参考面试官:简单说一下阻塞IO、非阻塞IO、IO复用的区别 ?_unix环境编程 阻塞io和非阻塞io-CSDN博客
同步阻塞(BIO)
BIO 以流的方式处理数据
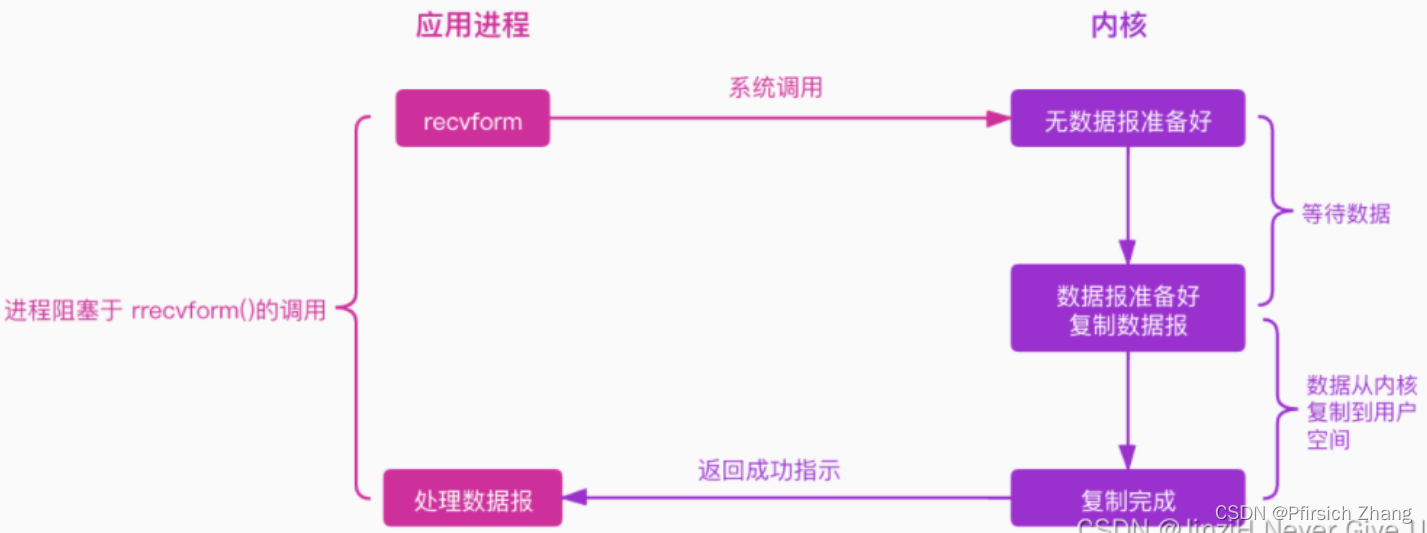
应用程序发起一个系统调用(recvform),这个时候应用程序会一直阻塞下去,直到内核把数据准备好,并将其从内核复制到用户空间,复制完成后返回成功提示,这个时候应用程序才会继续处理数据。
服务实现模式为一个连接对应一个线程,即客户端发送一个连接,服务端要有一个线程来处理。
- 缺点
一旦有高并发的大量请求,就会有如下问题: 1)线程不够用,就算使用了线程池复用线程也无济于事(一台机器需要维护 1 万个连接,相当于要维护 1 万个进程/线程,操作系统就算死扛也是扛不住的);2)阻塞I/O模式下,会有大量的线程被阻塞,一直在等待数据,这个时候的线程被挂起,只能干等,CPU利用率很低,换句话说,系统的吞吐量差;3)如果网络I/O堵塞或者有网络抖动或者网络故障等,线程的阻塞时间可能很长,整个系统也变的不可靠;4)服务器线程太多,压力太大,导致服务器宕机。
同步非阻塞(NIO)
NIO 以缓冲区的方式处理数据,缓冲区 I/O 的效率比流 I/O 高很多
应用进程需要不断询问内核数据是否就绪,在内核数据还未就绪时,应用进程还可以做其他事情。
服务实现模式是一个线程可以处理多个连接,即客户端发送的连接都会注册到多路复用器上,然后进行轮询连接,有I/O请求就处理。

- 优点:模型简单,实现难度低;与阻塞IO模型对比,它在等待数据报的过程中,进程并没有阻塞,它可以做其他的事情。
-
缺点:轮询发送 recvform,消耗CPU 资源。
I/O多路复用
在没有使用IO多路复用机制时,有BIO、NIO两种实现方式,但是会出现阻塞或者开销大的问题
参考这次答应我,一举拿下 I/O 多路复用! (qq.com)
非阻塞IO模型需要进程不断地轮询发起recvform系统调用,就会有很多的线程不断调用recvfrom 请求数据,先不说服务器能不能扛得住这么多线程,就算扛得住那么很明显这种方式是不是太浪费资源了,线程是我们操作系统的宝贵资源,大量的线程用来去读取数据了,那么就意味着能做其它事情的线程就会少。
select/poll/epoll 这是三个多路复用接口,都能实现 C10K 吗?接下来,我们分别说说它们。
select/poll
