在ROS 中,坐标变换是一个重要的概念,因为它允许系统中的不同节点和模块以统一的方式描述物体的位置和方向。
动态坐标变换指的是当机器人或其环境中物体的位姿(位置和姿态)发生变化时,能够实时更新这些信息的过程。
在ROS中,动态坐标变换通常涉及到机器人的位姿估计和运动控制。
位姿估计:ROS中的位姿估计通常使用传感器数据(如激光雷达、摄像头等)来估计机器人在环境中的位置和方向。常用的位姿估计算法有卡尔曼滤波器(Kalman Filter)、粒子滤波器(Particle Filter)等。这些算法可以实时地更新机器人的位姿信息,从而实现动态坐标变换。
运动控制:ROS中的运动控制通常使用机器人的运动学和动力学模型来实现。运动控制包括路径规划、速度控制、力控制等。在运动控制过程中,需要根据机器人的位姿信息进行动态坐标变换,以实现平滑的运动轨迹。
要实现ROS中的动态坐标变换,需要使用tf2库,
基本步骤如下:
1、安装依赖:确保工作空间已经包含了 tf2、tf2_ros、tf2_geometry_msgs 和相关的消息包(如 geometry_msgs)。
2、创建节点:编写一个C++节点来订阅物体的位姿信息。例如,在 turtlesim 包中,可以订阅 /turtle1/pose 主题来获取乌龟的位置和角度信息。
3、初始化发布器:创建一个 tf2_ros::TransformBroadcaster 对象来广播新的坐标变换。
4、处理位姿信息:当收到新的位姿信息时,将其转换为所需的坐标系格式。这通常涉及到将接收的坐标系下的位姿数据转换到其他坐标系下。
5、 构建并广播坐标变换:使用 geometry_msgs::TransformStamped 消息类型来封装坐标变换信息。包括源坐标系、目标坐标系、时间戳以及变换矩阵或四元数。然后使用 TransformBroadcaster 发布这个消息。
6、运行节点:启动节点,并确保它正确地订阅了位姿主题并发布了坐标变换。
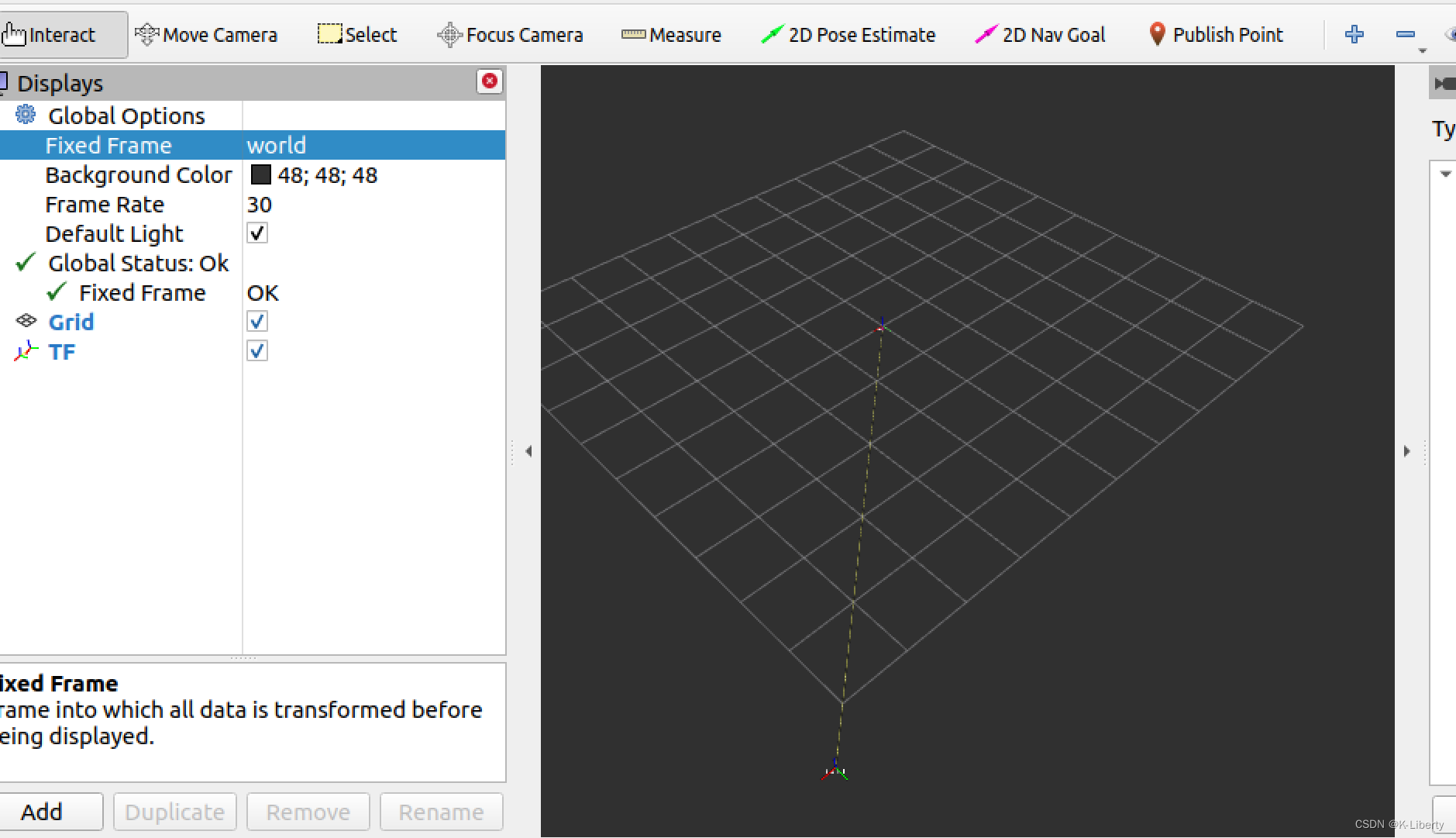
7、在rviz中可视化坐标变换:在rviz中设置正确的Fixed Frame(固定帧),这样就可以看到坐标变换的效果。
示例:启动 turtlesim_node,该节点中窗体有一个世界坐标系(左下角为坐标系原点),乌龟是另一个坐标系,键盘控制乌龟运动,将两个坐标系的相对位置动态发布。
实现分析:
乌龟本身不但可以看作坐标系,也是世界坐标系中的一个坐标点
订阅 turtle1/pose,可以获取乌龟在世界坐标系的 x坐标、y坐标、偏移量以及线速度和角速度
将 pose 信息转换成 坐标系相对信息并发布
实现流程: