多雷达协同探测技术 原始笔记链接:https://mp.weixin.qq.com/s?__biz=Mzg4MjgxMjgyMg==&mid=2247486627&idx=1&sn=f32c31bfea98b85f2105254a4e64d210&chksm=cf51be5af826374c706f3c9dcd5392e0ed2a5fb31ab20924b7dd38e1b1ae32abe9a48afa8174#rd
↑ \uparrow ↑ 打开上述链接即可阅读全文
雷达学报 2023 | 多雷达协同探测技术研究进展:认知跟踪与资源调度算法
多雷达探测论文阅读笔记:雷达学报 2023, 多雷达协同探测技术研究进展:认知跟踪与资源调度算法
文章目录
- 雷达学报 2023 | 多雷达协同探测技术研究进展:认知跟踪与资源调度算法
- 摘要
- 1 引言
- 2 多雷达协同探测
- 2.1 概念内涵
- 2.2 技术挑战
- 2.2.1 多雷达协同认知的控制闭环构建
- 2.2.2 通用的多通道高维信号与多源信息处理方法
- 2.2.3 具体探测任务驱动的高自由度系统全局资源调度能力
- 3 多雷达协同认知跟踪算法的闭环构建
- 3.1 多雷达协同探测的信号处理认知闭环
- 3.2 多雷达协同跟踪算法的认知闭环
- 3.2.1 认知跟踪算法及其特点
- 3.2.2 多目标跟踪场景及雷达系统描述
- 3.2.3 多雷达协同跟踪模型
- 3.2.4 跟踪信息融合架构
- 3.2.5 目标跟踪性能指标
- 3.2.6 资源调度问题及其优化准则
- 3.2.7 闭环结构的认知跟踪流程
- 4 多雷达协同认知跟踪资源调度算法进展
- 4.1 不同雷达属性及资源要素下的资源调度算法进展
- 4.1.1 雷达属性
- 4.1.2 资源要素
- 4.2 不同跟踪信息融合架构下的资源调度算法进展
- 4.2.1 集中式架构
- 4.2.2 分布式架构
- 4.3 不同目标跟踪性能指标下的资源调度算法进展
- 4.4 不同优化准则下的资源调度算法进展
- 4.4.1 任务性能最优准则
- 4.4.2 系统资源最小化准则
- 4.5 复杂任务场景下的资源调度算法进展
- 4.5.1 复杂目标运动模型
- 4.5.2 LPI条件下的认知跟踪
- 4.5.3 干扰环境下的认知跟踪
- 5 研究趋势与展望
摘要
- 多雷达协同探测技术
- 有机联动多部雷达
- 充分获取探测增益:空间、频率分集等
- 显著提升雷达系统 目标探测性能 和 电磁干扰环境顽存能力
- 雷达技术领域重点发展方向之一
- 近年来的研究的技术方向:
- 系统架构设计 、 信号处理 、 资源调度 等
- 本文
-
1 总结 多雷达协同探测技术的概念内涵
-
2 阐述 基于信号处理闭环反馈的协同机制
✅ 以及实现过程的技术挑战
-
3 聚焦 认知跟踪与资源调度算法
✅ 内涵特点
✅ 系统构成
✅ 跟踪模型
✅ 信息融合
✅ 性能评估
✅ 调度算法
✅ 优化准则
✅ 认知流程
✅ 分析 协同认知跟踪 与 系统资源调度的关系
-
4 梳理 协同认知跟踪与资源调度算法 研究进展 (从以下5方面:)
✅ 雷达资源要素
✅ 信息融合架构
✅ 跟踪性能指标
✅ 资源调度模型
✅ 复杂任务场景
-
5 总结展望发展趋势
-
1 引言
雷达探测环境和目标发生变化,发展雷达目标探测新机理与新方法迫在眉睫
-
生存环境上
- 各类民用电磁干扰
- 复杂军用电磁干扰
-
探测对象上
- 集群、微弱、隐身、高空、低空等多样化目标
- 探测对象向“多节点协同的体系化形态”快速演变
-
⇒ \Rightarrow ⇒ 发展雷达目标探测新机理与新方法迫在眉睫
单装雷达性能受限
- 现有雷达探测研究主要围绕 单装雷达 进行体制和方法创新,如
- 太赫兹雷达
- 量子雷达
- 认知雷达
- 频控阵雷达
- 单装雷达的限制:
- 孔径尺寸有限
- 系统能耗
- 收发共置地探测构型 + 后向散射探测机理
- ⇒ \Rightarrow ⇒ 面对隐身目标 / 主瓣干扰 等威胁时性能严重恶化
多雷达探测技术的优势
- 多雷达协同探测技术
- 有机联动多部雷达
- 形成广域分布的收发探测构型
- 打破单装雷达固有瓶颈
- 优势
-
通过 一体化资源调度 , 实现 多部雷达深度协同
-
利用 多部雷达的视角、频率、极化、能量、波形等观测资源 , 构建 更高维度的雷达信号空间
✅ 充分获取 空间分集 、 频率分集 等探测增益
✅ 利用能量优势,在高维空间中消减干扰
-
多雷达协同的关键技术
- 关键技术范围广:
- 系统组织架构设计
- 人机交互模式
- 大带宽通信传输
- 空时频高精度同步
- 高维信号协同处理
- 异质非同步信息融合
- 一体化资源调度等
- 其中,系统一体化资源调度:多雷达深度协同的机制保障,核心技术点之一
本文工作
- 现有协同机制的缺陷:
- 仍停留在低层次的协同 :如 点航迹信息融合、任务分工、任务交接等