select 实现多路复用的方式是,将已连接的 Socket 都放到一个文件描述符集合,然后调用 select 函数将文件描述符集合拷贝到内核里,让内核来检查是否有网络事件产生,检查的方式很粗暴,就是通过遍历文件描述符集合的方式,当检查到有事件产生后,将此 Socket 标记为可读或可写, 接着再把整个文件描述符集合拷贝回用户态里,然后用户态还需要再通过遍历的方法找到可读或可写的 Socket,然后再对其处理。
所以,对于 select 这种方式,需要进行 2 次「遍历」文件描述符集合,一次是在内核态里,一个次是在用户态里 ,而且还会发生 2 次「拷贝」文件描述符集合,先从用户空间传入内核空间,由内核修改后,再传出到用户空间中。
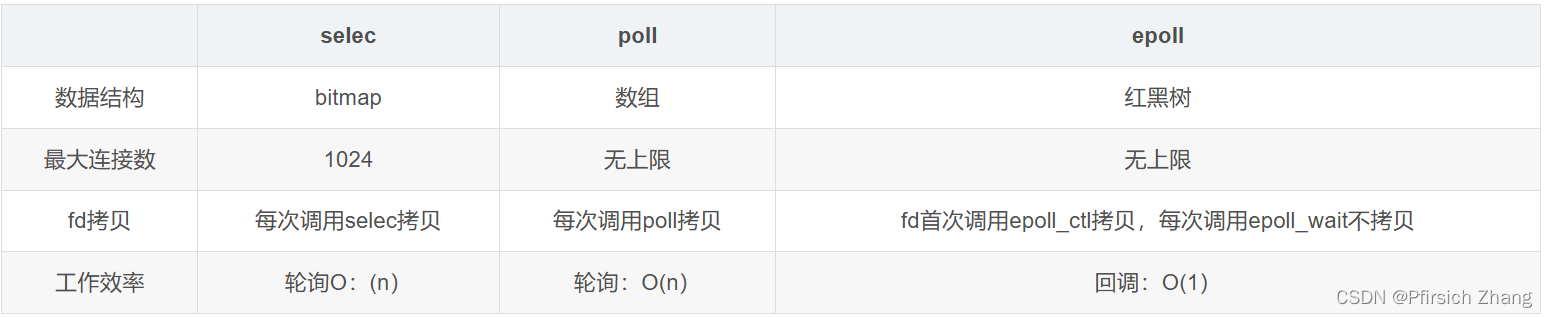
select 使用固定长度的 BitsMap,表示文件描述符集合,而且所支持的文件描述符的个数是有限制的,在 Linux 系统中,由内核中的 FD_SETSIZE 限制, 默认最大值为 1024,只能监听 0~1023 的文件描述符。
poll 不再用 BitsMap 来存储所关注的文件描述符,取而代之用动态数组,以链表形式来组织,突破了 select 的文件描述符个数限制,当然还会受到系统文件描述符限制。
但是 poll 和 select 并没有太大的本质区别,都是使用「线性结构」存储进程关注的 Socket 集合,因此都需要遍历文件描述符集合来找到可读或可写的 Socket,时间复杂度为 O(n),而且也需要在用户态与内核态之间拷贝文件描述符集合,这种方式随着并发数上来,性能的损耗会呈指数级增长。
epoll
epoll 通过两个方面,很好解决了 select/poll 的问题。
第一点,epoll 在内核里使用红黑树来跟踪进程所有待检测的文件描述字,把需要监控的 socket 通过epoll_ctl()函数加入内核中的红黑树里,红黑树是个高效的数据结构,增删查一般时间复杂度是O(logn),通过对这棵黑红树进行操作,这样就不需要像 select/poll 每次操作时都传入整个 socket 集合,只需要传入一个待检测的 socket,减少了内核和用户空间大量的数据拷贝和内存分配。
第二点, epoll 使用事件驱动的机制,内核里维护了一个链表来记录就绪事件,当某个 socket 有事件发生时,通过回调函数内核会将其加入到这个就绪事件列表中,当用户调用epoll_wait()函数时,只会返回有事件发生的文件描述符集合,不需要像 select/poll 那样轮询扫描整个 socket 集合,大大提高了检测的效率。
从下图你可以看到 epoll 相关的接口作用:

epoll 的方式即使监听的 Socket 数量越多的时候,效率不会大幅度降低,能够同时监听的 Socket 的数目也非常的多了,上限就为系统定义的进程打开的最大文件描述符个数。因而,epoll 被称为解决 C10K 问题的利器。
