1. 一些观点:
(1)我曾经认为不能复现的论文都是垃圾。我现在看到能够量产的论文之后发现,论文的复现实属难得,即使给你代码,反复钻研,一个月之久才敢说略微看懂,所以论文的复现实在是可遇不可求,基于各种原因,大家都不会把辛苦钻研的东西放出来。
(2)我曾经以为,读论文是学技术最慢的方式,因为充斥着各种”假“、晦涩。我现在认为读论文是学技术最快的方式,你可以轻而易举的了解到思路、方法、技术手段、来源。
2.
对于传统车辆工程的学生来说,代码能力差、公式推导能力不强。想要做出高层次论文实属不易,(1)死磕理论,如控制理论,往往死的很惨(2)广纳百川、推陈出新、广泛结合。
对于一个硕士来说,短短三年,如何结合工作和论文,我认为下述论文是一个典范。每一个论文都有它的背景,不要妄想去复现它,而要试图去理解他,因为每个人的导师、课题组、实习经历、直系师兄、科学训练情况天差地别,所以不想要复现,想的如何做出自己的论文,结合看的资料、手头有的资源。
”不要妄想去复现,不要不想去复现“。balance
3. 一篇好论文
3.1 绪论

前车历史轨迹构造参考路径,图森采用的是这种方法。
典型的dp,lattice做法。

