前言
本节我们将学习到透视投影、齐次坐标系等基础知识,在这些基础知识上,进一步了解到相机的参数,相机参数分为相机外参和相机内参,相机外参是从世界坐标系到相机坐标系,相机内参是从相机坐标系到图像坐标系。
一、透视投影
首先让我们回顾一下上节学习的针孔相机模型。
• 所有光线相交于相机中心 (针孔),在相机后的图像平面成倒像
• 图像平面与相机的距离为焦距f,是相机的一项参数
• 在相机前假设存在虚像,与实像关于针孔呈中心对称
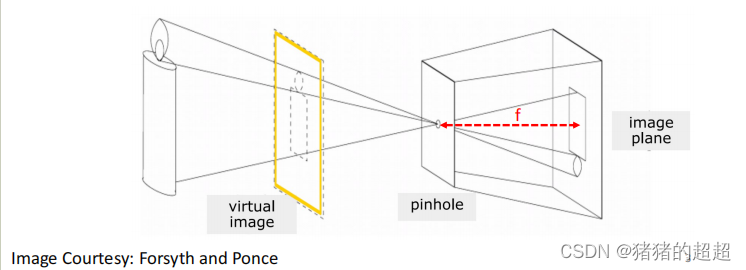
针孔模型将3D场景投影至2D平面,这个过程是典型的透视投影。
