1.研究内容
本篇主要对海康威视的监控相机的SDK回调进行研究,并于opencv结合,保存图像,以供后续其他处理,开发语言为C++
2.步骤及方法
2.1 海康SDK介绍
海康SDK下载地址
根据自身编译环境,下载对应的SDK,需要注意的是,不要和工业相机SDK相混淆,工业相机好像是MVS是什么玩意儿,现在暂时没研究
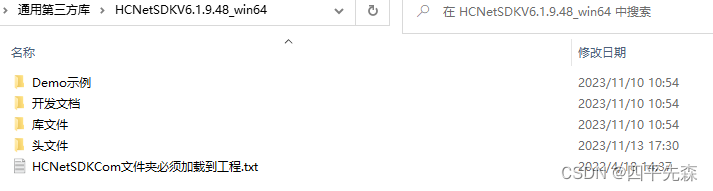
SDK包的结构如下,包括需要的头文件和库目录,其中windows下还提供了Demo示例,开发文档是我们时常需要用到的,结构如下:
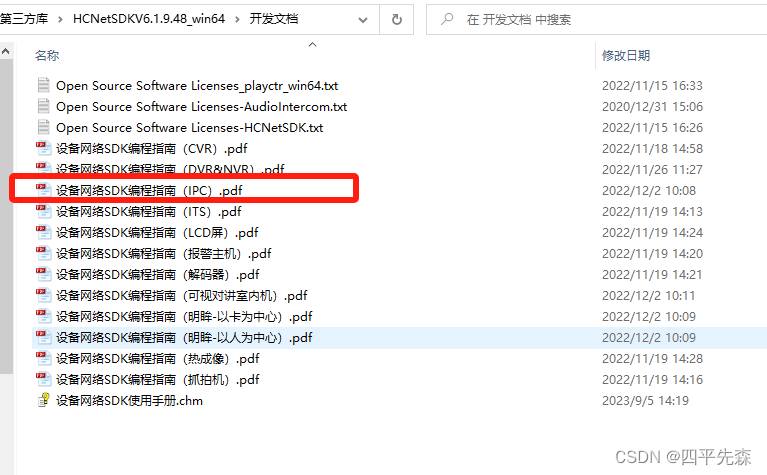
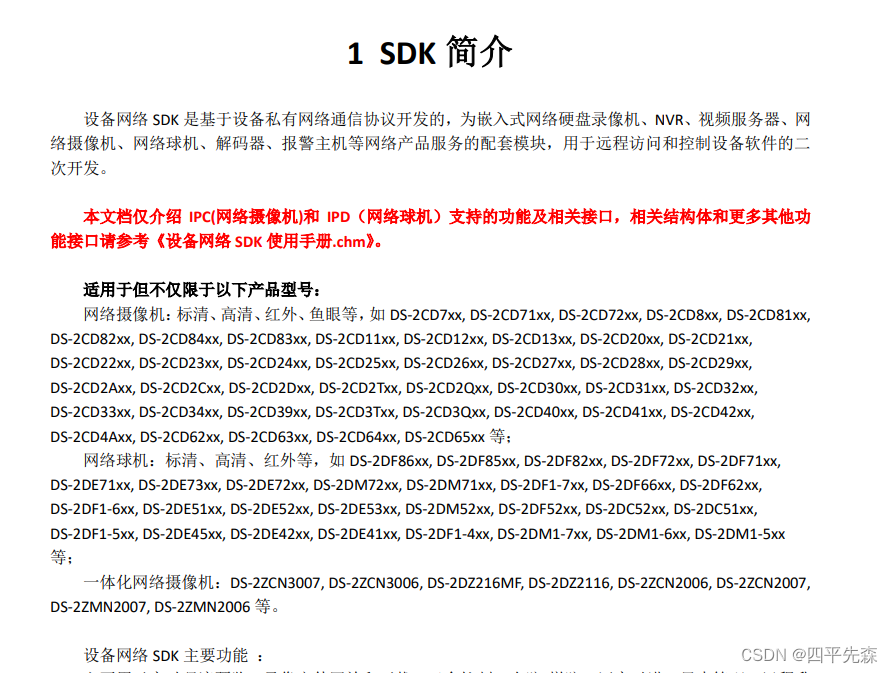
其中SDK编程指南是需要注意的一个地方,通常需要根据自己的相机型号选择对应的文件,有些相机型号可能不支持,比如我使用的DS-2CD7********,这款相机,就只支持IPC的,查看文档是否支持相机,可以打开文档,在SDK简介中查看:
SDK文件确定后可以开始后续的开发了
2.2 环境搭建
打开visual studio 2022,配置sdk环境,包括前面提到的库文件和头文件,其中用到了opencv,配置opencv的相关头文件和库文件:
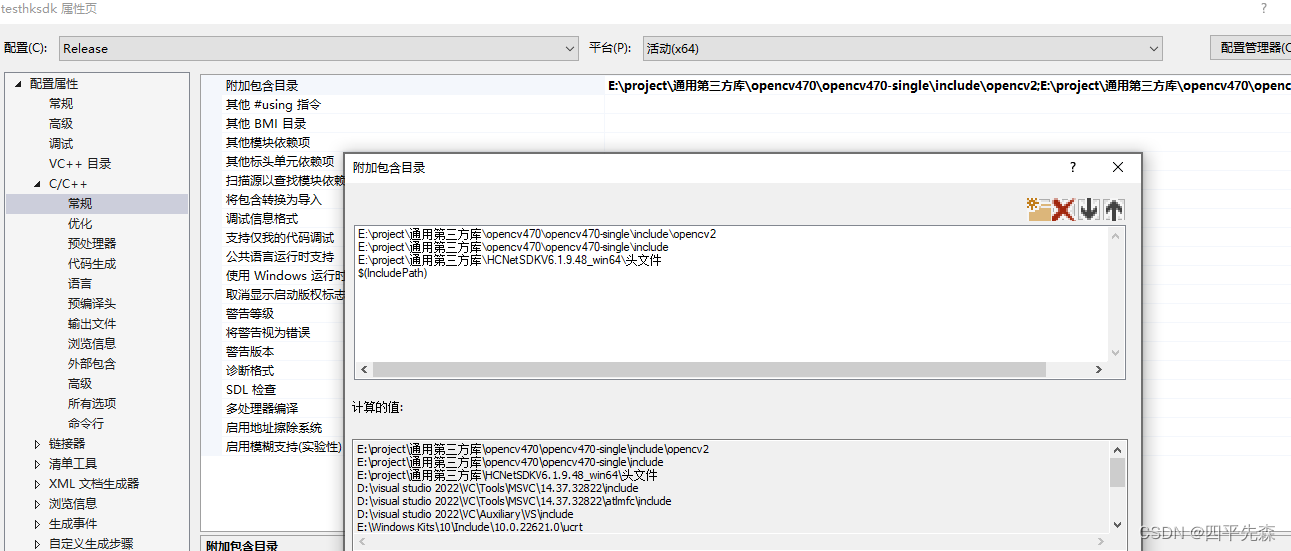