横向和纵向功能

课题组资源和实习经历的展示,rosbag,资源一般的学生接触不到。
传统做法,没啥好说的。
老王
3.2 研究背景
一些全局路径规划的参考文献
参考文献【29】
参考文献【32】
参考文献【38】

参考【35】
参考【37】

参考【44】
参考【46】
李升波、李永福、边有刚的论文大多为真、,但抽象
参考【54】
李正磊可以复现

stanely算法。
3.3 创新点
可以看出,研究广,但不追求理论


第三章可以看看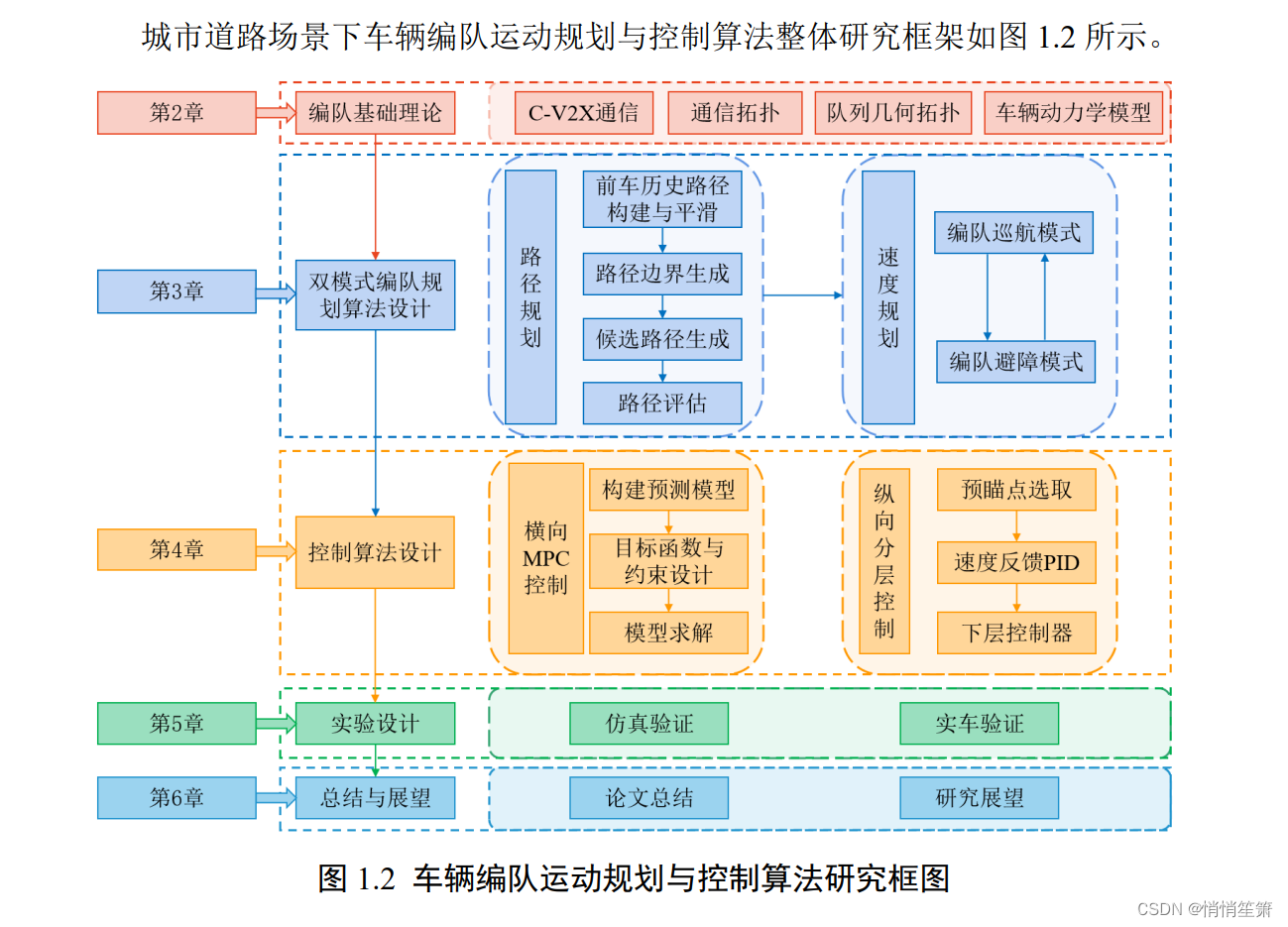
4 第二章
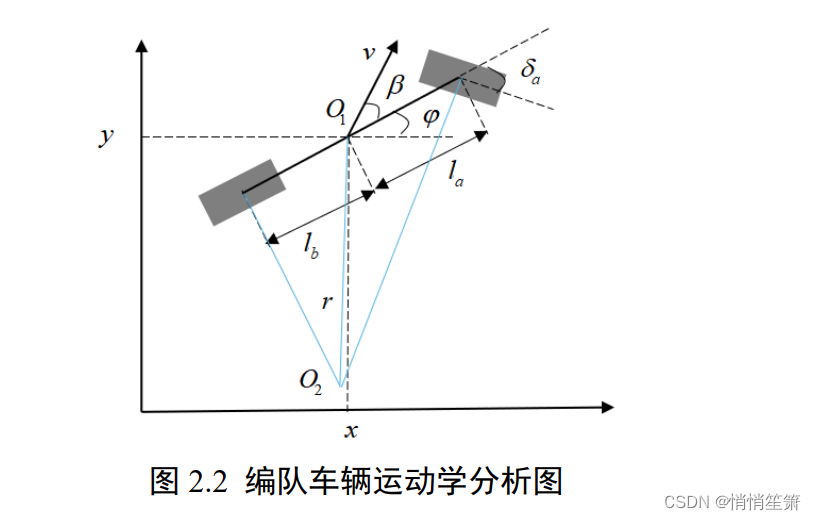