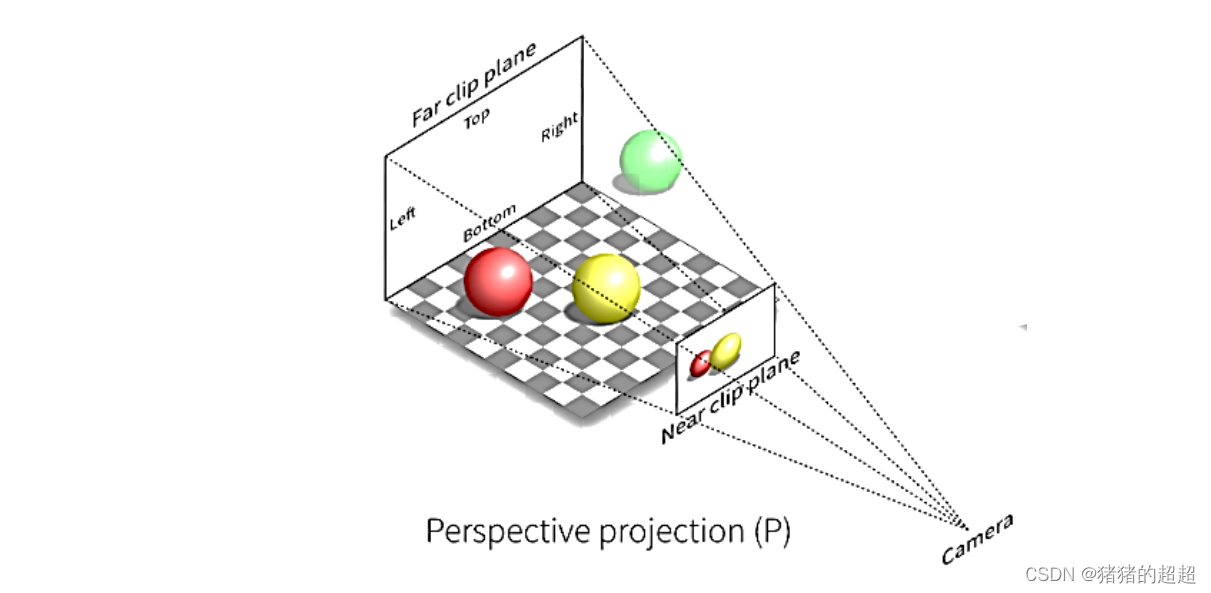
1.1 透视投影的性质
• 直线投影后仍是直线 (Line-preserving)
• 物体投影后的大小与原大小不一定相同,与距离成反比,近大远小 (Not length-preserving)
• 投影前后角度也会发生变化 (Not angle-preserving),即平行线投影后不再平行
• 同一方向上的所有平行线相交于一点,消逝点 (Vanishing point)
• 消逝点代表无穷远点,每个方向有且仅有一个消逝点

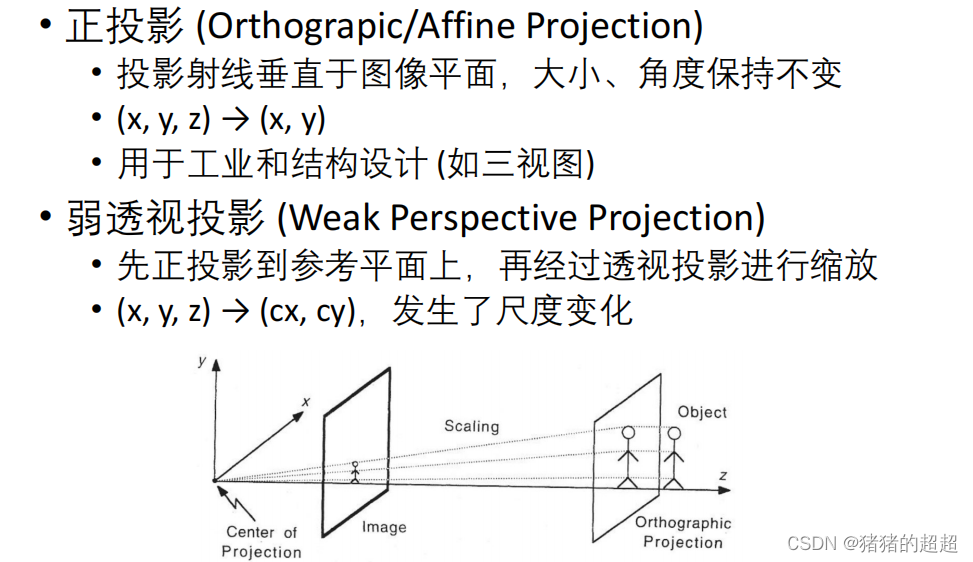
