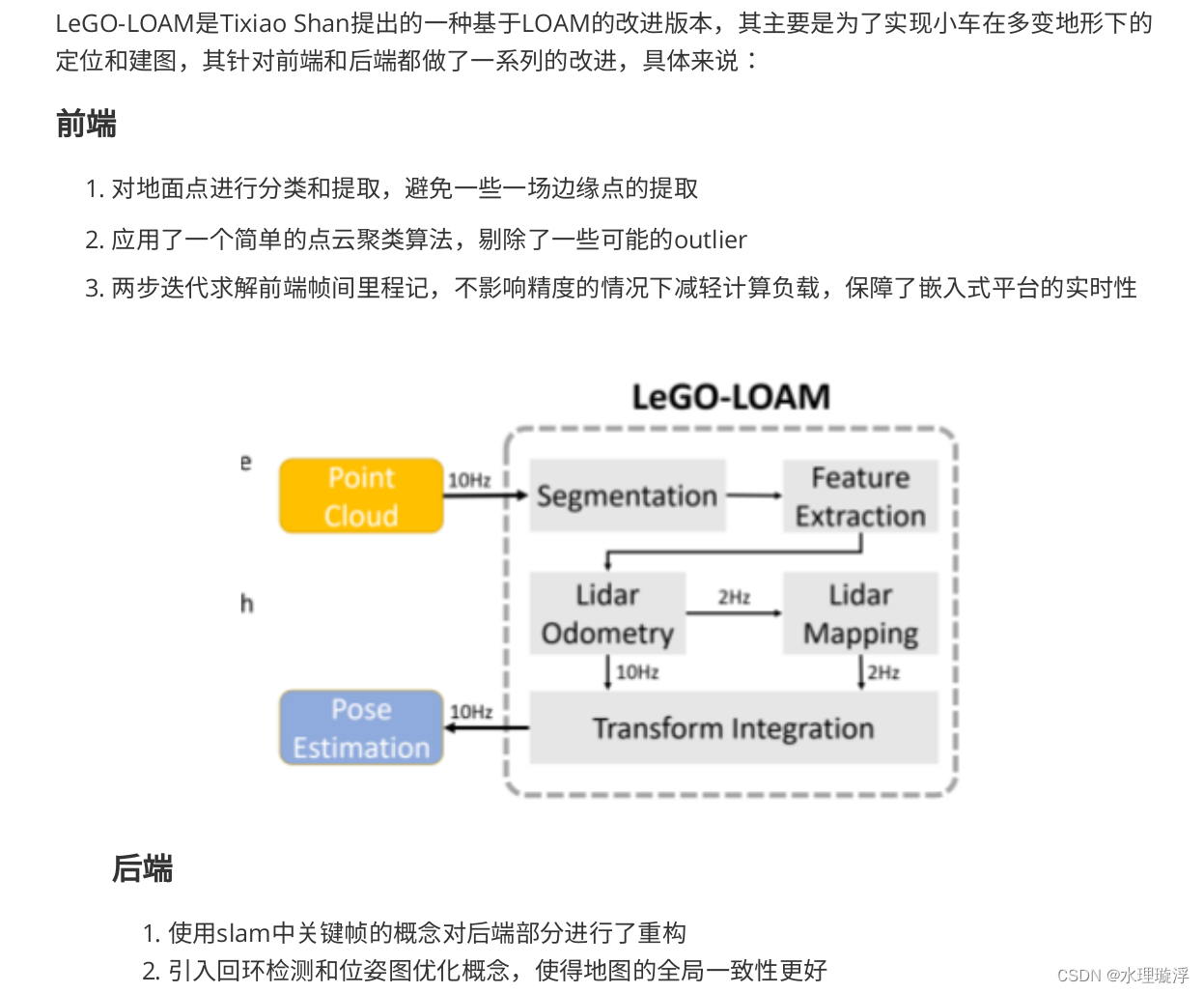
一、源码地址:
GitHub - RobustFieldAutonomyLab/LeGO-LOAM: LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable TerrainLeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain - GitHub - RobustFieldAutonomyLab/LeGO-LOAM: LeGO-LOAM: Lightweight and Ground-Optimized Lidar Odometry and Mapping on Variable Terrain![]() https://github.com/RobustFieldAutonomyLab/LeGO-LOAM
https://github.com/RobustFieldAutonomyLab/LeGO-LOAM
二、依赖安装
本机ubuntu18.04 melodic
gtsam4.0.2
gtsam-4.0.2的安装_gtsam4.0.2-CSDN博客文章浏览阅读113次。【代码】gtsam-4.0.2的安装。_gtsam4.0.2https://blog.csdn.net/weixin_44760904/article/details/134137745?spm=1001.2014.3001.5501
三、开始安装
如果已经创建过catkin_ws,直接cd过去就行
cd ~/catkin_ws/src
git clone https://github.com/RobustFieldAutonomyLab/LeGO-LOAM.git
cd ..
