总结了一下,学习内容主要有:
1.ubuntu的基础命令
pwd: 获得当前路径
cd: 进入或者退出一个目录
ls:列举该文件夹下的所有文件名称
mv 移动一个文件到另一个目录中
cp 拷贝一个文件到另一个目录中
rm -r 删除文件
gedit
sudo 给予管理员权限
sudo apt-get install
sudo pkg -i xx.deb
unzip xx.zip 解压缩zip文件
zip -r archive_name.zip directory_to_compress 压缩 目录到文件中
2.ros工作空间的构建
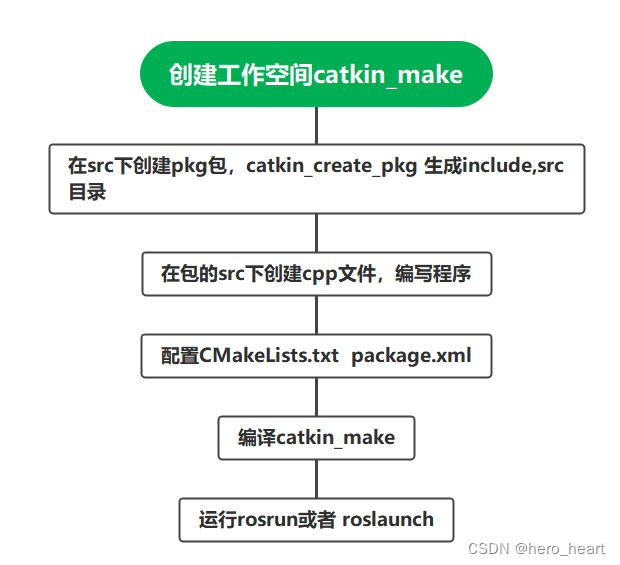
2.1 典型的功能包创建和运行过程
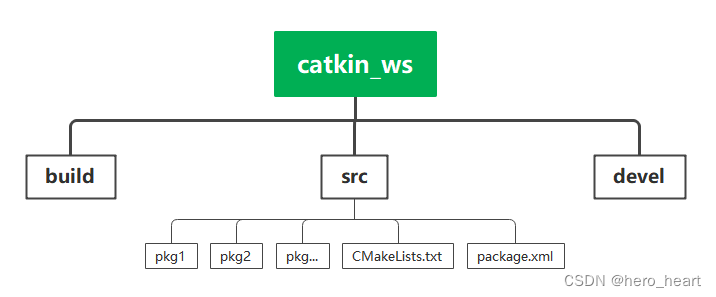
2.2一个ros工作空间的目录架构
2.3 代码过程
//1. 创建工作空间
mkdir -p ~/ws_test/src
//2. 进入工作空间
cd ws_test
//3. 初始化工作空间,会生成build,devel,build存放编译信息,devel存放可执行文件与相关依赖项,src文件存放代码
catkin_make//4. cd src
//5. 创建包,宝引用了roscpp
catkin_create_pkg helloworld roscpp //6. 写程序,鼠标点击helloworld包的src,创建helloworld.cpp文件,文件中写如下内容
int main(int argc, char** argv)
{ros::init(argc,argv, "node_name");ROS_INFO("helloworld");return 0;
}//7. 在CMakeLists.txt中配置, 指定生成可执行文件
add_executable(helloworld src/helloworld.cpp)
target_link_library(helloworld ${catkin_LIBRARY})//8. 对工作空间进行编译,回退到ws_test目录下
catkin_make编译//9.运行,在一个终端中启动roscore,在另一个终端中启动可执行文件rosrun pkg包名字 exe可执行文件名
//9.1 roscore
//9.2 source ./devel/setup.bash
rosrun helloworld helloworld
ros通讯机制
【摘抄书中的】同此歌行来说,一个移动机器人项目是多个进程协同完成的,除了极少部分进程可以独立完成自己的之外,其他的进程均需要进行进程之间的数据交互,因此进程间的通讯机制是构建复杂机器人项目的基础。
ROS节点
在ros的世界中,最小的进程单元就是节点Node,通常一个node负责机器人的一个单独模块。一个package中可以有多个可执行文件(通常为C++编译生成的可执行文件或者python脚本),可执行文件在运行之后就形成了一个进程,这个进程就是ros节点。
节点管理器master
节点管理器Master在整个网络通讯中相当于管理中心,管理着各个节点(Node),节点在启动的时候,首先要在Master中进行注册,之后Master会将该节点NODE纳入到整个ros系统中。Node之间的通讯也是由Master进行牵线,然后才能两两的进行点对点的通讯。当ROS节点启动的时候,首先启动Master,再由节点管理器以此启动Node。
换句话说,节点管理器实际上扮演了一个“通讯调度中心”的角色,它启动之后,各个Node之间才会建立相应的关联。但是,在Node连接建立之后,Master的任务就完成了,此时如果关闭Masetr,已经运行的Node之间的通信还可以继续进行。
ros通讯方式有4种,分别是:
1.topic话题通讯模式
2.Service服务模式
3.Parammeter Service模式
4.Actionlib模式
3.话题的订阅、发布、消息自定义
Topic话题订阅模式是一种ROS常见的通讯方式,对于实时性、周期性的消息,使用Topic模式来传输消息是最佳选择,Topic模式是一种点对点的单项通讯方式,这里的点指的是Node,也就是节点之间可以通过Topic来传递消息。Topic话题主要经历下面的初始化过程:首先,Publisher发布者节点和subscriber订阅者节点都要到节点管理器Master中进行注册;然后,Publisher会发布Topic话题,
每一个节点只接受话题所发布的数据,发布数据后至于接收者是否接收到数据,那就和这个节点无关了。结合小海龟,来说明一下话题发布和订阅如何使用:
//1.构建工作空间mkdir ~/mrobot_ws/srccatkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim这时候在src文件夹下生成了learing_topic/include和 learning_topic/src两个目录
//2. 在learning_topic/src下创建velocity_publisher.cpp文件,代码如下:
#include<ros/ros.h>
#include<geometry_msgs/Twist.h>
int main(int argc, char** argv)
{ros::init(argc, argv, "velocity_publisher");ros::NodeHandle nh;ros::Publisher turtle_vel_pub = ros::advertise<egometry_msgs::Twist>("turtle1/cmd_vel",10);ros::Rate loop_rate(10);while(ros::ok()){geometry_msgs Twist tw;tw.linear.x = 0.5;tw.angular.z = 0.2;turtle_vel_pub.pub(tw);ROS_INFO("Publish turtle velocity command["%0.2f m/s, %0.2f rad/s]", tw.linear.x, tw.angular.z);loop_rate.sleep();}
}//3. 配置 CMakeList.txt
add_executable(velocity_publisher src/velocity_publiser.cpp)
target_link_libraries(velocity_publiser ${catkin_LIBRARY})//4.编译以及运行