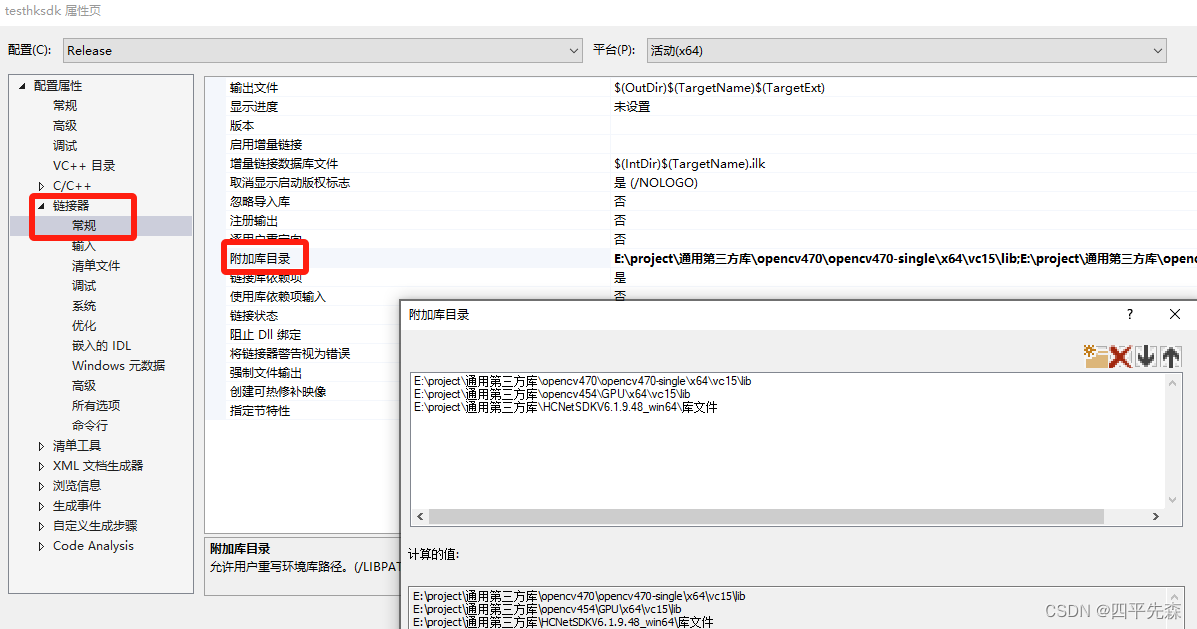
配置方式不多说,也可以在VC++目录中添加
添加完成后,编写头文件,蒋需用到的库包含进来,包括opencv的和海康sdk的:
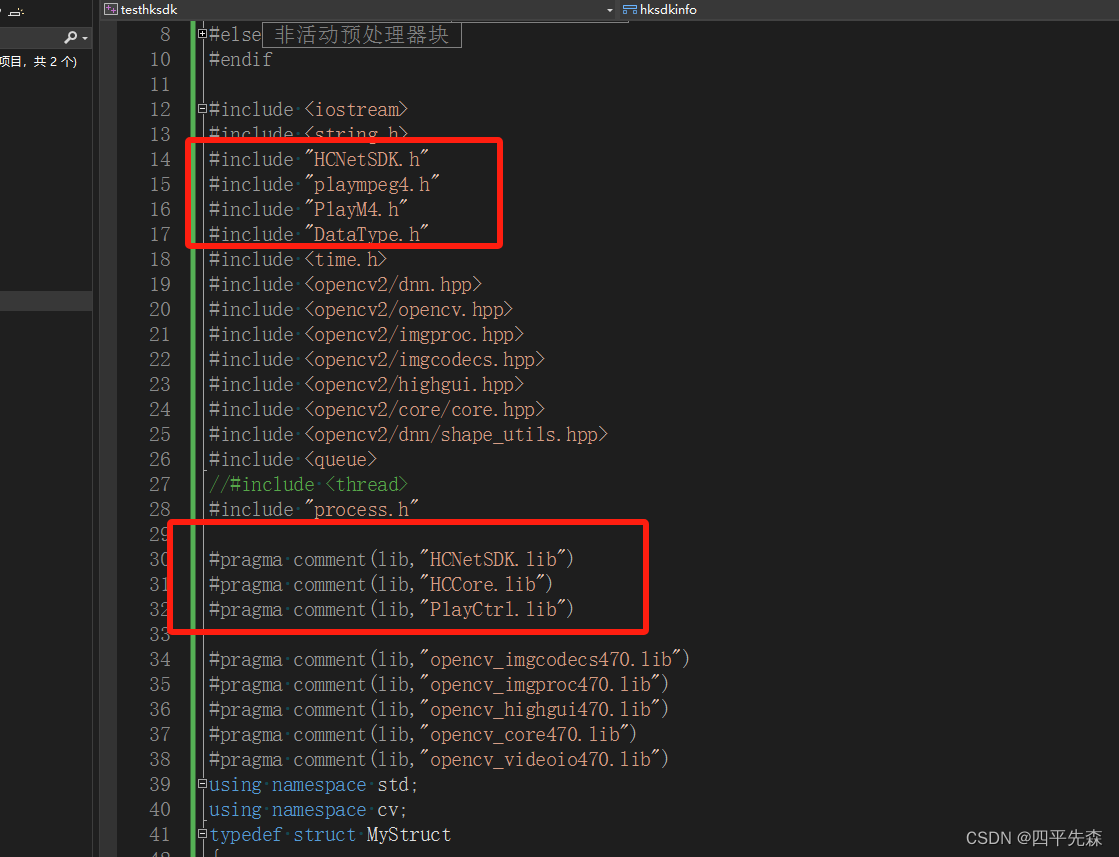
其中有一个PlayM4.h头文件,sdk里面是没有的,需要在示例文件中拷贝过来,opencv如果是编译成一个opencv_world的,直接配置上去就行了
2.3 相机配置
海康相机配置比较容易,初始的IP地址是192.168.1.64,可以根据实际使用情况,修改相机的IP,登录的用户名和密码,sdk调用的时候需要用到这3个信息。
2.4 SDK调用
SDK取流在文档的第4章《函数调用示例》中,直接复制,粘贴,修改好自己相机的IP,用户名和密码就可以正常调用起来了,主要分为以下几个部分:
(1)初始化
初始化,包括设备注册,设置连接时间和重连时间,设置异常回调函数等,其中最重要的是设置登录相机设备的IP地址,用户名和密码。
(2)调用相机
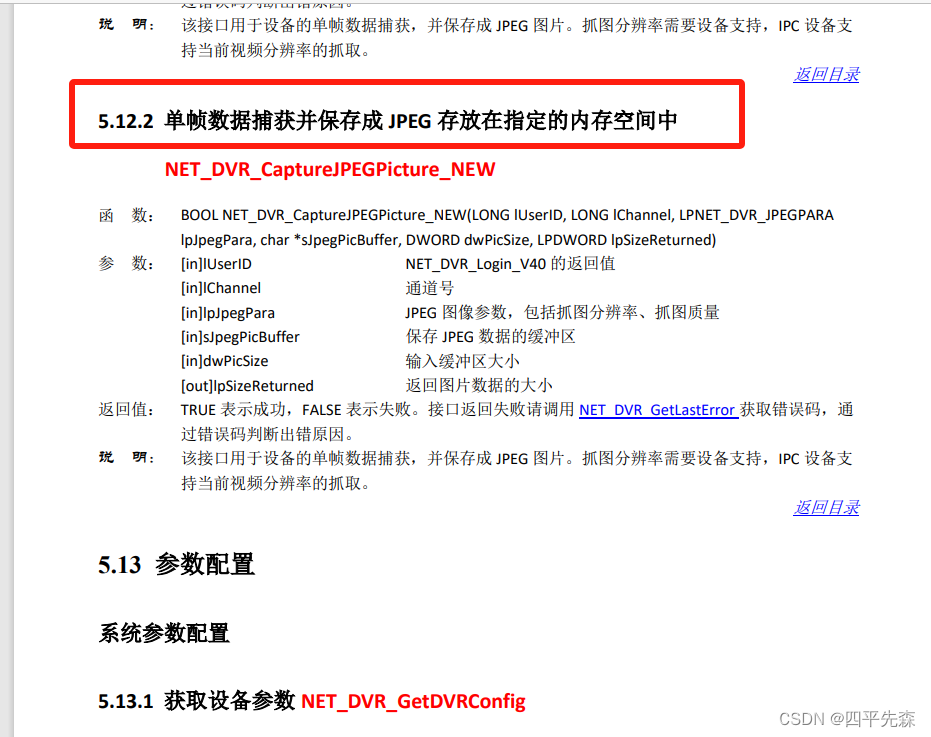
调用相机有多种方式,可以直接使用rtsp取流,也可以直接使用海康sdk提供的回调取流函数,这一部分需要参考sdk开发文档,不只是代码示例,还有sdk提供的其他函数,可参考5《函数说明》,例如,我需要拿到图像后和opencv结合,那么需要拿到图像的数据,就需要用到以下接口了:
3 图像保存
本篇主要解决的问题是,sdk拿到的图像通过opencv保存下来并且可以做其他操作,sdk中提供的参考示例用了一个Sleep函数,不是和符合我的要求,所以做了一些修改后面会提供整个代码工程,主要的改动如下:
参考的sdk:

修改的部分
//使用海康的SDK抓取图像HKSDK_LIB_API int __stdcall playCapture(void* user,int count, Mat &save_image_l,Mat &save_image_r)
{//外部多线程使用LPMyStruct stru = (LPMyStruct)user;//启动预览并设置回调数据流NET_DVR_PREVIEWINFO struPlayInfo = { 0 };struPlayInfo.hPlayWnd = NULL; //需要SDK解码时句柄设为有效值,仅取流不解码时可设为空struPlayInfo.lChannel = stru->channel; //预览通道号struPlayInfo.dwStreamType = 0; //0-主码流,1-子码流,2-码流3,3-码流4,以此类推struPlayInfo.dwLinkMode = 0; //0- TCP方式,1- UDP方式,2- 多播方式,3- RTP方式,4-RTP/RTSP,5-RSTP/HTTPstruPlayInfo.bBlocked = 1; //0- 非阻塞取流,1- 阻塞取流LPNET_DVR_JPEGPARA JpegPara = new NET_DVR_JPEGPARA;JpegPara->wPicQuality = 0;JpegPara->wPicSize = 70;int w = 2560;int h = 1440;char* Jpeg = new char[w * h];DWORD len = w * h;LPDWORD Ret = 0;if (!NET_DVR_SetCapturePictureMode(BMP_MODE)){cout << "Set Capture Picture Mode error!" << endl;cout << "The error code is " << NET_DVR_GetLastError() << endl;}vector<char>data(w * h);bool capture = NET_DVR_CaptureJPEGPicture_NEW(stru->lUserId, struPlayInfo.lChannel, JpegPara, Jpeg, len, Ret);if (!capture){printf("Error: NET_DVR_CaptureJPEGPicture_NEW = %d", NET_DVR_GetLastError());return -1;}for (int i = 0; i < w * h; i++)data[i] = Jpeg[i];if(stru->channel==1){save_image_l = imdecode(Mat(data), 1);}if (stru->channel == 2) {save_image_r = imdecode(Mat(data), 1);}return 0;
}此时save_image_r 表示的就是一个Mat了,主要修改包括:
(1)LPNET_DVR_JPEGPARA
从这一部分开始,和sdk提供的有所区别,主要用NET_DVR_CaptureJPEGPicture_NEW替换了NET_DVR_RealPlay_V40函数
其中LPNET_DVR_JPEGPARA类提供了一些配置,包括图像大小,图像质量等。
4 完整C++代码工程
完整的代码工程点击头像获取资源,可以直接部署使用,我这里相机有两个通道图,所以拿到了两个图。
5 参考
[1] 海康威视SDK文档 https://open.hikvision.com/download/5cda567cf47ae80dd41a54b3?type=10
[2]https://blog.csdn.net/u013832707/article/details/103405278
[3]https://blog.csdn.net/xiaojunjun200211/article/details/122237091