1.2 正投影与弱透视投影
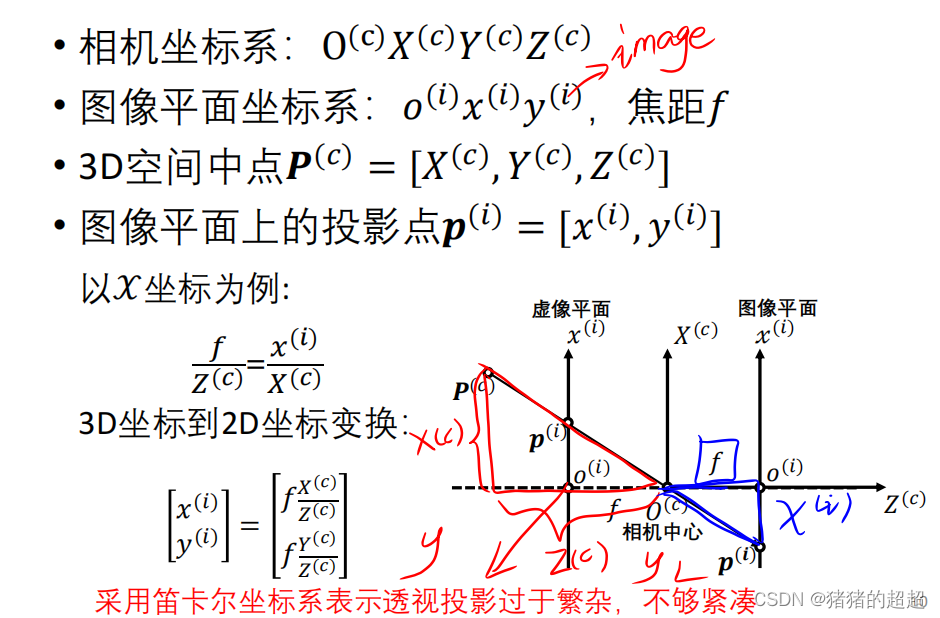
1.3 数学推导
二、齐次坐标系
• 齐次坐标系(Homogeneous Coordinates, H.C.) 是投影几何中常用坐标系
• 与笛卡尔坐标系相比,H.C.表达式更加简练、紧凑
• 仿射变换、投影变换都可以用一个矩阵表示
• 无穷远点可以用有限坐标表示
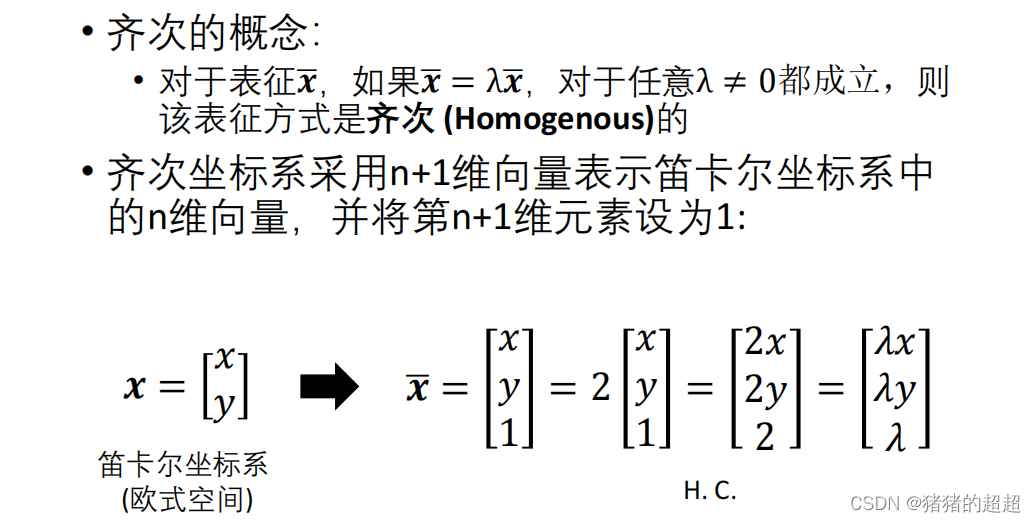
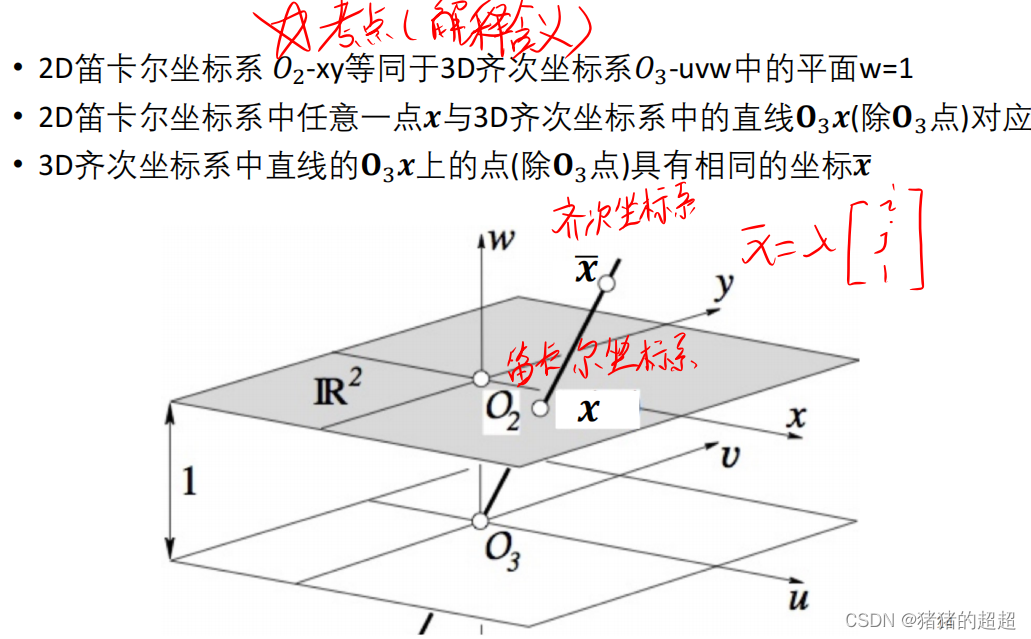