cd mrobot_ws
catkin_make
source ./devel/setup.bash
// 在一个终端中启动ros
roscore//在另一个终端中,启动小乌龟
rosrun turtlesim turtlesim_node//在第三个终端中启动velocity_publiser
rosrun learning_topic velocity_publiser//启动第四个终端中,查看消息
rostopic list消息订阅
//1.在learning_topic下的src文件夹下创建pose_subscriber.cpp文件,文件内容为:
#include<ros/ros.h>
#include<turtlesim/Pose.h>void poseCall(const turtlesim::Pose::ConstPtr& msg)
{ROS_INFO("turtle pse, x:%0.6f, y:%0.6f, msg->x, msg->y);
}int main(int argc, char** argv)
{ros::init(argc,argv,"pose_subsrciber");ros::NodeHandle nh;ros::Subscriber pose_sub = ros::subscribe("/turtle1/pose",10,poseCall);ros::spin();
}//2.在CMakeList.txt中写入
add_executable(pose_subscriber src/pose_subsrciber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})//3.编译并运行
cd mrobot_ws
catkin_make
source ./devel/setup.bash
//3.1在第一个终端中启动ros
roscore
//3.2在第二个终端中启动小乌龟
rosrun turtlesim turtlesim_node//3.3在第三个终端中,使用订阅者
source ./devel/setup.bash
rosrun learning_topic pose_subscribertopic消息自定义
//1.在learning_topic文件夹下创建msg文件,msg文件夹下创建Person.msg文件,内容如下:string nameuint8 sexuint8 ageuint8 unknown = 0uint8 male = 1uint8 female = 2//2.在package.xml中添加功能包依赖项,将如下内容添加到package.xml中<build_depend>message_generation</build_depend>
<build_export_depend>message_generation</build_export_depend>
<exec_depend>message_runtime</exec_depend>//3.在CMakeList.txt中添加编译选项,将以下内容添加到CMakeLists.txt文件的对应位置find_package(... message_generation...)catkin_package(... CATKIN_DEPENDS roscpp rospy std_msgs turtlesim geometry_msgs message_runtime ...)add_message_files(FILES Person.msg)generate_message(DEPENDENCIES std_msgs)//4. 编译程序cd mrobot_wscatkin_make/*----------------------------发布消息------------------------------------*///1.在learning_topic/src目录下创建person_publisher.cpp文件,内容为:
#include<ros/ros.h>
#include<learning_topic/Person.h>
int main(int argc, char** argv)
{ros::init(argc,argv,"person_publisher");ros::NodeHandle nh;ros::Publisher person_info_pub = ros::advertise<learning_topic::Person>("/person_info",10);ros::Rate loop_rate(10);while(ros::ok()){learning_topic lt;lt.name = "Tom";lt.age = 18;lt.sex = learning_topic::Person::male;person_info_pub.pub(lt);ROS_INFO("Publish Person Info: name: %s, age:%d, sex:%d", lt.name.c_str(),lt.age,lt.sex);loop_rate.sleep();}
}//2.在CMakeLists.txt中添加
add_executable(person_publisher src/person_publisher.cpp)
target_link_libraries(person_publisher ${catkin_LIBRARIES})
add_dependencies(person_publisher ${PROJECTION_NAME}_generate_messages_cpp)/*********************************订阅消息***********************/
//1. 在learning_topic/src目录下新建person_subscribe.cpp文件,文件内容为:
#include<ros/ros.h>
#include<learning_topic/Person.h>void person_info_callBack(const learning_topic::Person::ConstPtr& msg)
{ROS_INFO("subscribe person info: name: %s, age: %d, sex: %d",msg->name, msg->age, msg->sex);