- 严重制约了雷达协同探测的效能
需要具备资源要素级的多雷达一体化综合调度能力,才能真正实现多雷达协同
- 本文:
- 重点聚焦于多雷达一体化资源调度算法
- 围绕
雷达认知跟踪任务,梳理多雷达协同研究进展
2 多雷达协同探测
2.1 概念内涵
多雷达协同探测内涵宽泛,尚无 统一且清晰的界定
易与以下概念混淆:
- 组网雷达
- 网络化雷达
- 多基地雷达
- 分布式雷达
- 本文中的定义:
- 多雷达协同探测:一种广义的雷达探测方式,而非一种特定体制的雷达系统
多雷达协同探测具备以下4大要素:
-
要素1 探测构型呈现多节点分布式布局形态
- 采用有线/无线 网络级联 多个雷达节点
- 信息交互 ⇒ \Rightarrow ⇒ 形成空间上广域分布的协同探测构型
-
要素2 基于态势输入的任务和预案生成
-
能够 根据当前探测区域的态势信息 生成
✅ 态势:即具体情况
🚩 完成面向态势的搜索、跟踪、拦截 等具体探测任务
-
拥有 对探测任务执行预案 的 离线模板匹配 / 自适应生成能力
-
-
要素3 以具体探测任务为目标的一体化资源调度与多节点深度协同能力
-
围绕具体任务,能够通过一体化资源调度实现多节点深度协同
✅ 具体任务:如区域搜索、目标跟踪和识别等
✅ 一体化资源调度:综合管控系统整体资源,达到多个雷达节点紧密配合和深度协同
✅ 多节点深度协同:实现情景形态和探测任务的动态组合、客观适变、最佳探测
-
-
要素4 多通道高维信号与多源信息的综合处理能力
- 能够通过通信传输和计算存储架构,利用合适的多源信息融合方法,完成对多类型数据的最优综合处理,实现理想的雷达功能
- 多类型数据 :由空间广域分布的多个雷达,获得的多通道高维回波信号,并形成信号级、信息级、情报级 的多类型数据
- 通信传输和计算存储 :有中心、无中心、多中心
- 信息融合方法 :相参、非相参、点航迹多源信息融合等
- 理想的雷达功能 :如目标探测、跟踪、识别、定位、成像、干扰抑制等
总结 :1. 分布式布局 ;2. 基于任务生成 ;3. 一体化资源调度 ;4. 多通道高维信号与多源信息综合处理
- 显然,组网雷达、网络化雷达、多基地雷达、分布式雷达等仅能部分满足上述4要素
多雷达协同的优势
-
获取的信号维度 角度:
- 为高性能探测提供信号(信息)基础
- 利用空间上广域部署的射频天线可以接收到 不同时间、波形、角度、频率、极化等的 目标 多维散射信号
- 大幅增加目标不同特性的观测样本