2.1 齐次坐标系的定义
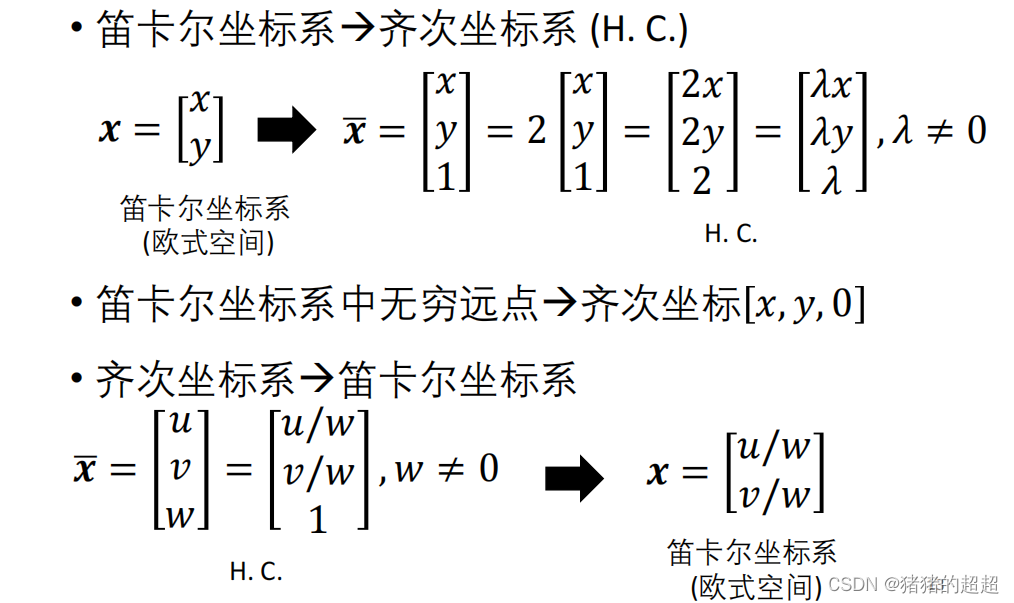
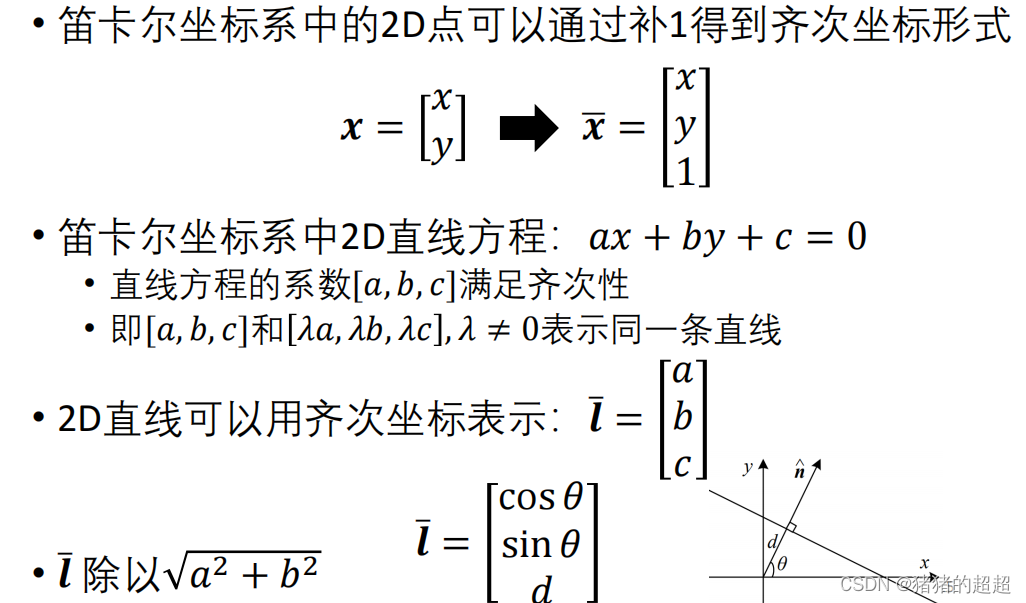
2.2 齐次坐标系与笛卡尔坐标系的转换
2.3 点、线变换
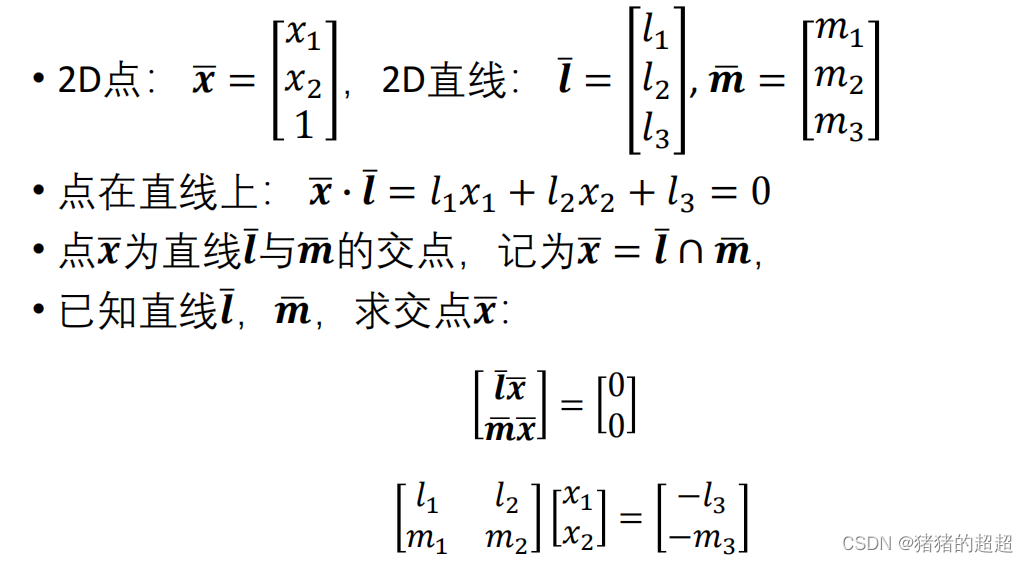
【点与直线的齐次坐标形式】
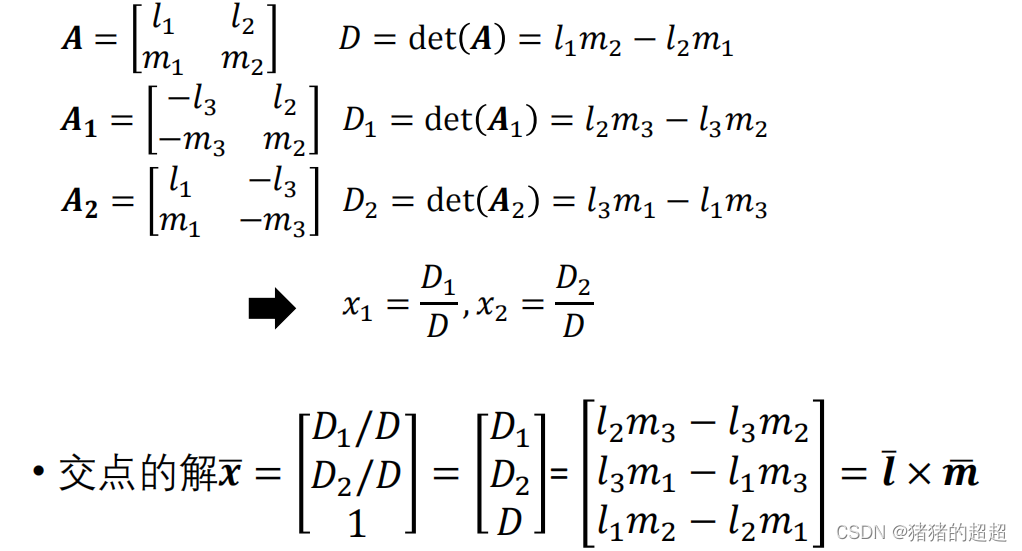
【求解两条直线的交点】
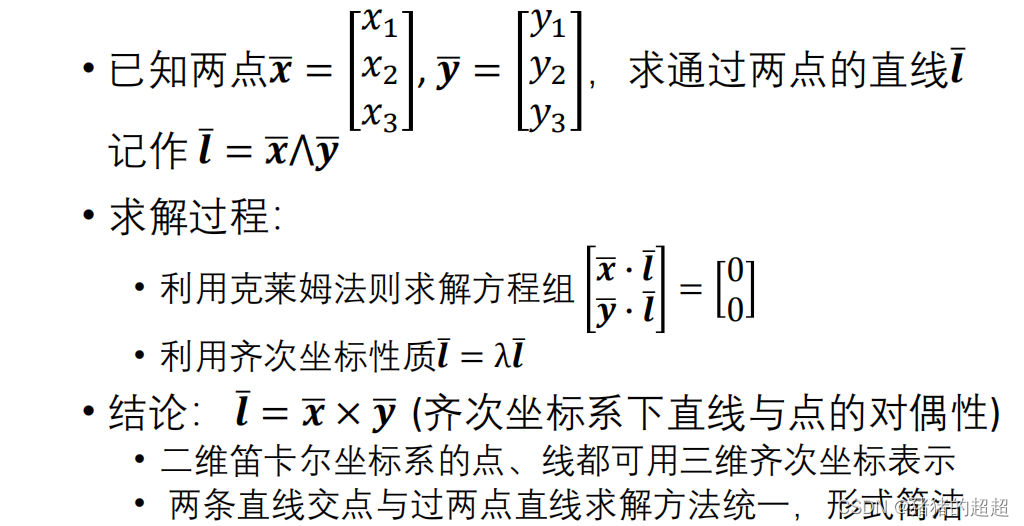
【求解通过两点的直线】