}int main(int argc, char** argv)
{ros::init(argc,argv,"subscribe_person_info");ros::NodeHandle nh;ros::Subscriber sub = nh.subscribe("/person_info",10,person_info_callBack);ros::spin();}//2. 配置CMakeLists.txt
add_executable(person_subscriber src/person_subscriber.cpp)
target_link_libraries(person_subscriber ${catkin_LIBRARIES})
add_dependencies(person_subscriber ${PROJECTION_NAME}_generate_messages_cpp)4.服务的订阅、发布、服务自定义
topic话题通讯方式是一种单向的通讯方式,单向通讯并不能完全满足通讯要求,这些任午请求后希望得到回复,并且这些业务是临时的非周期性的任五,如果采用topic话题通讯方式,将会造成大量不必要的浪费。为了解决问题,ROS提供了service服务模式,service服务包含两个部分:一部分是请求方(CLient),另一部分是应答方(Server).service是双向的,Client发送一个请求Request给Server,要等待Server处理并反馈一个Reply,这样通过“请求-应答”机制完成了整个服务通讯。
请求方Client创建具体步骤如下:
//1. 创建实例项目
cd ~/mrobot_ws/src
catkin_create_pkg learning_service roscpp rospy std_msgs geometry_msgs turtlesim//2. 在learning_service/src文件夹下,建turtle_spqwn_request.cpp文件,内容如下:
#include<ros/ros.h>
#include<turtlesim/Spawn>int main(int argc, char** argv)
{ros::init(argc,argv, "turtle_spqwn");ros::service::waitForService("/spawn")ros::ServiceClient add_turtle = nh.serviceClient<turtlesim::Spawn>("/spawn");turtlesim::Spawn srv;srv.request.x = 2.0;srv.request.y = 2.0;srv.request.name = "turtle2";ROS_INFO("Call service to spawn turtle[x:%0.6f, y:%0.6f,name:%s]",srv.request.x, srv.request.y, srv.request.name);add_turtle.call(srv);ROS_INFO("Spawn turtle successfully[name:%s]", srv.response.name.c_str());}//2.CMakeList.txt添加
add_executable(turtle_spawn_request src/turtle_spawn_request.cpp)
target_link_libraries(turtle_spawn_request ${catkin_LIBRARIES})//3. 编译并运行程序
catkin_make
//3.1启动第一个终端
roscore
//3.2启动第二个终端
source ./devel/setup.bash
rosrun turtlesim turtlesim_node//启动第三个终端
source ./devel/setup.bash
rosrun learning_topic turtle_spawn_request/*************************服务端***********************/
#include<ros/ros.h>
#include<turtlesim/Spawn>ros::Publisher turtle_vel_pub;
bool pubCommand = false;bool commandCallBack(std_srvs::Trigger::Request& req, std_srvs::Trigger::Response& res)
{pubCommand = !pubCommand;ROS_INFO("Publish turtle velocity command[%s]", pubCommand == true? "YES":"NO");res.success = true;res.message = "change turtle command state!";return true;
}int main(int argc, char** argv)
{ros::NodeHandle nh;ros::ServiceServer command_service = nh.advertiseService("/turtle_command",commandCallBack);turtle_vel_pub = nh.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel",10);ros::Rate loop_rate(10);while(ros::ok()){ros::spineOnce();if(pubCommand){ geometry_msgs::Twist vel_msg;vel_msg.linear.x = 0.5;vel_msg.angular.z = 0.2;turtle_vel_pub.pub(vel_msg);}loop_rate.sleep();}}//CMakeLists.txt 中编译
add_excutable(turtle_command_server src/turtle_command_server.cpp)
target_link_libraries(turtle_command_server ${catkin_LIBRARIES});//3. 编译运行
catkin_make
roscore
rosrun turtlesim turtlesim_node//启动第三个终端
