命令行执行下行,即可得树莓派管脚编码表。
$ gpio readall
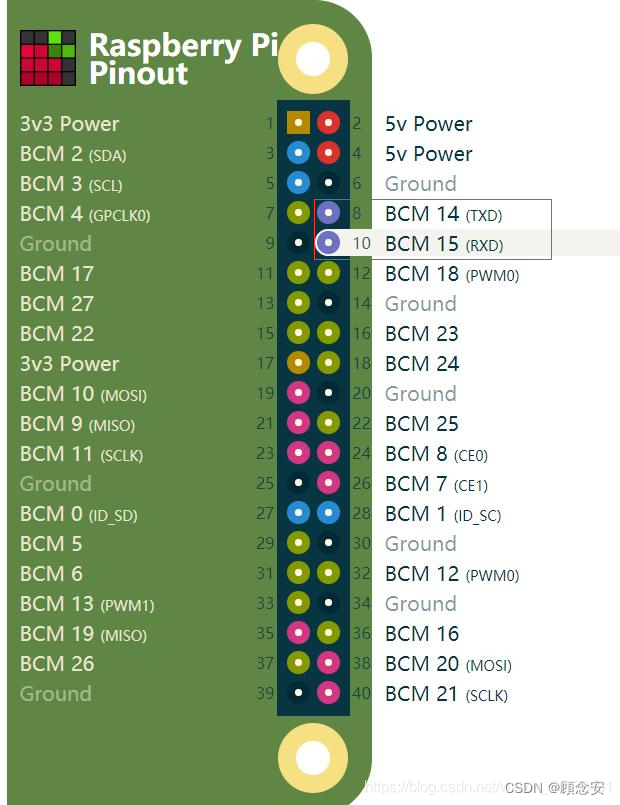
也可看下图:

- BOARD 编号参考 Raspberry Pi 主板上 P1 接线柱的针脚编号。使用该方式的优点是无需考虑主板的修订版本,无需因为版本不同而重新连接线路和更改代码。
- BCM编号侧重CPU寄存器,根据BCM2835的GPIO寄存器编号。
- wiringPi编号侧重实现逻辑,把扩展GPIO端口从0开始编号,这种编号方便编程。
GPIO控制
shell直接控制GPIO
以GPIO18为例
- 使GPIO18从内核空间暴露到用户空间,改变Linux标准输入输出的默认设备,重定向用户自定义的设备。此行命令的含义是:向export文件中写入18。执行该操作后,/sys/class/gpio下会增加一个gpio18文件夹。
pi@raspberrypi:~ $ sudo echo 18 > /sys/class/gpio/export
- 可以查看一下GPIO18引脚(Linux中以文件形式存储,引脚视为设备)。第一行指移动到指定目录;第二行是查看该目录下文件(文件夹也是文件)。
pi@raspberrypi:~ $ cd /sys/class/gpio/gpio18
pi@raspberrypi:/sys/class/gpio/gpio18 $ ls
- 设置GPIO18为输出模式。
pi@raspberrypi:/sys/class/gpio/gpio18 $ sudo echo out > direction
- 向value文件中写入1,GPIO18输出高电平
pi@raspberrypi:/sys/class/gpio/gpio18 $ sudo echo 1 > value
- 返回上级目录(如果需要)
$ cd ..
- 返回HOME(如果需要)
$ cd ~
- 注销GPIO18(如果需要)
pi@raspberrypi:~ $ sudo echo 18 > /sys/class/gpio/unexport
shell脚本控制GPIO
- 新建一个eg.sh文件
$ sudo nano eg.sh
写入下列内容:
echo $1 > /sys/class/gpio/exportecho out > /sys/class/gpio/gpio$1/directionecho 1 > /sys/class/gpio/gpio$1/valuesleep 5 #延时5秒echo 0 > /sys/class/gpio/gpio$1/valueecho $1 > /sys/class/gpio/unexportshell脚本可传入参数,$x代表第x个参数。
- 为eg.sh添加可执行权限
$ sudo chmod +x eg.sh
- 运行。18为传入参数
$ sudo ./eg.sh 18
Python通过RPI.GPIO命令控制GPIO
注意:该模块不适合应用到追求实时性或计数周期的应用中。这是由于无法预测 Ptyhon 何时繁忙,以及资源回收的时间。而且它是运行在基于 Linux 核心的系统中,也不合适用于实时应用——原因在于其它进程可能获得更高的 CPU 优先级。如果一定要追求实时操作,可以考虑加一块专用于操作的板子。
import RPi.GPIO as GPIO #目前通过RPi.GPIO操作引脚应该只能用BOARD和BCM两种编编号GPIO.setmode(GPIO.BCM) #设置BCM编号
#GPIO.setmode(GPIO.BOARD)
禁用警告。可能你的 Raspberry Pi 的 GPIO 上同时有多个脚本/循环,如果 RPi.GPIO 检测到某个针脚被设置为其它用途而非默认的状态(默认为输入),尝试配置某脚本时会被警告。
GPIO.setwarnings(False) #禁用警告消息 配置引脚(channel)
GPIO.setup(channel, GPIO.IN) #输入
GPIO.setup(channel, GPIO.OUT) #输出
GPIO.setup(channel, GPIO.OUT, initial=GPIO.HIGH) #还可以指定输出通道初始值输入输出
GPIO.input(channel) #将返回 0 / GPIO.LOW / False 或者 1 / GPIO.HIGH / True
GPIO.output(channel, state) # state可以是 0 / GPIO.LOW / False 或者 1 / GPIO.HIGH / True清理。任何程序结束后,养成清理用过资源的好习惯。恢复所有用过的引脚状态为输入,可避免由于短路意外损坏树莓派。该操作仅会清理脚本使用过的引脚通道。
GPIO.cleanup()运行python脚本(未开启root的话,需要sudo)
$ sudo chmod +x eg.py #添加可执行权限
$ sudo python eg.py #运行PWM
- 创建一个PWM实例
pwm = GPIO.PWM(channel, frequency) #单位Hz,其值应大于0.0。- 启用PWM
pwm.start(dc) # dc指定PWM信号的初始占空比,取值范围为0.0 ≤ dc ≤ 100.0- 更改PWM频率
pwm.ChangeFrequency(freq)- 更改PWM占空比
pwm.ChangeDutyCycle(dc)
dc:指定PWM的新占空比,取值范围为0.0 ≤ dc ≤ 100.0。
- 停止PWM
pwm.stop()