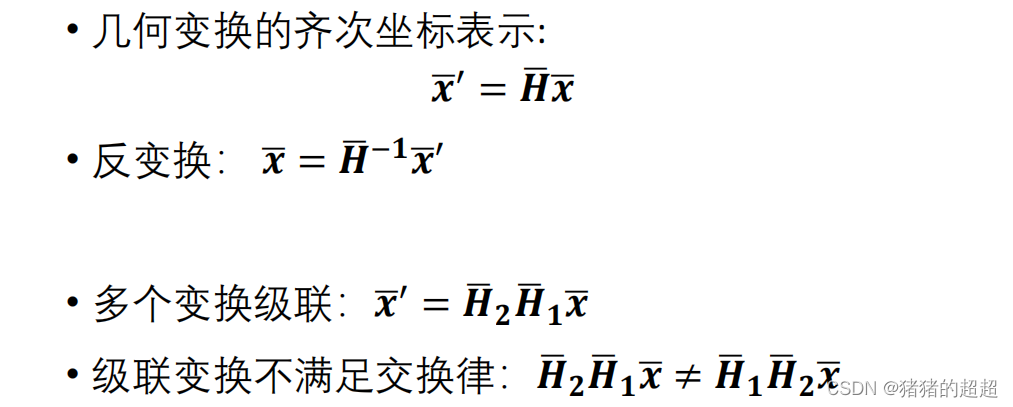
2.4 齐次坐标系下的几何变换
• 刚性几何变换本质是坐标变换
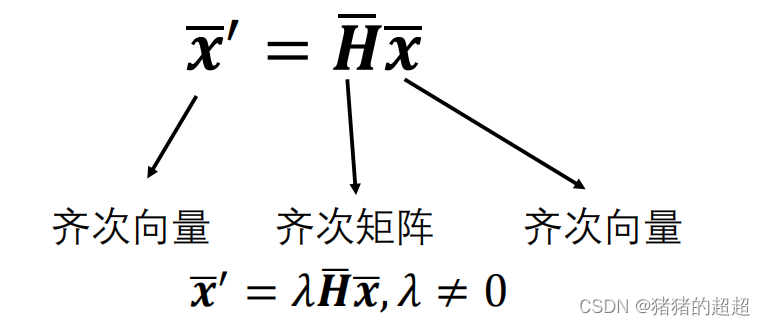
• 齐次坐标系下坐标变化可以表示为如下一般形式
【举例说明】
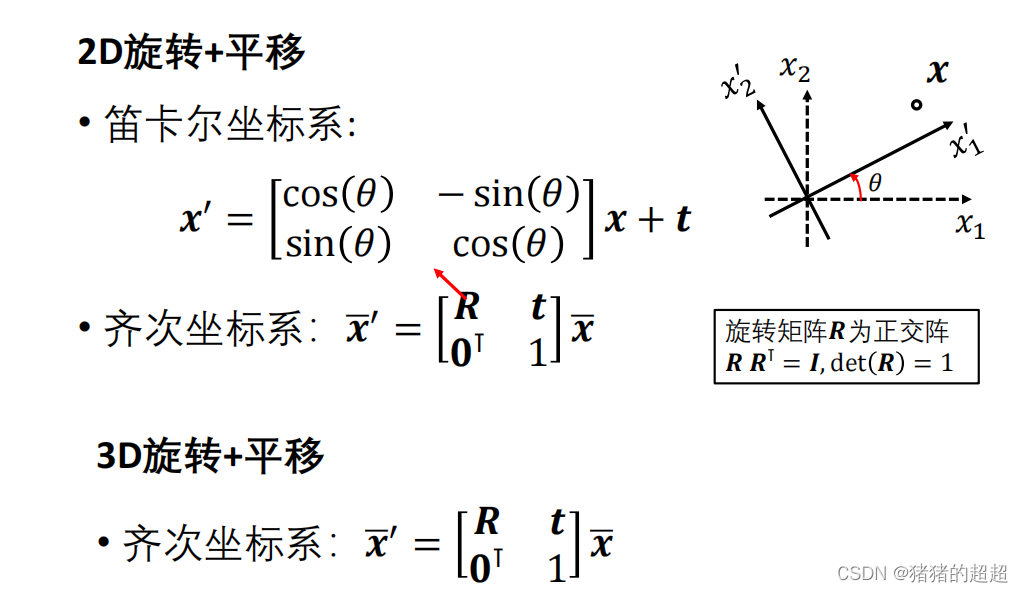
1、选择+平移
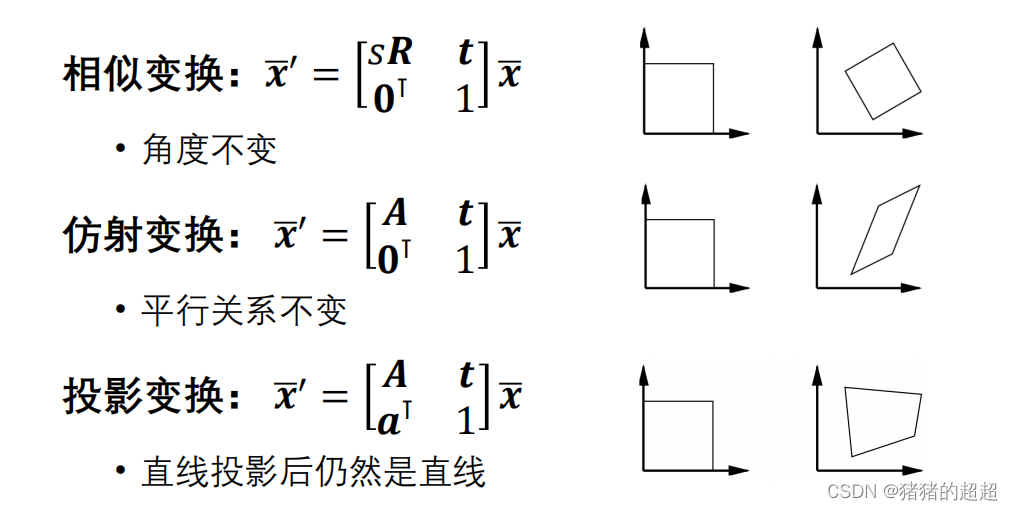
2、相似/仿射/投影变换
3、反变换与级联变换
三、相机参数
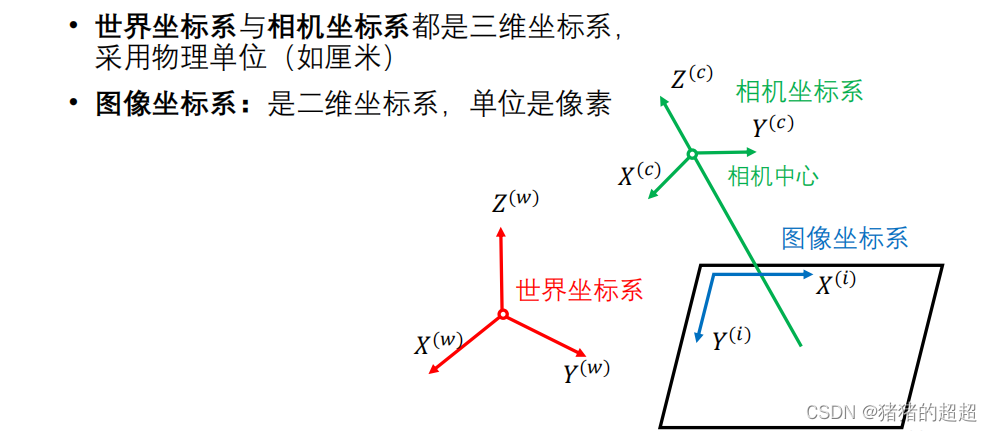
相机成像所涉及的坐标系有3个:世界坐标系、相机坐标系、图像坐标系。
• 世界坐标系:用于描述3D场景中物体的坐标,根据任务定义
• 相机坐标系:以相机中心为原点的坐标系
• 图像坐标系:图像平面上的坐标系,以图像左上角作为原点
• 成像过程实质是从世界坐标系到图像坐标系的映射,映射的过程采用相机外参(Extrinsic)和内参(Intrinsic)描述
• 成像过程: 世界坐标系 -> 相机坐标系 -> 图像坐标系 -> 相机中心
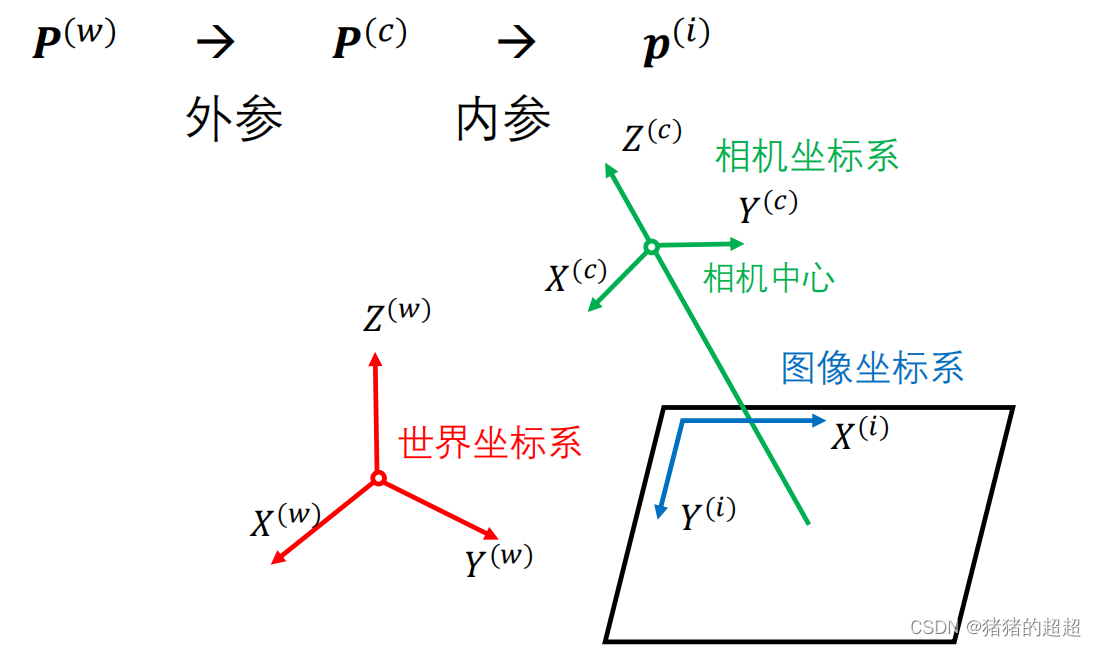
3.1 相机外参
