RGB颜色的区域生长算法
- 一、概述
- 1.1 算法定义
- 1.2 算法特点
- 1.3 算法实现
- 二、代码示例
- 三、运行结果
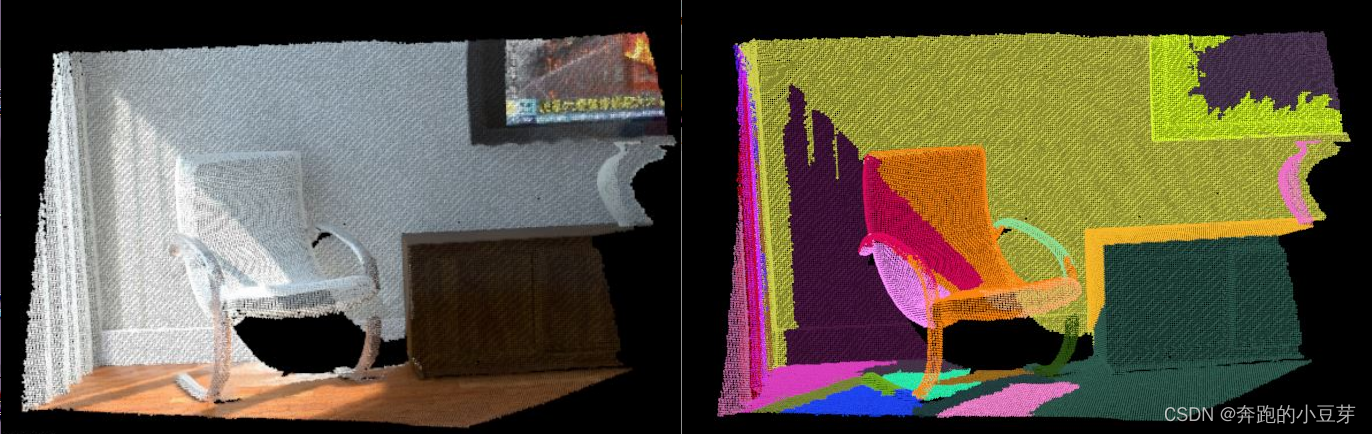
🙋 结果预览
一、概述
1.1 算法定义
点云RGB区域生长算法: 是一个基于RGB颜色信息的区域生长算法,用于点云分割。该算法利用了点云中相邻点之间的颜色相似性来将点云分割成不同的区域。
1.2 算法特点
基于颜色的区域生长分割与普通区域生长有两个主要区别:
- 首先,它使用颜色信息而不是法线信息。
- 其次,它使用合并算法来控制过度分割和欠分割问题。具体实现是:在分割之后会尝试合并具有相近颜色的聚类。如果两个相邻聚类的平均颜色差异很小,它们将被合并在一起。然后是第二个合并步骤。在这个步骤中,每个聚类都会根据其所包含的点的数量进行验证。如果这个数量小于用户定义的值,那么当前聚类将与最近的相邻聚类合并。
1.3 算法实现
如何使用pcl::RegionGrowingRGB类来实现这个过程:
- 初始化pcl::RegionGrowingRGB对象:你需要创建一个pcl::RegionGrowingRGB类的实例,并设置必要的参数,如颜色阈值、最小聚类大小等。
- 设置输入点云:你需要将包含RGB颜色信息的点云作为输入传











![拓扑排序[讲课留档]](https://img-blog.csdnimg.cn/direct/0b8cfc92ecea4441b8020b2bd6d8c1cb.png)

