三月已过半旬,已是春暖花开的季节,也是我们科研爱好者最繁忙的一段时间。春天的到来,意味着新一届的学子即将离开学校,走向自己人生的第二段道路,也意味着您年伊始,所有的工作、项目、计划等都要开始步入正轨,在此,本平台祝愿各位事事顺心,事事顺利。
那今天就开始我们的正是话题——场景3D重建。
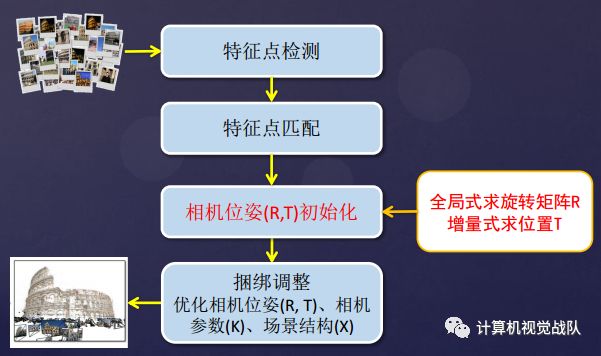
图像全自动三维建模系统

其中,图像三维建模系统框架如下:

核心算法之一:
融合辅助信息的全局式稀疏重建

核心算法之二:
混合式稀疏重建
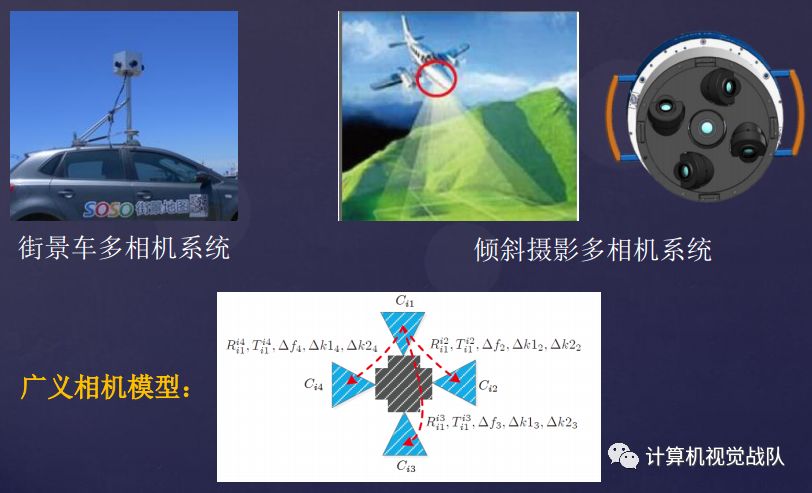
核心算法之三:
多相机系统稀疏重建
核心算法之四:
邻域图像组最优选择


核心算法之五:
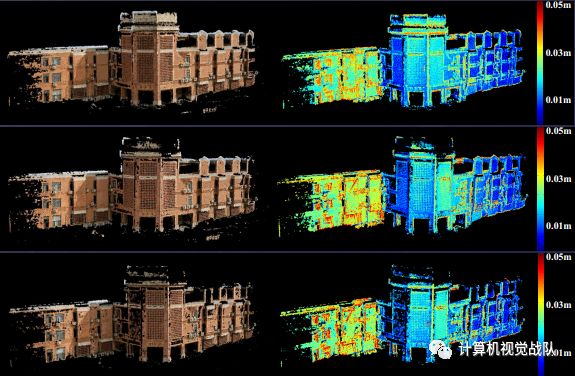
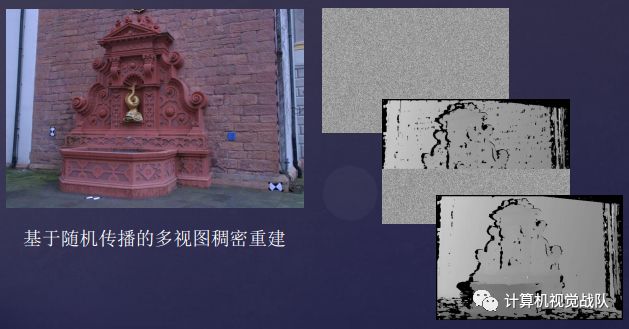
基于深度图融合的稠密重建

