今天继续分享单片机编程实例第100-200例。
今天的实例会比前面100复杂一些,我大概看了下,很多都具备实际产品的参考价值。
今天继续分享单片机编程实例第100-200例。
今天的实例会比前面100复杂一些,我大概看了下,很多都具备实际产品的参考价值。
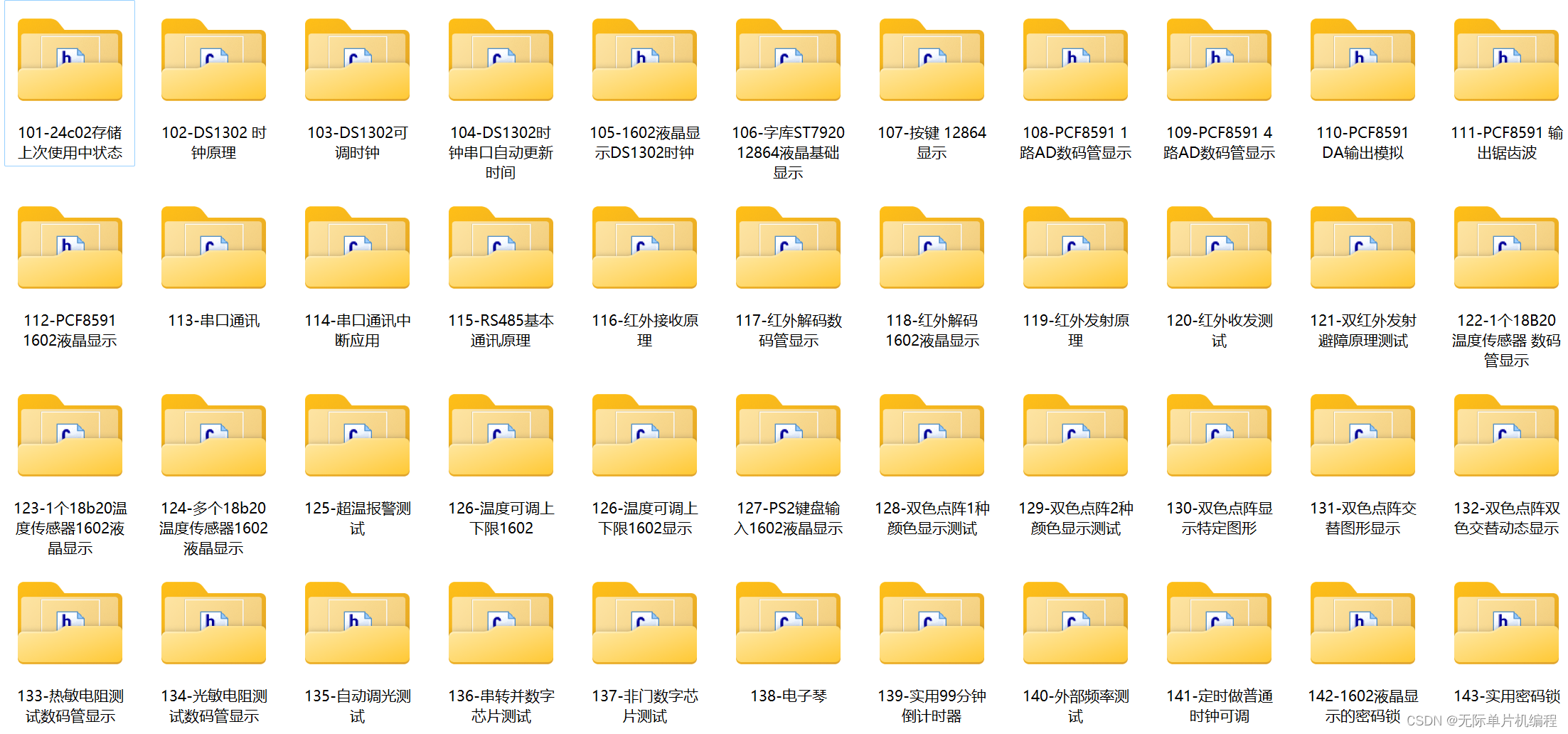
篇幅有限,老规矩,随机分享几例:
1.遥控器红外解码数码管显示
#include<reg52.h> //包含头文件,一般情况不需要改动,头文件包含特殊功能寄存器的定义sbit IR=P3^2; //红外接口标志#define DataPort P0 //定义数据端口 程序中遇到DataPort 则用P0 替换
sbit LATCH1=P2^2;//定义锁存使能端口 段锁存
sbit LATCH2=P2^3;// 位锁存
/*------------------------------------------------全局变量声明
------------------------------------------------*/unsigned char code dofly_DuanMa[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};// 显示段码值0~9
unsigned char irtime;//红外用全局变量bit irpro_ok,irok;
unsigned char IRcord[4];
unsigned char irdata[33];/*------------------------------------------------函数声明
------------------------------------------------*/void Ir_work(void);
void Ircordpro(void);/*------------------------------------------------定时器0中断处理
------------------------------------------------*/void tim0_isr (void) interrupt 1 using 1
{irtime++; //用于计数2个下降沿之间的时间
}/*------------------------------------------------外部中断0中断处理
------------------------------------------------*/
void EX0_ISR (void) interrupt 0 //外部中断0服务函数
{static unsigned char i; //接收红外信号处理static bit startflag; //是否开始处理标志位if(startflag)
{if(irtime<63&&irtime>=33)//引导码 TC9012的头码,9ms+4.5msi=0;irdata[i]=irtime;//存储每个电平的持续时间,用于以后判断是0还是1irtime=0;i++;if(i==33){irok=1;i=0;}}else{irtime=0;startflag=1;}}/*------------------------------------------------定时器0初始化
------------------------------------------------*/
void TIM0init(void)//定时器0初始化
{TMOD=0x02;//定时器0工作方式2,TH0是重装值,TL0是初值TH0=0x00; //重载值TL0=0x00; //初始化值ET0=1; //开中断TR0=1;
}
/*------------------------------------------------外部中断0初始化
------------------------------------------------*/
void EX0init(void)
{IT0 = 1; //指定外部中断0下降沿触发,INT0 (P3.2)EX0 = 1; //使能外部中断EA = 1; //开总中断
}
/*------------------------------------------------键值处理
------------------------------------------------*/void Ir_work(void)//红外键值散转程序
{switch(IRcord[2])//判断第三个数码值{case 0:DataPort=dofly_DuanMa[1];break;//1 显示相应的按键值case 1:DataPort=dofly_DuanMa[2];break;//2case 2:DataPort=dofly_DuanMa[3];break;//3case 3:DataPort=dofly_DuanMa[4];break;//4case 4:DataPort=dofly_DuanMa[5];break;//5case 5:DataPort=dofly_DuanMa[6];break;//6case 6:DataPort=dofly_DuanMa[7];break;//7case 7:DataPort=dofly_DuanMa[8];break;//8case 8:DataPort=dofly_DuanMa[9];break;//9default:break;}irpro_ok=0;//处理完成标志}
/*------------------------------------------------红外码值处理