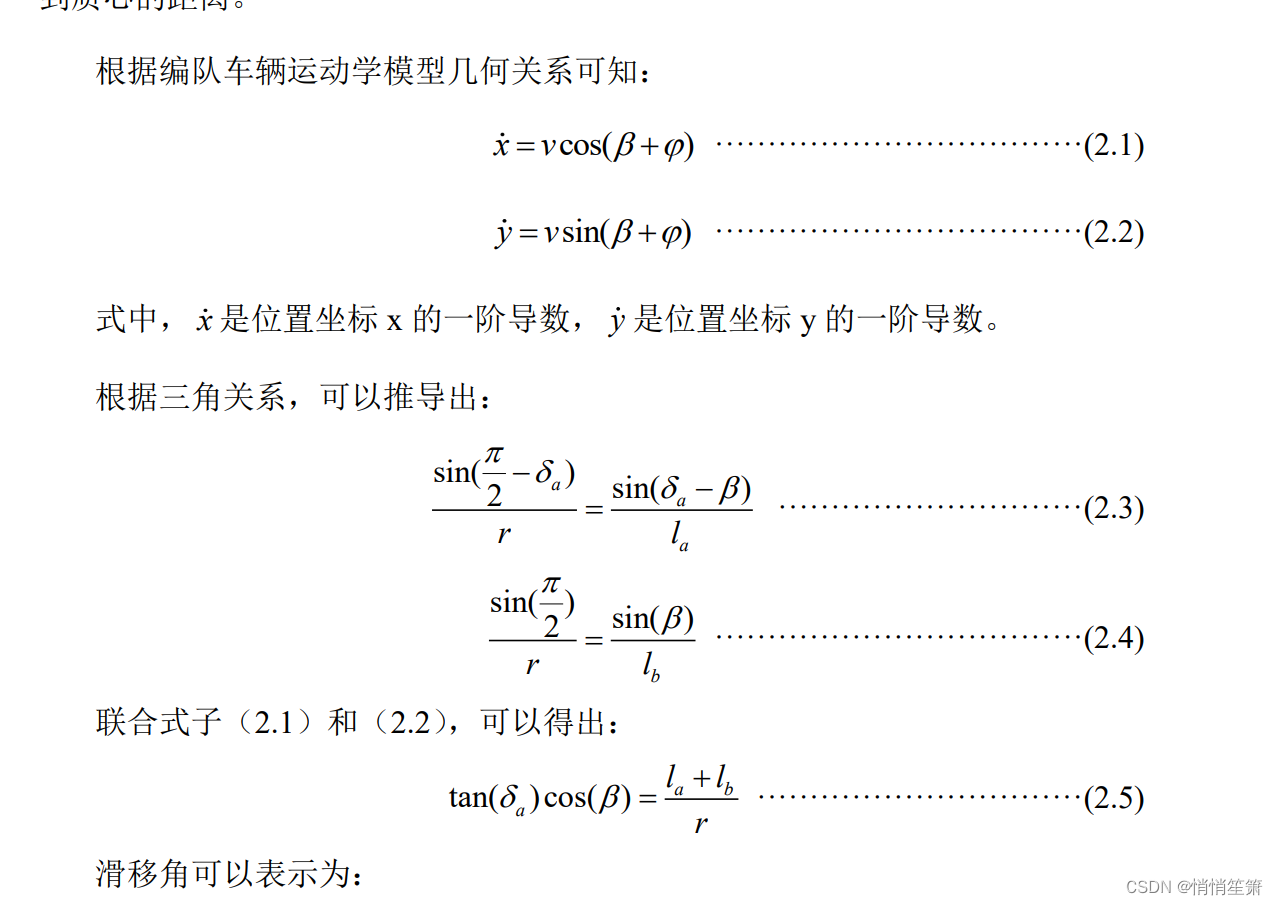

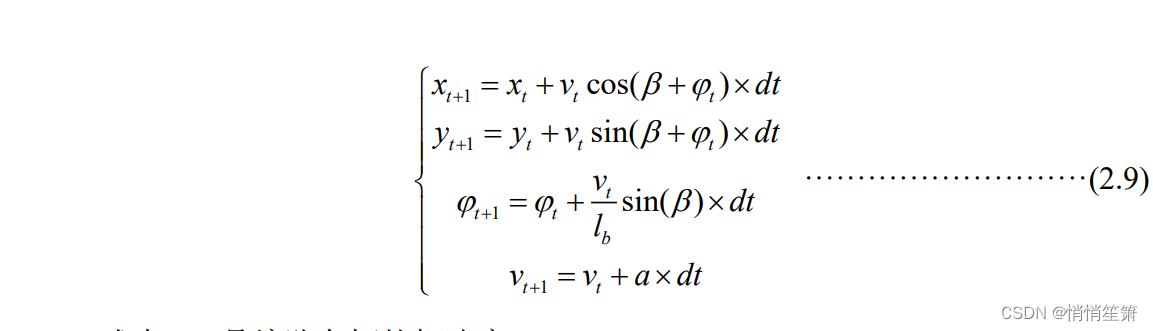
公式应该是对的,很简单。
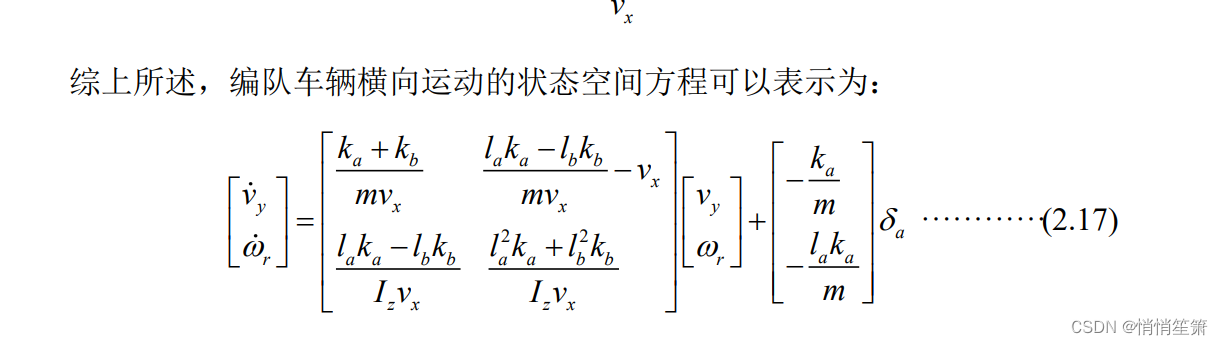
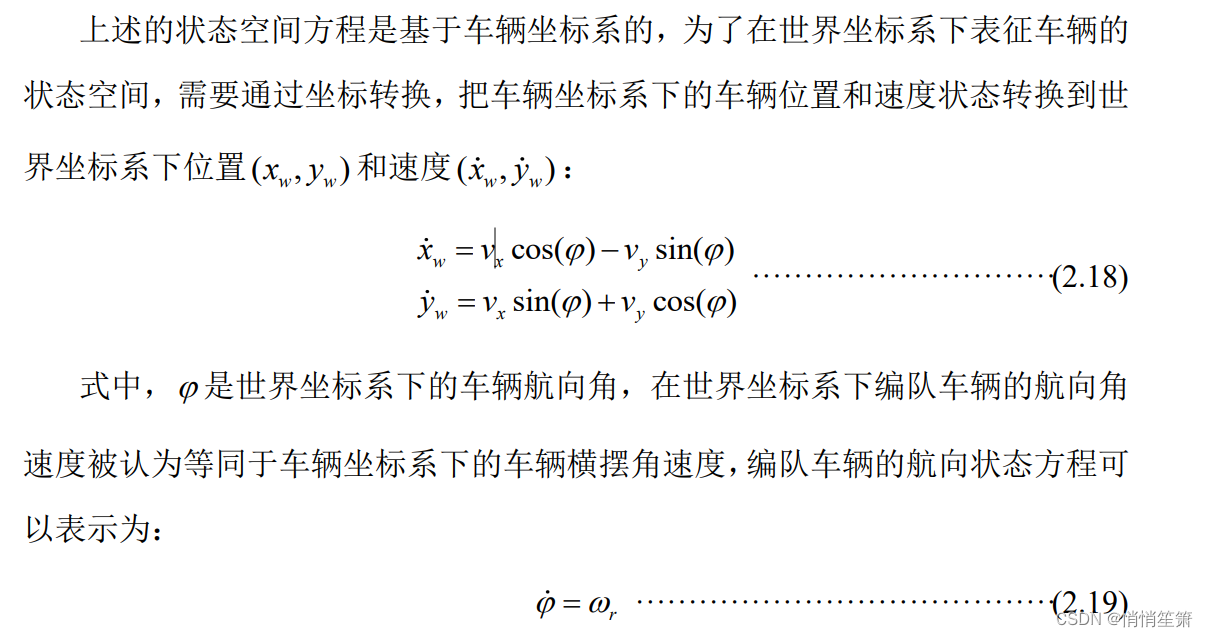
