自建数据集完成二分类任务(参考文章)
1 图片预处理
1 .1 统一图片格式
找到的图片需要首先做相同尺寸的裁剪,归一化,否则会因为图片大小不同报错
RuntimeError: stack expects each tensor to be equal size,
but got [3, 667, 406] at entry 0 and [3, 600, 400] at entry 1
pytorch的torchvision.transforms模块提供了许多用于图片变换/增强的函数。
1.1.1 把图片不等比例压缩为固定大小
transforms.Resize((600,600)),
1.1.2 裁剪保留核心区
因为主体要识别的图像一般在中心位置,所以使用CenterCrop,这里设置为(400, 400)
transforms.CenterCrop((400,400)),
1.1.3 处理成统一数据类型
这里统一成torch.float64方便神经网络计算,也可以统一成其他比如uint32等类型
transforms.ConvertImageDtype(torch.float64),
1.1.4 归一化进一步缩小图片范围
对于图片来说0~255的范围有点大,并不利于模型梯度计算,我们应该进行归一化。pytorch当中也提供了归一化的函数torchvision.transforms.Normalize(mean,std),
- 我们可以使用
[0.5,0.5,0.5]的mean,std来把数据归一化至[-1,1] - 也可以手动计算出所有的图片
mean,std来归一化至均值为0,标准差为1的正态分布, - 一些深度学习代码常常使用
mean=[0.485, 0.456, 0.406],std=[0.229, 0.224, 0.225]的归一化数据,这是在ImageNet的几百万张图片数据计算得出的结果 BN等方法也具有很出色的归一化表现,我们也会使用到
Juliuszh:详解深度学习中的Normalization,BN/LN/WN
Algernon:【基础算法】六问透彻理解BN(Batch Normalization)
我们这里使用简单的[0.5,0.5,0.5]归一化方法,更新cls_dataset,加入transform操作 ,作为图片裁剪的预处理。
transforms.Normalize([0.5,0.5,0.5],[0.5,0.5,0.5])
关于transforms的操作大体分为裁剪/翻转和旋转/图像变换/transform自身操作,具体见余霆嵩:PyTorch 学习笔记(三):transforms的二十二个方法,这里不进行详细展开。
1.2 数据增强
当数据集较小时,可以通过对已有图片做数据增强,利用之前提到的transforms中的函数 ,也可以混合使用来根据已有数据创造新数据
self.data_enhancement = transforms.Compose([transforms.RandomHorizontalFlip(p=1),transforms.RandomRotation(30)])
2 创建自制数据集
2.1 以Dataset类接口为模版
class cls_dataset(Dataset):def __init__(self) -> None:# initializationdef __getitem__(self, index):# return data,label in set def __len__(self):# return the length of the dataset
2.2 创建set
2.2.1定义两个空列表data_list和target_list
2.2.2遍历文件夹
