前言
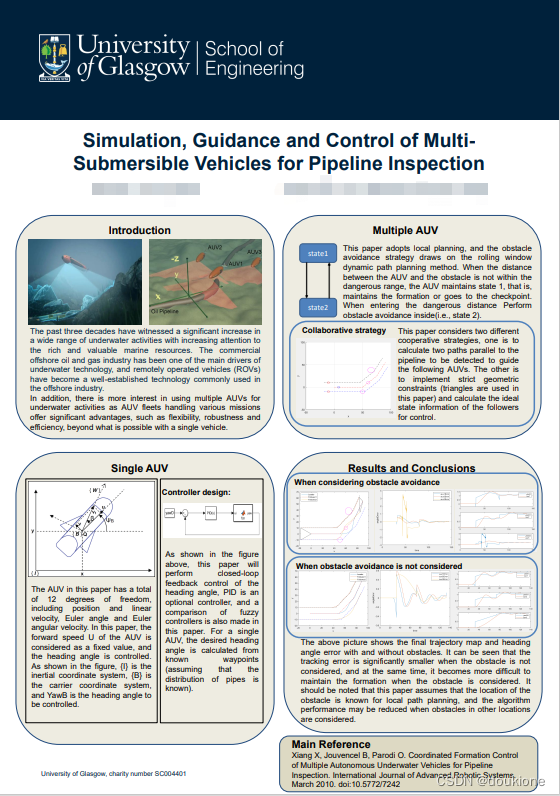
写在前面,这是格大的工学院的一个毕设题目。课题要求对多个AUV进行编队控制,完成一个假定的任务,期间涉及的技术首先是对单个AUV的控制器设计,路径规划设计,其次是考虑编队控制,需要设计编队策略。
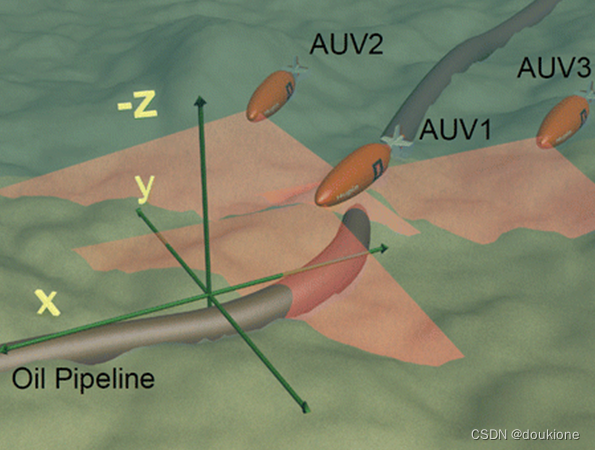
当时设计的场景是让三个AUV保持三角阵型沿着水下的石油管道做勘探。
以下做一个简单的回顾,记录一下。
控制器
使用了PID控制器和模糊控制器,最后两者的表现差不太多。
路径规划
当时其实是没有做这一块的部分的,简单设计了几个障碍物而已。但是现在工作后做的就是路径规划的一部分,这一部分其实有很多细节可以加进去。
编队策略
选用了领航者策略
贴一下海报做个纪念