source ./devel/setup.bash
rosrun learning_service turtle_command_server
rosservice call/turtle_command"{}"4.action的订阅、发布、action自定义
5.TF变换
6.param文件 param,node,group,rosparam
参数命令
rosparam list 列出当前所参数
rosparam get param_key //显示某个参数值
rosparam set param_key param_value // 设置某个参数值
rosparam dump file_name // 保存参数到文件
rosparam load file_name // 从文件中读取参数
rosparam delete param_key // 删除参数
用法:
//1.创建包
cd ~/catkin_ws/src
catkin_create_pkg learning_parammeter roscpp rospy std_srvs//2.在learning_parameters的src下创建parameter_config.cpp文件,内容如下:
#include<string>
#include<ros/ros.h>
#include<std_srvs/Empty.h>int main(int argc, char** argv)
{ros::init(argc, argv, "parameter_config");ros::NodeHandle nh;int red, green, blue;ros::param::get("/turtlesim/background_r",red);ros::param::get("/turtlesim/background_r",green);ros::param::get("/turtlesim/background_r",blue);ros::param::set("/turtlesim/background_r",red);ros::param::set("/turtlesim/background_r",green);ros::param::set("/turtlesim/background_r",blue);ros::service::waitForService("clear");ros::ServiceCLient clear_background = nh.serviceCLient<std_srvs::Empty>("/clear");std_srvs::Empty srv;clear_background.call(srv);
}//2.在CMakeLists.txt中
add_executable(learning_parammeter src/learning_parammeter.cpp)
target_link_libraries(learning_parammeter ${catkin_LIBRARIES)};//3.编译运行
//3.1启动第一个终端
roscore
//3.2启动第二个终端
rosrun turtlesim turtlesim_node
//3.3启动第三个终端
source devel/setup.bash
rosrun learning_parameter parameter_config7.launch文件
launch 文件格式为
<launch>...
</launch>
1. roslaunch 命令
roslaunch [package] [filename.launch]
package是一个包名,file.launch是一个launch文件名字。通常一个pkg包含了多个可执行文件,而多个可执行文件可以用launch文件同时启动。比如启动 小乌龟 roslaunch learning_tf start_turtle.launch
roslaunch中<>类型主要有以下几种
<launch><node .../><rosparam .../><remap .../><machine .../><param .../><include .../><env .../><arg .../><test .../><group> </group>
</launch>
- node
<node pkg ="learning_tf" type = "turtle_tf_broadcaster" args = "/turtle1" name ="turtle1_tf_broadcaster" respawn="true" output="sceen"/>pkg为包名,
type为节点名字,也就是ros::init()第三个参数的名字,
name为可执行文件名字,
args为传入的参数
respawn 是否重新启动,如果设置为true,则非自然退出后会自动重启
output 是否将节点信息输出到屏幕,如果不设置该属性,则节点信息会被写入到日志文件;
在 node 标签下页可以嵌套使用以下标签:
- env:为节点设置环境变量
- remap:为节点设置重映射参数
- rosparam:为节点加载 rosparam 文件
- param:为节点设置参数
2.rosparam
<param name="flush_frequency" type="double" value="1.0">
name表示参数名
type表示参数类型
value表示参数值
<remap from="A" to="B">
from:原始名称
to:新名称
A和B数据类型相同,可以将A简单地替换为B,从而订阅B话题。
<launch><machine name="foo" address="foo-address" env-loader="/opt/ros/kinetic/env.sh" user="someone"><node machine="foo" name="footalker" pkg="test_ros" type="talker.py">
</launch>
主要参照这一
ROS-Launch的使用方式_roslaunch-CSDN博客
8.如何用在实际中?
————————————————
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
原文链接:https://blog.csdn.net/2301_80395245/article/details/139304457