------------------------------------------------*/
void Ircordpro(void)//红外码值处理函数
{ unsigned char i, j, k;unsigned char cord,value;k=1;for(i=0;i<4;i++) //处理4个字节{for(j=1;j<=8;j++) //处理1个字节8位{cord=irdata[k];if(cord>7)//大于某值为1,这个和晶振有绝对关系,这里使用12M计算,此值可以有一定误差value|=0x80;if(j<8){value>>=1;}k++;}IRcord[i]=value;value=0; } irpro_ok=1;//处理完毕标志位置1
}/*------------------------------------------------主函数
------------------------------------------------*/
void main(void)
{EX0init(); //初始化外部中断TIM0init();//初始化定时器DataPort=0xfe; //取位码 第一位数码管选通,即二进制1111 1110LATCH2=1; //位锁存LATCH2=0;while(1)//主循环{if(irok) //如果接收好了进行红外处理{ Ircordpro();irok=0;}if(irpro_ok) //如果处理好后进行工作处理,如按对应的按键后显示对应的数字等{Ir_work();}}
}这段代码是一个8051单片机红外通信和数码管显示的程序,程序的主要功能是接收红外信号,解码,然后根据解码结果在数码管上显示相应的按键值。
通过外部中断0接收红外信号,定时器0计算信号的时间间隔,然后通过中断服务程序和主循环中的函数调用,完成红外信号的接收、解码和显示。
程序中定义了两个中断,一个是定时器中断,用于计算时间间隔;另一个是外部中断,用于接收红外信号并触发信号的采样。
2.步进电机控制
通过P1.3,P1.4,P1.5,P1.6四个IO口,来控制步进电机,包括电机的转动方向和速度控制。
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned intsbit KEY1 = P3^2; //步进电机顺时针方向转
sbit KEY2 = P3^3; //步进电机逆时针方向转
sbit KEY3 = P3^4; //步进电机调速uchar Step = 0;
bit FB_flag = 0;unsigned char code F_Rotation[8]={0x08,0x18,0x10,0x30,0x20,0x60,0x40,0x48}; //顺时针转表格
unsigned char code B_Rotation[8]={0x48,0x40,0x60,0x20,0x30,0x10,0x18,0x08}; //逆时针转表格/********************************************************************
* 名称 : Delay_1ms()
* 功能 : 延时子程序,延时时间为 1ms * x
* 输入 : x (延时一毫秒的个数)
* 输出 : 无
***********************************************************************/
void Delay(uint i)
{uchar x,j;for(j=0;j<i;j++)for(x=0;x<=148;x++);
}void KEY(void)
{if(KEY1 == 0) //按P3.2,实现步进电机的顺时针转动{Delay(15);if(KEY1 == 0){FB_flag = 0;}Delay(200);}if(KEY2 == 0) //按P3.3,实现步进电机的逆时针转动{Delay(15);if(KEY2 == 0){FB_flag = 1;}Delay(200);}if(KEY3 == 0) //按P3.4,实现步进电机的调速{Delay(15);if(KEY3 == 0){Step++;if(Step == 3){Step = 0;}}Delay(200);}
}void main()
{uchar i; //uint k = 0;while(1){ KEY(); //按键处理函数for(i=0;i<8;i++) //因为有8路的控制时序{//k++;//if(k == 4096) while(1);if(FB_flag == 0){P1 = F_Rotation[i]; //顺时针转动}else{P1 = B_Rotation[i]; //逆时针转动}Delay(1+Step); //改变这个参数可以调整电机转速}}
}
通过按键输入控制步进电机的转动方向和速度,通过P1端口输出相应的控制信号,驱动步进电机按照预定的步进序列转动。程序中使用了简单的去抖动逻辑来提高按键输入的稳定性。
整理不易,做个有素质的看官,三连安排!
最近很多粉丝问我单片机怎么学,我根据自己从业十年经验,累积耗时一个月,精心整理一份「单
片机最佳学习路径+单片机入门到高级教程+工具包」,全部无偿分享给铁粉!!!
除此以外,再含泪分享我压箱底的22个热门开源项目,包含源码+原理图+PCB+说明文档,让你迅速进阶成高手!

教程资料包和详细的学习路径可以看我下面这篇文章的开头。
《单片机入门到高级开挂学习路径(附教程+工具)》
《单片机入门到高级开挂学习路径(附教程+工具)》
《单片机入门到高级开挂学习路径(附教程+工具)》