- 获取 空间分集 频率分集 等 探测增益
-
应对多元化探测任务 角度:
- 为多元化多任务 探测 提供 硬件基础
- 探测平台 与 自适应控制算法、 人工智能 和 指战员 之间的交互,能够支撑多雷达任务规划、任务执行预案的在线生成
- 有效提升多元化探测任务的执行效能
-
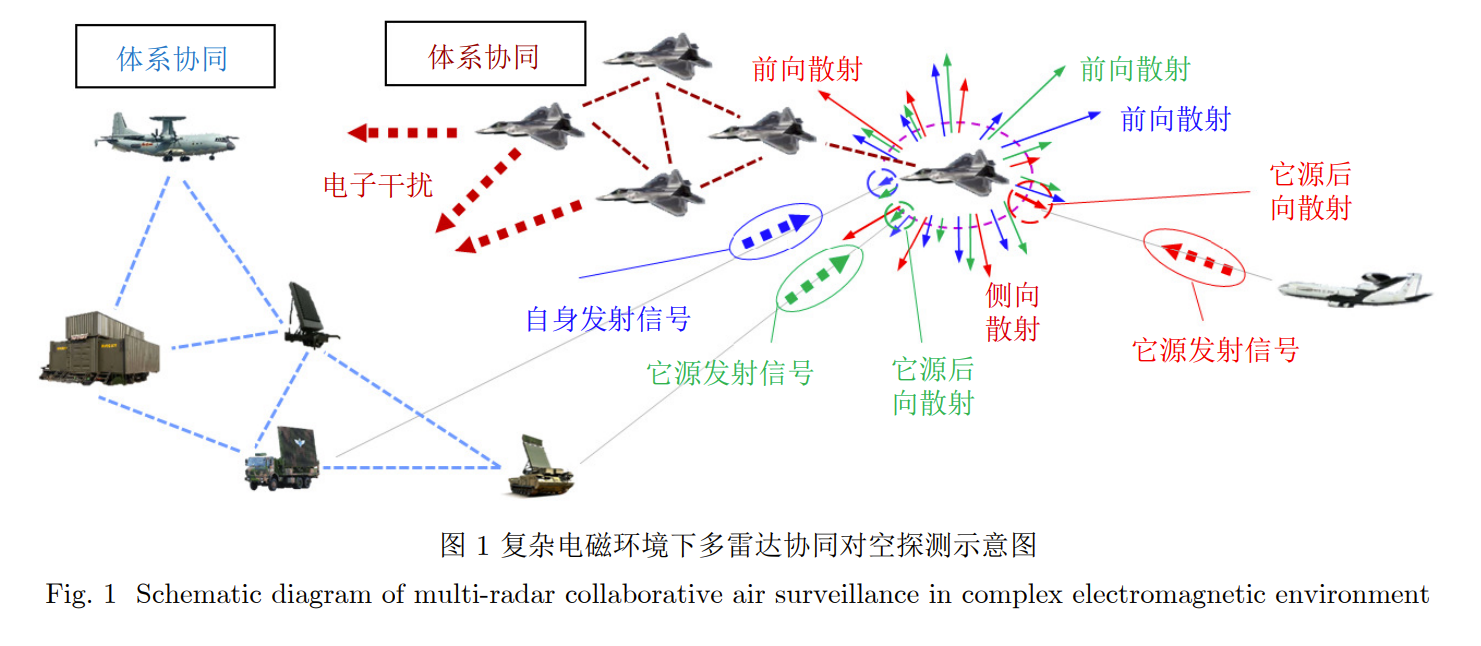
应对复杂电磁环境 角度:
- 干扰信号很难在全新号维度及其各变换域空间完全模拟目标信号
- 而多雷达协同:构建了更高维度的信号空间
- 为目标和干扰信号的区分,消减干扰的能量优势 提供条件
-
应对多节点体系化形态的新型探测对象 角度
- 形成 “体系协同” 对抗 “体系协同” 均势
总结 :多雷达协同探测 本质上是从 探测构型、信号维度、系统自由度等方向,由低维度向高维度演进 ⇒ \Rightarrow ⇒ 符合雷达技术发展趋势
组网雷达等传统多雷达体制 VS 多雷达协同探测
- 组网雷达等系统 : 宏观的多雷达协同探测理念在不同软硬件条件下的中间形态表现形式
- 例如,组网雷达系统:受通信、同步、计算等能力限制的早期的多雷达协同 ⇒ \Rightarrow ⇒ 多个自发自收雷达节点简单组网协同

2.2 技术挑战
多雷达协同已有基础条件:
- 大带宽通信
- 高精度时空频基准
- 网络云计算 等
- 但 仍面临诸多挑战
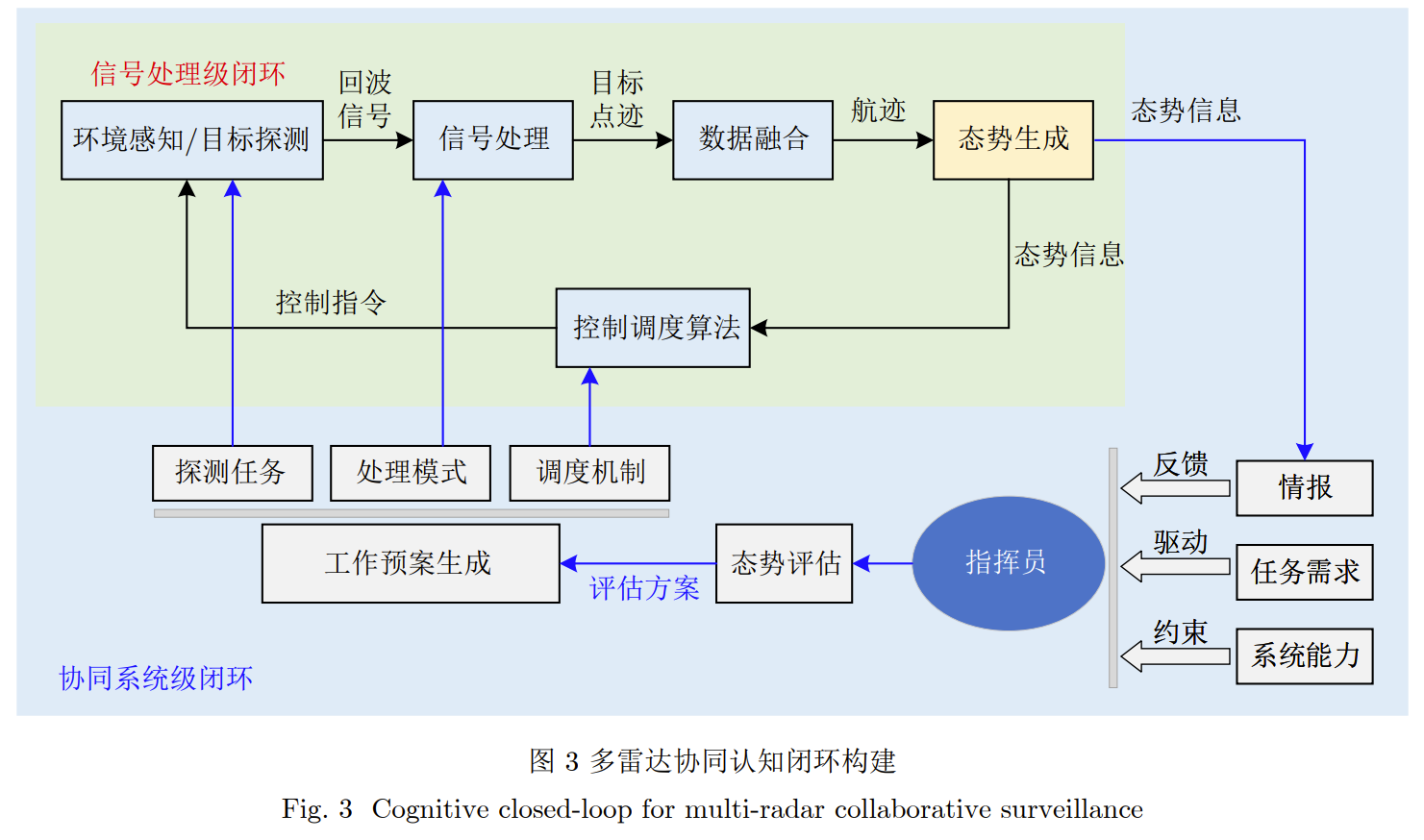
2.2.1 多雷达协同认知的控制闭环构建
- 构建多雷达协同认知闭环的重要性:
- 充分利用探测资源
- 实现探测平台 精准、深度、实时 协同
- 有效提升探测系统威力
- 多雷达协同认知闭环的含义;
-
狭义:信号处理算法级闭环
✅ 由 目标信号处理 、 多雷达数据融合 、 雷达资源控制调度 三个要素font color=red face=“Segoe Print, STKaiti”>3要素** 构成的 “感知-处理-决策” 闭环
-
广义:综合考虑探测环境、装备条件、情报信息、指挥员决策、人机智能交互等多要素融合后 的 协同系统级闭环
✅ 旨在将指挥员的决策与协同探测硬件平台结合以构成信息的回路
✅ 完成相关工作预案的生成
✅ 实现 人-机 机-机 间深度协同
-
制定通用、高效的认知闭环式协同探测系统设计的难点:
- 因为 协同闭环的构建涉及 人 环境 机器 多要素协调配合
2.2.2 通用的多通道高维信号与多源信息处理方法
