引言: 建图,将图放进内存的方法
常用的建图方式:邻接矩阵,邻接链表,链式前向星
一、邻接矩阵
通过一个二维数组即可将图建立,邻接矩阵,考虑节点集合 ,用一个二维数组定义邻接矩阵
,满足以下

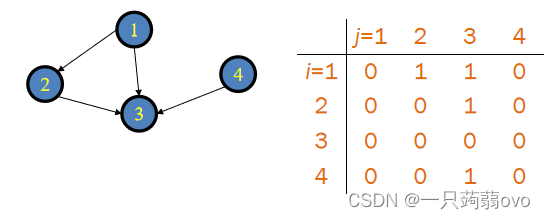
对于一个简单的有向图(或无向图),邻接矩阵如下:
无向图:若 u 与 v 之间存在一条边,则 A[u][v]=A[v][u]=1 (两个方向)
有向图:若有一条 u 指向 v 的边,则 A[u][v]=1;若有一条 v 指向 u 的边,则 A[v][u]=1(单向)
邻接矩阵的空间消耗为,无向图的邻接矩阵为对称矩阵。在某些情况下,只存储邻接矩阵的对角线及以上的部分,这样,图占用的存储空间可以减少一半。
二、邻接链表(vector建表)
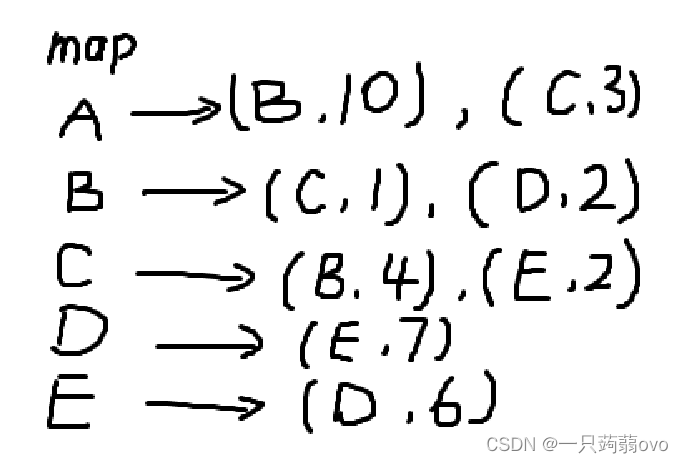
为一个包含 V 条链表的数组,每个节点有一个链表,对于每个节点u∈V,邻接链表Adj[u]包含所有与节点u之间有边相连的节点v。
如果G是一个有向图,则对于边(u,v)而言,节点 v 将出现在链表 Adj [ u ]里,所有邻接链表的长度之和等于 E;如果G是一个无向图,对于边(u,v),节点v将出现在链表 Adj [ u ] 里,节点 u 将出现在链表 Adj [ v ]里,所有邻接链表的长度之和为 2*E。
对一个有向图通过vector建图:

建图过程:
用结构体 node 存储两个数据(终点编号,边权值),建立 node 型的 vector 动态数组。建图也只需要将 结构体 直接插入 vector动态数组 末端即可。
typedef struct Node{int v; //终点编号int w; //起点到终点的边权
}Node;
vector<Node> map[201]; //用 vector 建立(不是严格意义上的链表)
void get_map(int m)
{for(int i=1;i<=m;i++){int u,v,w;scanf("%d%d%d",&u,&v,&w);Node tmp;tmp.v=v;tmp.w=w;map[u].push_back(tmp); //将 终点节点v 和 边权w 加入 节点u 的链表末尾tmp.v=u;tmp.w=w; //如果为无向图,反向边map[v].push_back(tmp); // 将 将终点节点u 和边权w 加入 节点v 的链表末尾}
}邻接链表表示法的储存空间均为 O(V+E)
vector 数组建图的应用(使用):
最小生成树prim算法(完整代码):
#include<stdio.h>
#include<iostream>
#include<vector>
#include<queue>
#include<string.h>
#include<stdlib.h>
using namespace std;
struct node{int w;int v;friend bool operator<(node x,node y){ return x.w>y.w;} // 优先队列比较 按照w从小到大排??
};
priority_queue<node>q; // 建立数据类型为node结构体的优先队列
int n,m,dis[1001],vis[1001];
vector<node>map[1001]; // 以node结构体的 vector数组
int sum=0;
void prim(int s)
{memset(dis,0x3f,sizeof(dis)); // 初始化 memset(vis,0,sizeof(vis));dis[s]=0;q.push((node){0,s});while(!q.empty()){int u=q.top().v;q.pop();if(vis[u]) continue;vis[u]=1;sum+=dis[u];for(int i=0;i<map[u].size();i++) // vector建图的使用 {int v=map[u][i].v;int w=map[u][i].w;if(dis[v]>w){dis[v]=w;q.push((node){w,v});}}}
}
int main()
{scanf("%d%d",&n,&m);for(int i=1;i<=m;i++){int u,v,w;scanf("%d%d%d",&u,&v,&w);node tmp; // vector 建图 tmp.v=v;tmp.w=w;map[u].push_back(tmp);tmp.v=u; map[v].push_back(tmp); // 反向边 }prim(1);for(int i=1;i<=n;i++) {if(!vis[i]) {printf("orz");return 0;}}printf("%d",sum);return 0; }三、链式前向星
链式前向星所用结构体和相关变量,建图函数
struct node{int to,next,w;
}edge[2001];
int head[1001];
int cnt=0;
void addedge(int u,int v,int w)
{edge[++cnt].to=v;edge[cnt].next=head[u];edge[cnt].w=w;head[u]=cnt;
}初始化函数
//初始化函数
void init()
{memset(head,-1,sizeof(head)); //将head数组的值全置为-1.cnt=0;//初始化边的编号
}对于一个有向图,用链式前向星建图:
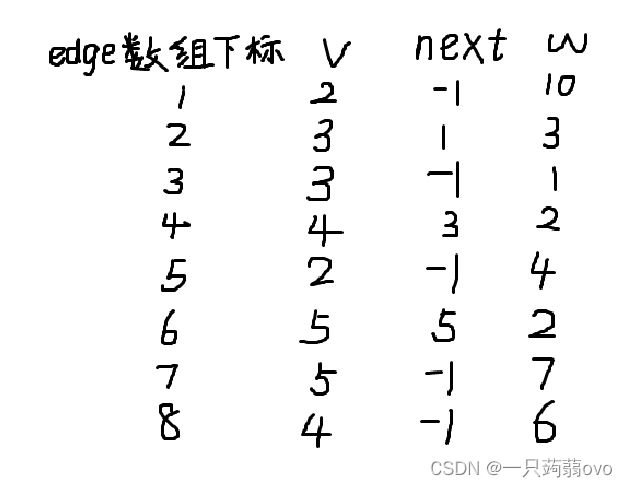

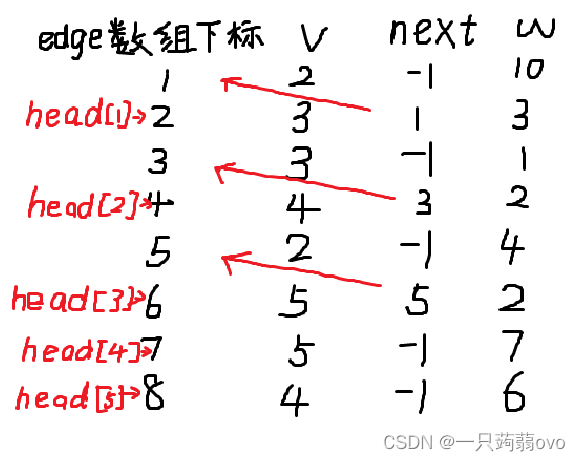
关于结构体中 next 数组含义: 某一条边的起点连接的上一个编号比它小的边。由于初始化,当某条边的next值为 -1 时,此条边为最后一条边。
运用链式前向星遍历图的过程:
首先根据节点 u 找到以 u 为起始点的边的编号,然后根据 next 找到下一条以 u 为起始点的边的编号,以此类推。
以链式前向星的方法建图的最小生成树prim算法: (主要代码)
void addedge(int u,int v,int w)
{edge[++cnt].v=v;edge[cnt].next=head[u];edge[cnt].w=w;head[u]=cnt;
}
void prim(int s)
{memset(dis,0x3f,sizeof(dis)); // 初始化 memset(vis,0,sizeof(vis));dis[s]=0;q.push((node1){0,s});while(!q.empty()){int u=q.top().v;q.pop();if(vis[u]) continue;vis[u]=1;sum+=dis[u];for(int i=head[u];i!=-1;i=edge[i].next){int v=edge[i].v;int w=edge[i].w;if(dis[v]>w){dis[v]=w;q.push((node1){w,v});}}}
}四、三种方法的优缺点比较::
1.邻接矩阵:
邻接矩阵通过一个二维数组直接表示两点之间的权值,但是由于二维数组,容易出现空间空间的浪费,并且数据量大时会出现爆栈。
2. 邻接链表(vector):
通过STL,步骤简单,vector采用可变数组的方式,动态变化时会耗费额外时间复制数组。
3.链式前向星:
操作简单,但不容易理解。