在上图中,从左到右分别是:Depth-map computation,Depth-map refinement,Depth-map merging。

核心算法之六:
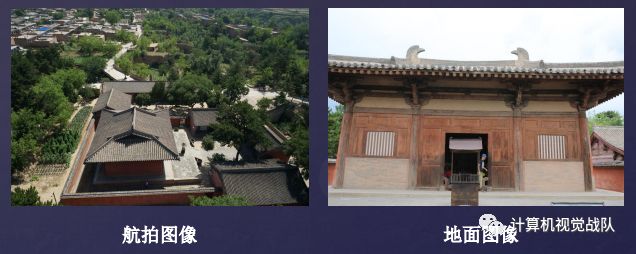
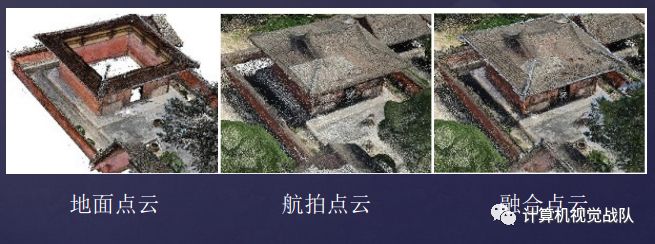
天地点云融合

核心算法之六:
点云语义分类

说到语义,我在此插入一些话,就是最近谷歌的DeepLab V3+已经开源了,有机会想和大家分享一下相关知识,如有兴趣的您,可以期待下,谢谢!
其实,在这个领域还有很多核心算法模型,但是就会有人问,这类算法具体应用在哪呢?接下来和大家说说其具体应用。
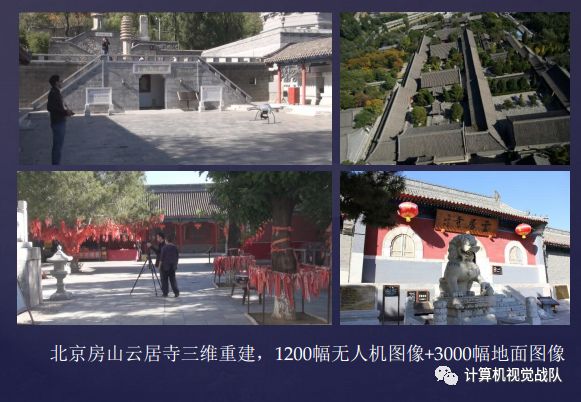
应用一:中国古代建筑三维数字化保护

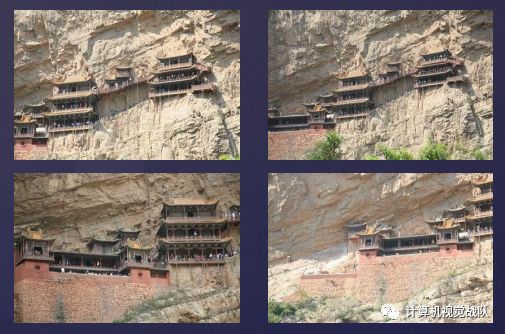
恒山悬空寺:位于山西浑源县, 始建于公元491年,古代工匠根据道家“不闻鸡鸣犬吠之声”的要求建设了悬空寺,该寺距地面高约50米。
应用二:三维数字化城市

应用三:无人机三维地图构建

应用四: 天地、室内外融合三维重建

本次参考内容来自中国科学院自动化研究所-模式识别国家重点实验室申抒含老师,如果有兴趣的朋友,可以去http://vision.ia.ac.cn进一步学习。本次内容简单,主要简单介绍场景构造的轮廓,如果想进一步探索研究,需要阅读大量文献,进一步深入学习!