catkin_make -j1
source ~/catkin_ws/devel/setup.bash四、运行:
终端1:
roslaunch lego_loam run.launch终端2:
rosbag play YOUR_DATASET_FOLDER/nsh_indoor_outdoor.bag --clock --topic /velodyne_points /imu/data--clock使用BAG的时钟
包下载地址:https://drive.google.com/file/d/1s05tBQOLNEDDurlg48KiUWxCp-YqYyGH/view
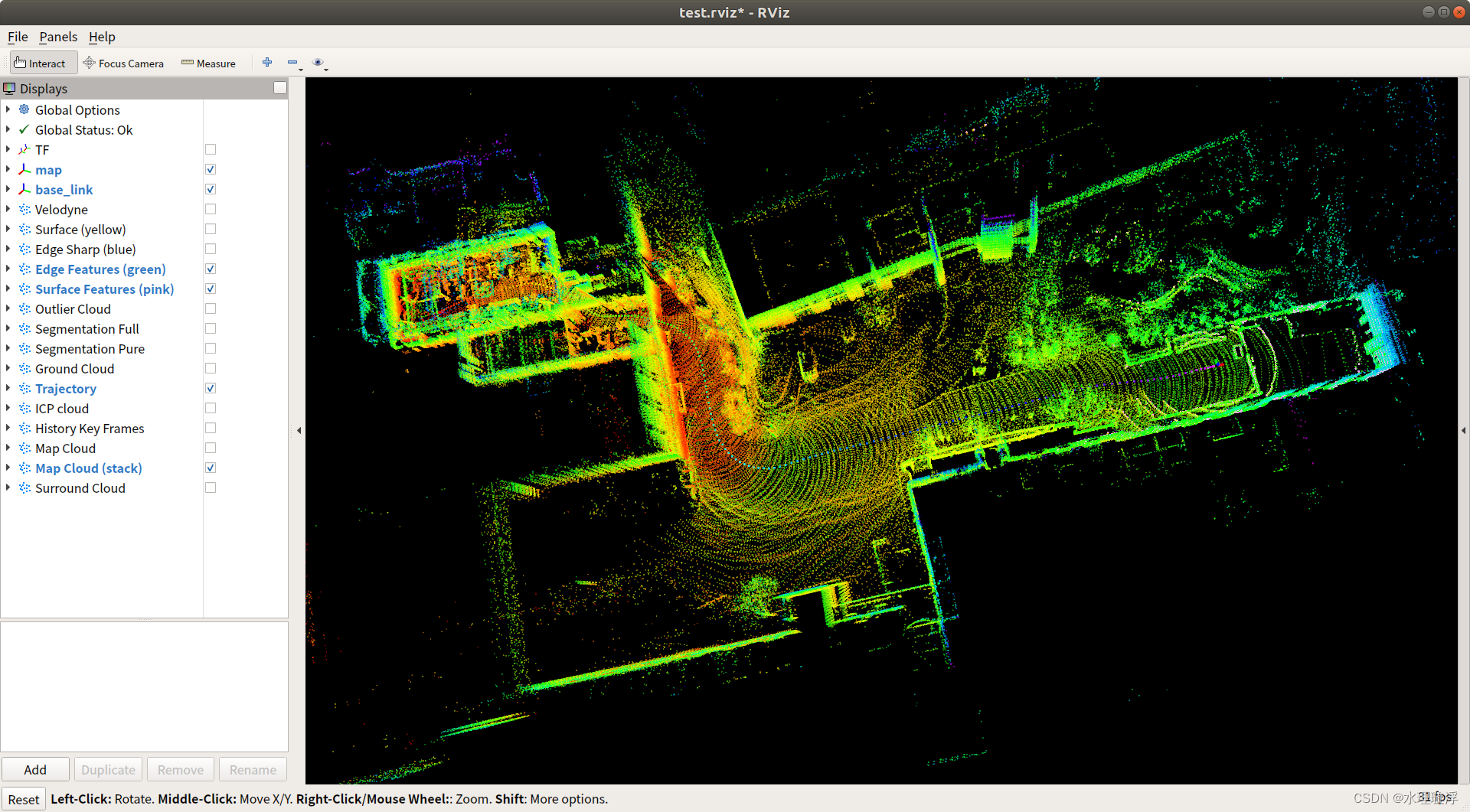
五、效果



![【算法每日一练]-动态规划(保姆级教程 篇14) #三倍经验 #散步 #异或和 #抽奖概率](https://img-blog.csdnimg.cn/direct/8b6f3b7be0454f68be86fa35faf0f6d4.jpeg)