2.2.3读取图片对象,对每一个图片对象预处理后,分别将图片对象和对应的标签加入data_list和target_list中
2.2.4将data_list和target_list加入h5df_ile中
import os
from tqdm import tqdm
import numpy as np
import torch
from torch.utils.data import Dataset, DataLoader
from torchvision import transforms
import h5py
from torchvision.io import read_imagetrain_pic_path = 'test-set'
test_pic_path = 'training-set'def create_h5_file(file_name):all_type = ['flower', 'bird']h5df_file = h5py.File(file_name, "w") #file_name指向比如"train.hdf5"这种文件路径,但这句话之前file_name指向路径为空#图片统一化处理transform = transforms.Compose([transforms.Resize((600, 600)),transforms.CenterCrop((400, 400)),transforms.ConvertImageDtype(torch.float64),transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])])#数据增强data_list = [] #建立一个保存图片张量的空列表target_list = [] #建立一个保存图片标签的空列表#遍历文件夹建立数据集'''文件夹组成| —— train| | —— flower| | | —— 图片1| | —— bird| | —— | —— 图片2| —— test| | —— flower| | —— bird'''dataset_kind = file_name.split('.')[0]#先判断缺失的文件是训练集还是测试集if dataset_kind == 'train':pic_file_name = train_pic_pathelse:pic_file_name = test_pic_path#再循环遍历文件夹for file_name_dir, _, files in tqdm(os.walk(pic_file_name)):target = file_name_dir.split('/')[-1]if target in all_type:for file in files:pic = read_image(os.path.join(file_name_dir, file)) #以张量形式读取图片对象pic = transform(pic) #预处理图片pic = np.array(pic).astype(np.float64)data_list.append(pic) #将pic对象添加到列表里target_list.append(target.encode()) #将target编码后添加到列表里h5df_file.create_dataset("image", data=data_list)h5df_file.create_dataset("target", data=target_list)h5df_file.close()class h5py_dataset(Dataset):def __init__(self, file_name) -> None:super().