Serial.print(sym_ovl);Serial.print(lon);Serial.print(sym_tab);Serial.print(' ');Serial.print(mystatus);}Serial.println(' ');
}/** */
void setup()
{set_io();print_code_version();
}void loop()
{send_packet(random(1,4), random(1,3));delay(tx_delay);randomize(tx_delay, 10, 5000);randomize(str_len, 10, 420);
}