epoll 支持两种事件触发模式,分别是边缘触发(edge-triggered,ET)和水平触发(level-triggered,LT)。
这两个术语还挺抽象的,其实它们的区别还是很好理解的。
-
使用边缘触发模式时,当被监控的 Socket 描述符上有可读事件发生时,服务器端只会从 epoll_wait 中苏醒一次,即使进程没有调用 read 函数从内核读取数据,也依然只苏醒一次,因此我们程序要保证一次性将内核缓冲区的数据读取完;
-
使用水平触发模式时,当被监控的 Socket 上有可读事件发生时,服务器端不断地从 epoll_wait 中苏醒,直到内核缓冲区数据被 read 函数读完才结束,目的是告诉我们有数据需要读取;
举个例子,你的快递被放到了一个快递箱里,如果快递箱只会通过短信通知你一次,即使你一直没有去取,它也不会再发送第二条短信提醒你,这个方式就是边缘触发;如果快递箱发现你的快递没有被取出,它就会不停地发短信通知你,直到你取出了快递,它才消停,这个就是水平触发的方式。
这就是两者的区别,水平触发的意思是只要满足事件的条件,比如内核中有数据需要读,就一直不断地把这个事件传递给用户;而边缘触发的意思是只有第一次满足条件的时候才触发,之后就不会再传递同样的事件了。
如果使用水平触发模式,当内核通知文件描述符可读写时,接下来还可以继续去检测它的状态,看它是否依然可读或可写。所以在收到通知后,没必要一次执行尽可能多的读写操作。
如果使用边缘触发模式,I/O 事件发生时只会通知一次,而且我们不知道到底能读写多少数据,所以在收到通知后应尽可能地读写数据,以免错失读写的机会。因此,我们会循环从文件描述符读写数据,那么如果文件描述符是阻塞的,没有数据可读写时,进程会阻塞在读写函数那里,程序就没办法继续往下执行。所以,边缘触发模式一般和非阻塞 I/O 搭配使用,程序会一直执行 I/O 操作,直到系统调用(如 read 和 write)返回错误,错误类型为 EAGAIN 或 EWOULDBLOCK。
一般来说,边缘触发的效率比水平触发的效率要高,因为边缘触发可以减少 epoll_wait 的系统调用次数,系统调用也是有一定的开销的的,毕竟也存在上下文的切换。
select/poll 只有水平触发模式,epoll 默认的触发模式是水平触发,但是可以根据应用场景设置为边缘触发模式。












![[学习笔记]SQL学习笔记(连载中。。。)](https://i-blog.csdnimg.cn/direct/7741e25a09244ba5a5008993bf5341dd.png)