__init__()self.file_name = file_name #指向文件的路径名#如果file_name指向的h5文件不存在,就新建一个if not os.path.exists(file_name):create_h5_file(file_name)def __getitem__(self, index):with h5py.File(self.file_name, 'r') as f:if f['target'][index].decode() == 'bird': #如果在f文件的target列表中查找到index下标对应的标签是birdtarget = torch.tensor(0)else:target = torch.tensor(1)return f['image'][index], targetdef __len__(self):with h5py.File(self.file_name, 'r') as f:return len(f['target'])def h5py_loader():train_file = 'train.hdf5'test_file = 'test.hdf5'train_dataset = h5py_dataset(train_file)test_dataset = h5py_dataset(test_file)train_data_loader = DataLoader(train_dataset, batch_size=4)test_data_loader = DataLoader(test_dataset, batch_size=4)return train_data_loader, test_data_loader2.3 创建loader
实例化set对象后利用torch.utils.data.DataLoader
3 搭建网络
3.1 网络结构
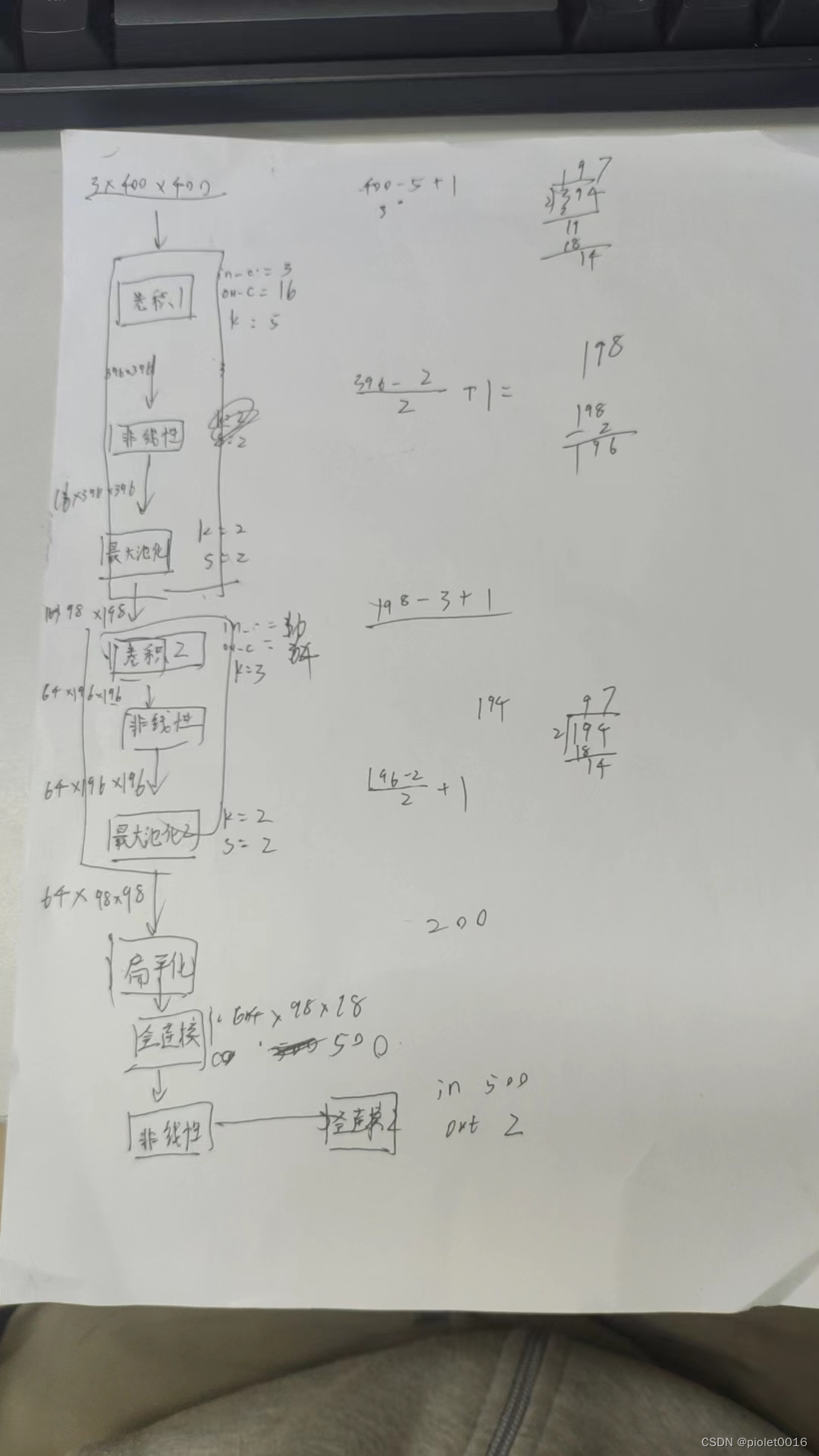
3.2 参数计算
卷积后,池化后尺寸计算公式:
(图像尺寸-卷积核尺寸 + 2*填充值)/步长+1
(图像尺寸-池化窗尺寸 + 2*填充值)/步长+1
参考文章
3.3 不成文规定
池化参数一般就是(2, 2)
中间的channel数量都是自己设定的,二的次方就行
kernelsize一般3或者5之类的
4 训练
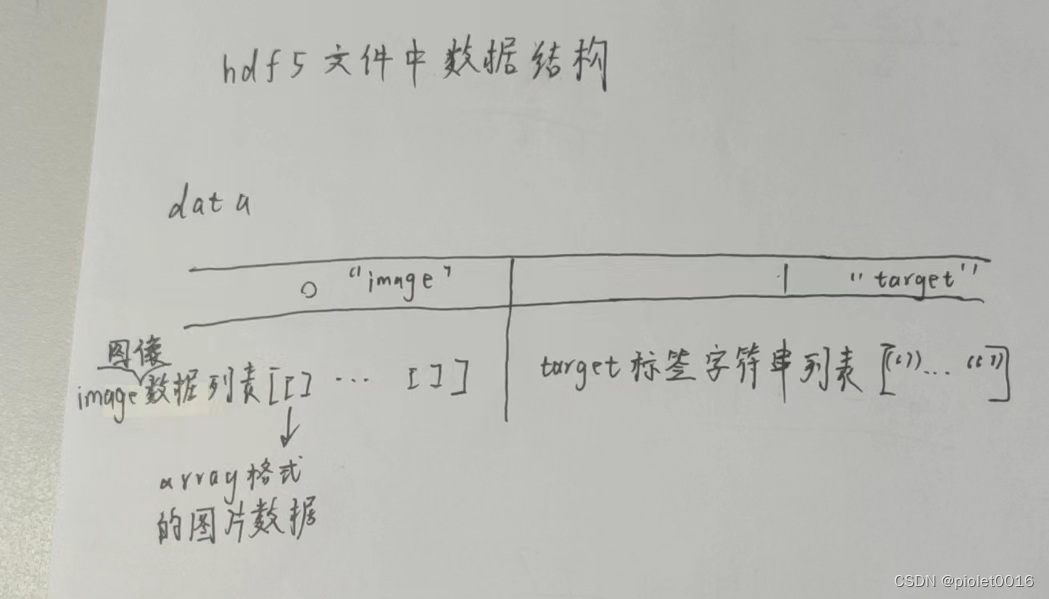
加深对前面数据集组成理解
for _, data in enumerate(train_loader):if isinstance(data, list):image = data[0].type(torch.FloatTensor).to(device)target = data[1].to(device)elif isinstance(data, dict):image = data['image'].type(torch.FloatTensor).to(device)target = data['target'].to(device)else:print(type(data))raise TypeErrorfor 循环中data的组成来源于构建set时,
h5df_file.create_dataset("image", data=data_list)h5df_file.create_dataset("target", data=target_list)
写入了h5df文件中两个dataset,但在文件中是以嵌套列表形式保存,其中data[0]等价于引用image这个dataset,data[1]等价于引用target这个集合
5 测试
6 保存模型
改进
投影概率放到网络里面