- 多雷达大幅增加了观测样本数量和回波信号空间维度
- 不同扫描时间
- 不同收发角度
- 不同波形、频率、极化等
⇒ \Rightarrow ⇒ 研究匹配的高维信号处理与信息融合方法至关重要
- 现有融合方法 无法 简单推广 到 多雷达协同探测
-
简单组网雷达 :仅进行了 点航迹数据级协同融合处理
-
分布式阵列相参合成雷达、C-MIMO雷达:仅适用于收发阵列临近布置的情况
❌ 收发天线无法获取目标多角度电磁散射特性 + 空间分集增益
❌ 多通道信号相参处理需要信号时间、相位严格同步
-
D-MIMO雷达:适用于广域分布收发阵列,但也需要同频段 + 时间同步
❌ 无法处理多个雷达扫描波束时间不同步导致的波束追赶问题
-
2.2.3 具体探测任务驱动的高自由度系统全局资源调度能力
-
多雷达协同探测系统的全局资源调度能力
-
多雷达协同可以提供更丰富的探测资源,如空间、时间、频率、极化、波形、功率等
🚩 但是系统自由度增加,资源调度也更加复杂
-
要充分发挥系统潜力,需要任务驱动,以全局态势为基础,进行动态最优调度
-
现有雷达协同的资源调度还停留在任务分工、交接等较低层次,需要具备资源要素级的调度能力
-
-
全局资源调度的重要性
- 资源调度是实现多雷达深度协同的机制保障
- 资源调度实现对资源要素的综合管控,从而实现探测任务的动态组合与最佳匹配
- 资源调度可大幅提升探测效能和生存对抗能力
- 资源调度使多雷达形成“体系协同”应对“体系协同”的新型探测目标
- 资源调度是多雷达协同探测的核心技术点之一
-
全局资源调度面临的技术难点
-
现有雷达调度理论和方法主要面向单一雷达系统
✅ 面向多雷达协同探测的资源调度理论和方法还在起步阶段
-
高维资源和复杂约束使建模和求解非常困难
-
如何设计通用、高效的资源调度机制是难点之一
-
本文 :
- 聚焦于信号处理算法的闭环
- 以多雷达协同认知跟踪与资源管理问题为牵引
- 对多雷达协同探测瓶颈问题进行梳理和探讨
3 多雷达协同认知跟踪算法的闭环构建
- 围绕信号处理级闭环
- 介绍多雷达协同探测的信号处理认知闭环的概念 (3.1)
- 以目标跟踪任务为例
- 总结认知跟踪与资源调度信号处理算法闭环的构建流程 (3.2)
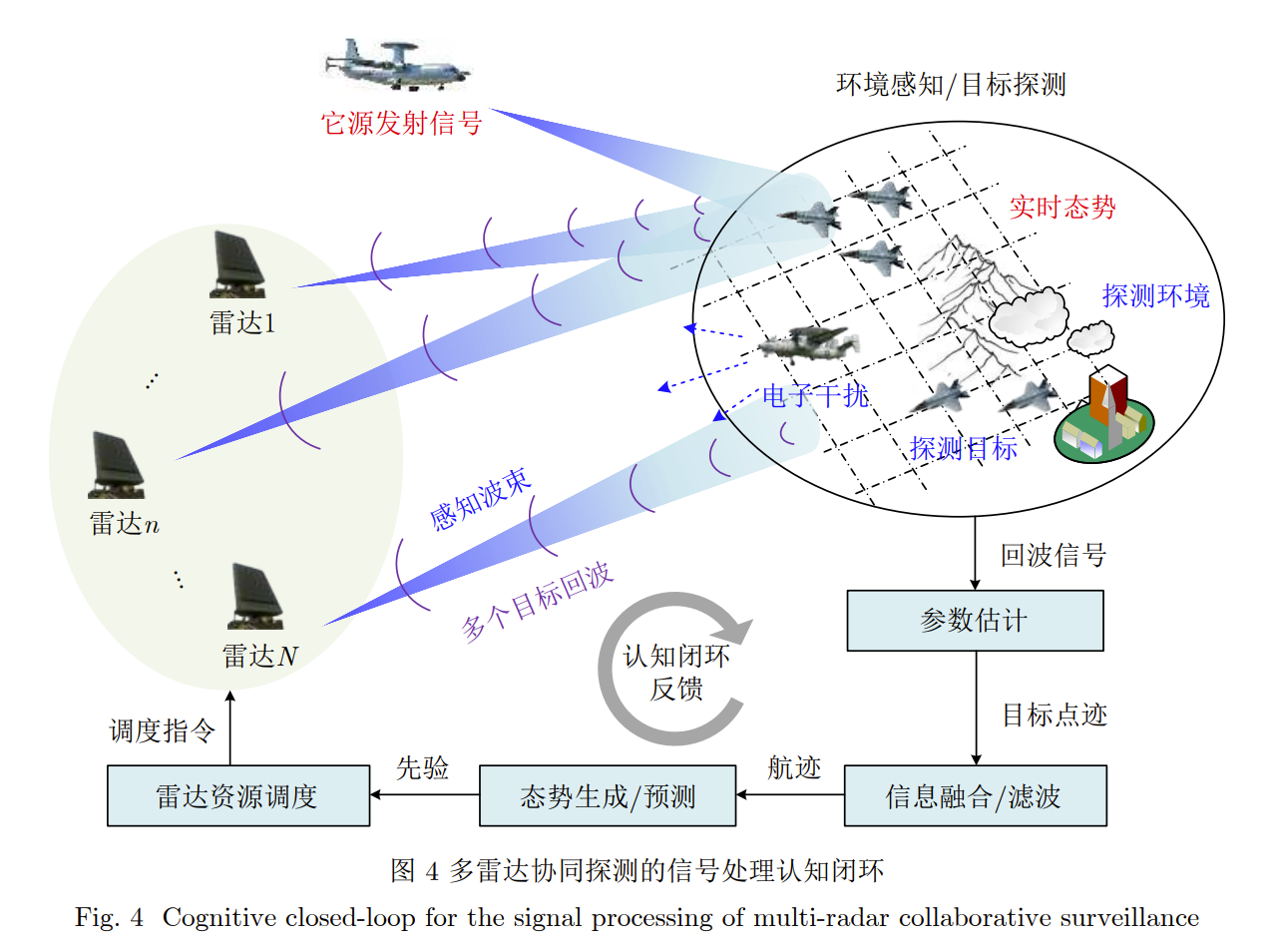
3.1 多雷达协同探测的信号处理认知闭环
-
多雷达协同探测采用闭环的信号处理机制
- 与开环的组网雷达不同,采用认知闭环