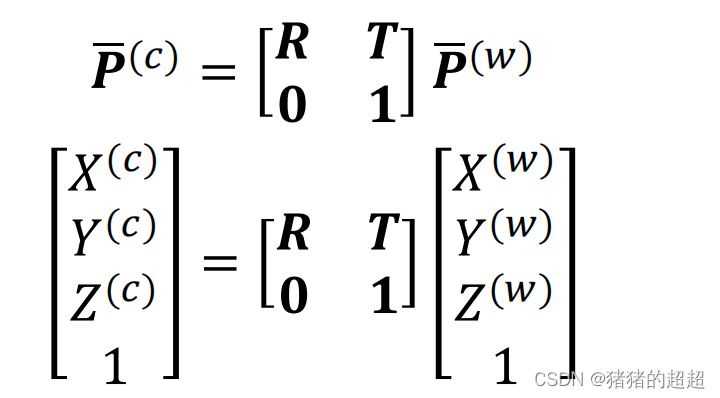
相机外参:从世界坐标系到相机坐标系
• 相机坐标系与世界坐标系之间存在旋转和平移变换,分别由旋转矩阵𝑹 ∈ ℝ3×3和平移向量𝑻 ∈ ℝ3×1表示
• 𝑹与𝑻共6个自由度,被称为相机的外参 (Extrinsic Parameters)、相机的姿态 (Pose)
• 世界坐标系到相机坐标系的坐标变换关系:
3.2 相机内参
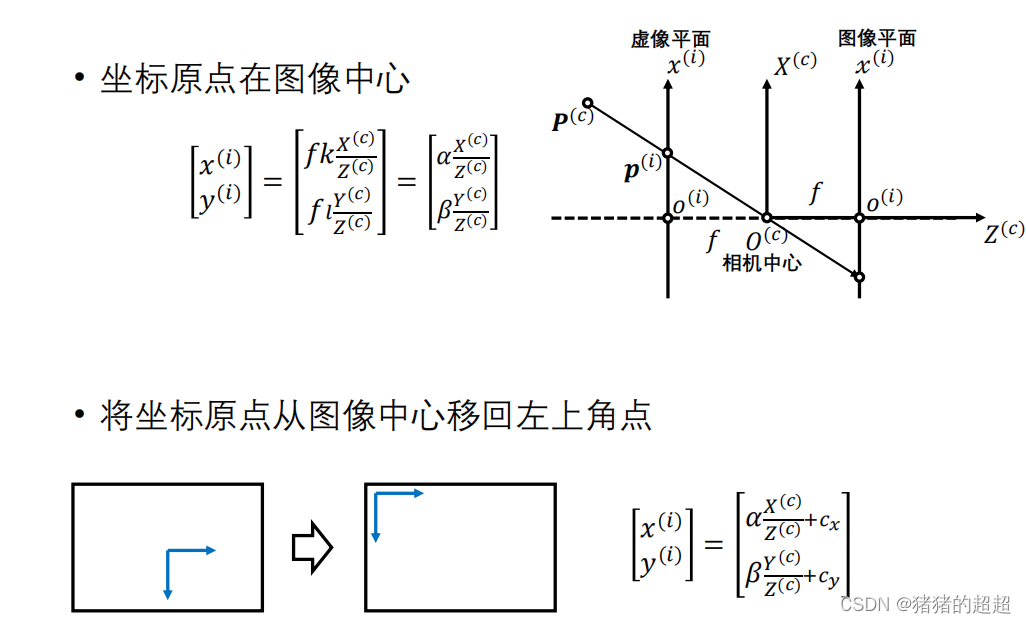
相机内参:从相机坐标系到图像坐标系
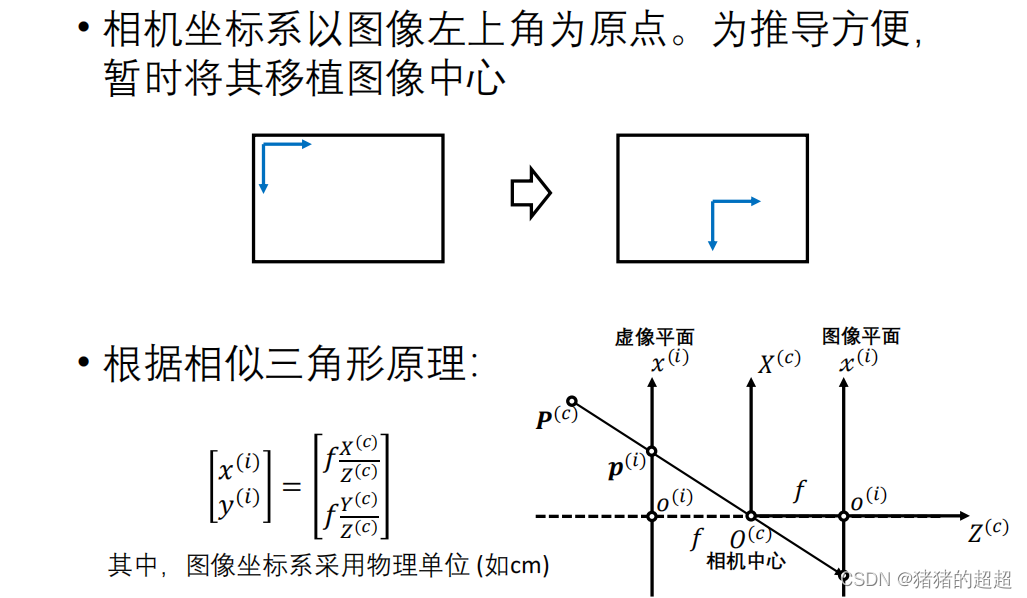
