【导读】本文从波士顿动力背后申请的专利入手,从动力系统、步态分析,详细探讨了波士顿动力机器人背后的技术实现。

波士顿动力四足机器人的发展历程(前世今身)
相比于轮式或履带机器人,波士顿足式机器人具有更强的地形适应能力,身体十分灵活,可以在各种崎岖不平的地面行走。
奔跑性能极强的Wildcat

平衡力极强的Spot

不惧摔倒的SpotMini
欢乐起舞的新版SpotMini
经过一年年的技术迭代,波士顿动力的四足机器人不再仅仅是应对军方的大狗机器人,而越来越变得小巧灵活,适应力极强。
为了探索其背后的技术路线,我们对波士顿动力申请的专利进行了检索分析:
波士顿专利布局
对主要申请人Boston Dynamics进行检索,检索截止日期为2019年1月,其中涉及机器人的专利文献共有72篇,对其进行简单统计,可以得到如下结果:

波士顿动力的专利申请态势图
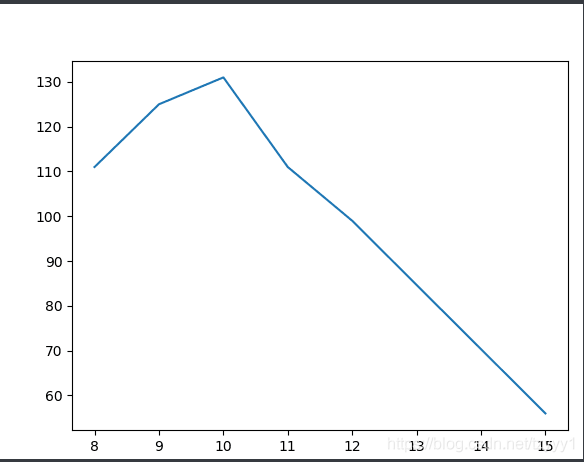
可以看出:从2001~2011年,波士顿动力共申请了4件有关足式机器人的专利,这十年是足式机器人技术的探索阶段,即专利布局的早期阶段;从2014年开始,波士顿动力在足式机器人的不同技术维度开始进行专利布局;直至2017年都保持了较高的申请量,这期间不断推出了足式机器人的改进版,于2016-2017年推出的SpotMini是更新换代的产品(爬楼梯的SpotMini),为其商业化应用奠定了基础。
如下图所示,通过对上述72篇专利进行分类标引,波士顿动力四足机器人的技术领域主要涉及液压驱动和电液混合驱动,上述技术保证了机器人具有较强的运动能力。而步态规划、平衡控制、复杂地形动态规划以及自我回正属于机器人的运动控制,同时也是波士顿的核心技术,上述技术使机器人更好的适应环境,维持动态平衡,实现智能移动。