- 目的是提升系统的环境适应性和探测能力
-
认知闭环的流程
- 感知:获取探测环境信息
- 反馈:将信息反馈用于处理
- 分析:分析环境信息
- 决策:根据环境调整系统参数
- 再到感知, 形成闭环
-
具体流程
-
1 态势与环境的参数化输入 :时刻k, 预测的态势信息 x k ∣ k − 1 \boldsymbol{x}_{k \mid k-1} xk∣k−1,如特定目标的位置/速度/角度等参数的预测值
-
2 具体探测任务及其性能评价指标建模 : Ξ = ℑ ( Θ k ∣ x k ∣ k − 1 ) \Xi=\Im\left(\boldsymbol{\Theta}_k \mid \boldsymbol{x}_{k \mid k-1}\right) Ξ=ℑ(Θk∣xk∣k−1)
✅ x k ∣ k − 1 \boldsymbol{x}_{k \mid k-1} xk∣k−1 态势信息
✅ Θ k \boldsymbol{\Theta}_k Θk, 雷达系统收发资源,如雷达跟踪波束分配、波束驻留时间、发射功率等
✅ Ξ \Xi Ξ,探测任务性能评价指标,如探测概率、误报概率、跟踪精度等
-
3 资源调度优化模型 : min Θ k f ( ⋅ ) s.t { Θ min ≤ Θ k ≤ Θ max I ( Θ k ∣ x k ∣ k − 1 ) ≤ η k \begin{aligned} & \min _{\boldsymbol{\Theta}_k} f(\cdot) \\ & \operatorname{s.t}\left\{\begin{array}{l}\boldsymbol{\Theta}_{\min } \leq \boldsymbol{\Theta}_k \leq \boldsymbol{\Theta}_{\max } \\ \mathfrak{I}\left(\boldsymbol{\Theta}_k \mid \boldsymbol{x}_{k \mid k-1}\right) \leq \eta_k\end{array}\right.\end{aligned} Θkminf(⋅)s.t{Θmin≤Θk≤ΘmaxI(Θk∣xk∣k−1)≤ηk
-
4 资源调度与信号处理 , Θ k ≜ Θ k o p t \boldsymbol{\Theta}_k \triangleq \boldsymbol{\Theta}_k^{\mathrm{opt}}
-