引入额外两个参数 𝑘 与 𝑙 (单位是 𝑝𝑖𝑥𝑒𝑙𝑠 / 𝑐𝑚 )
实现图像水平和竖直方向由物理单位到像素单位的转化:
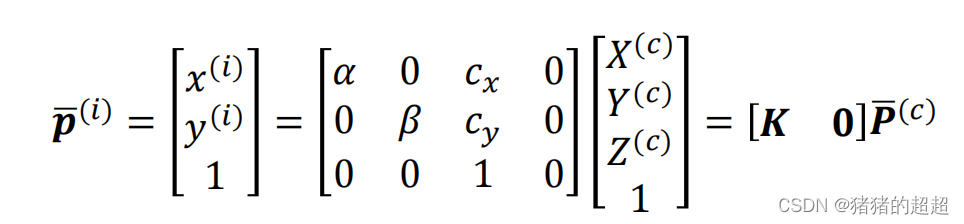
用齐次坐标系的表达形式如下:
3.3 世界坐标系 -> 图像坐标系

总结
通过本节的讲解,我们了解了透视投影的概念,学习了齐次坐标系以及其与笛卡尔坐标系的转换,并进一步学习了点线变换和齐次坐标系下的几何变换。在掌握这些基础知识后,我们进一步学习了相机的内外参,从世界坐标系到相机坐标系,再到图像坐标系,为我们后续学习相机标定打下坚实的基础。