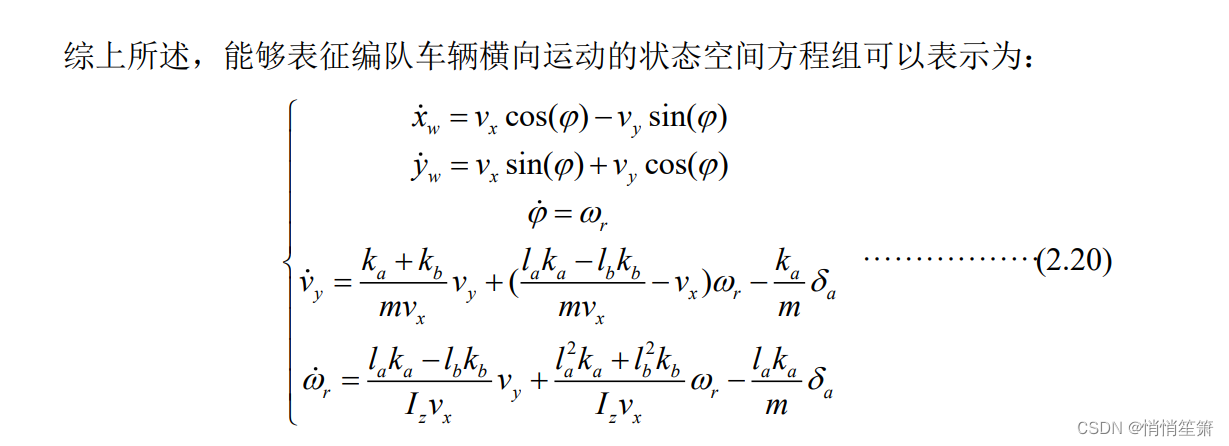
车辆坐标系-世界坐标系
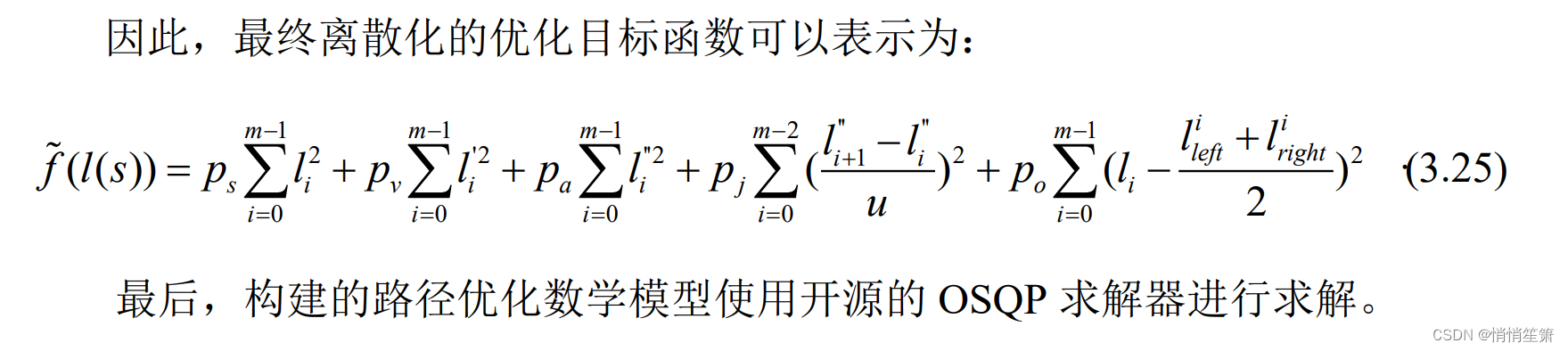
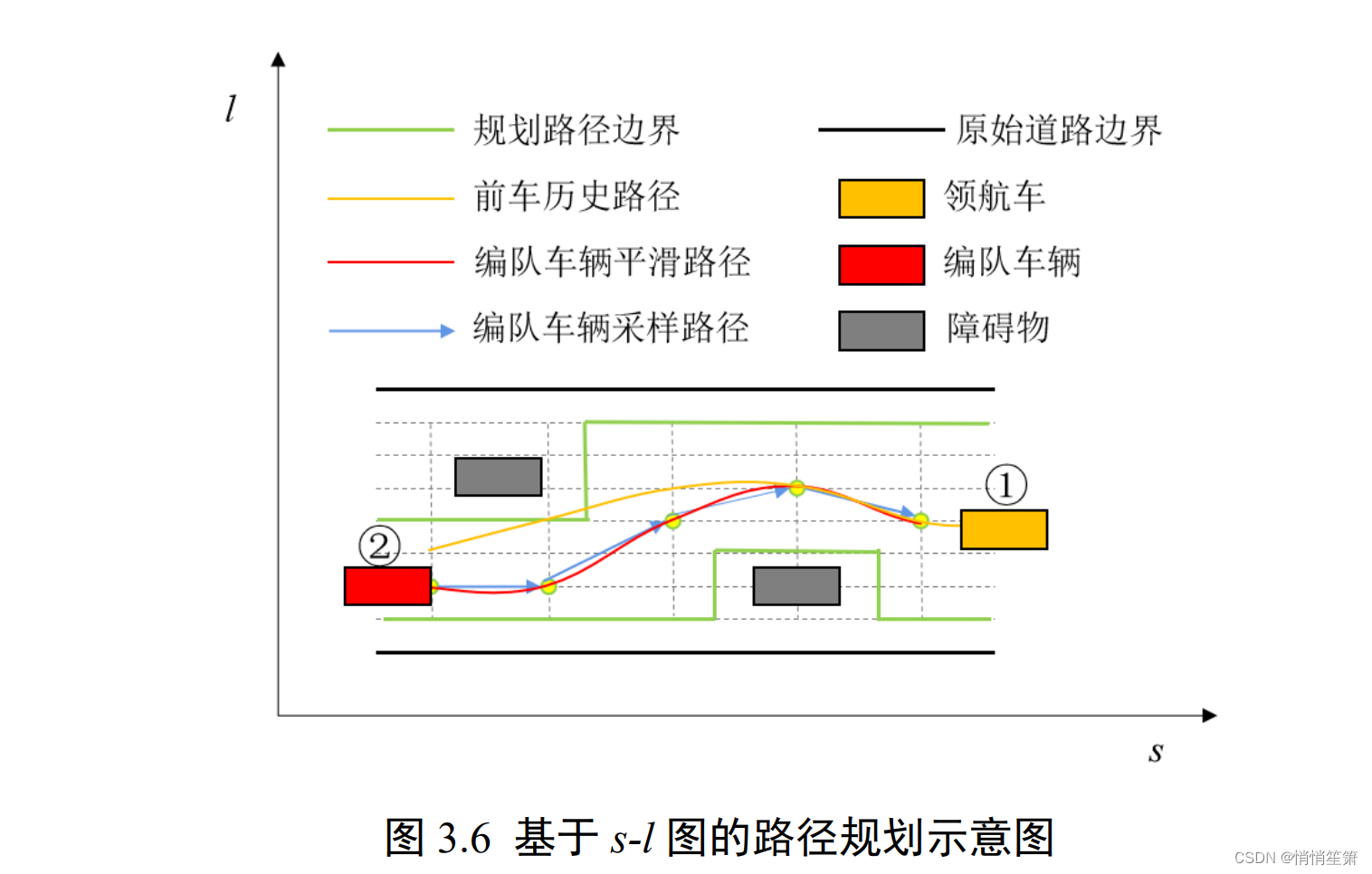
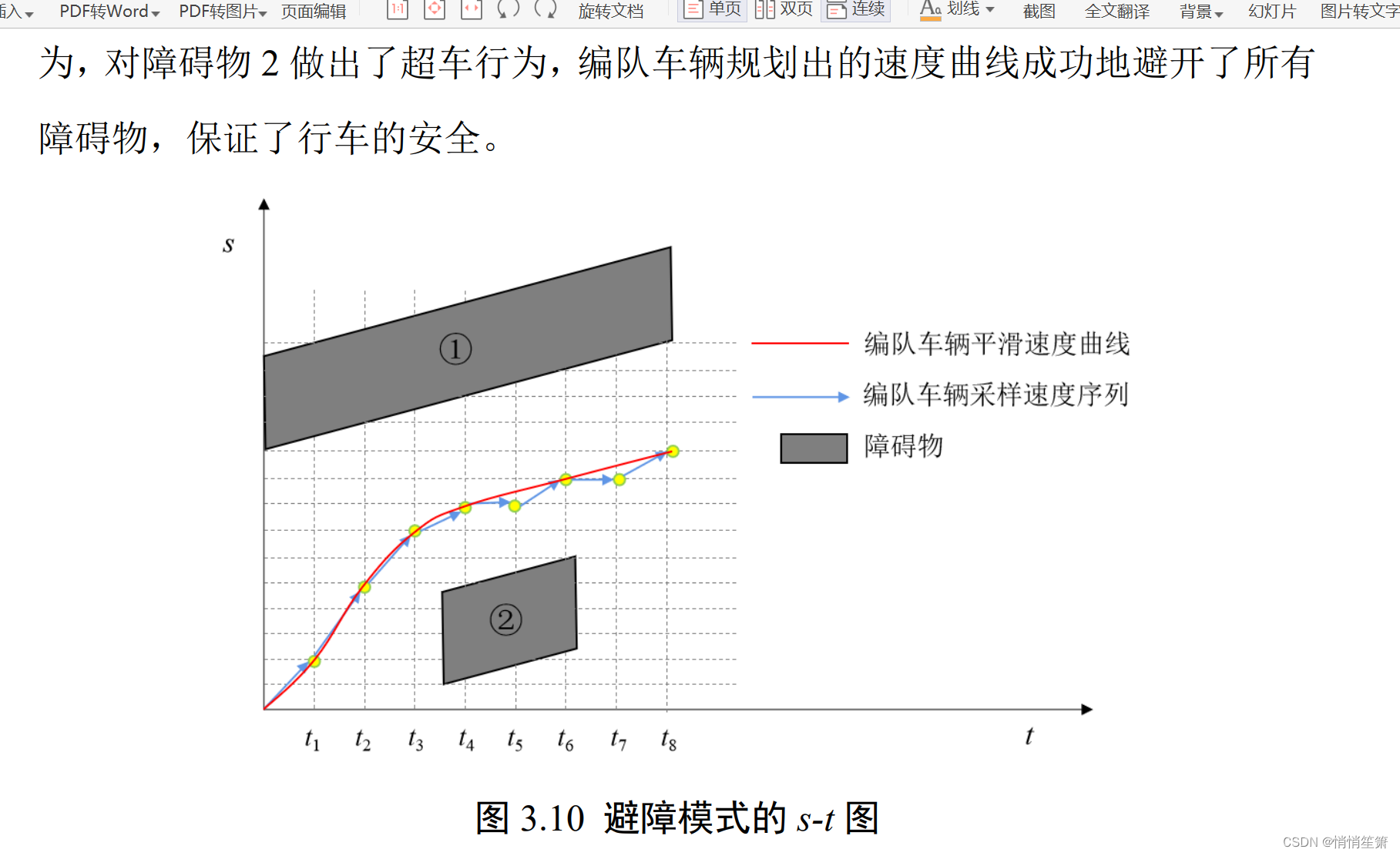
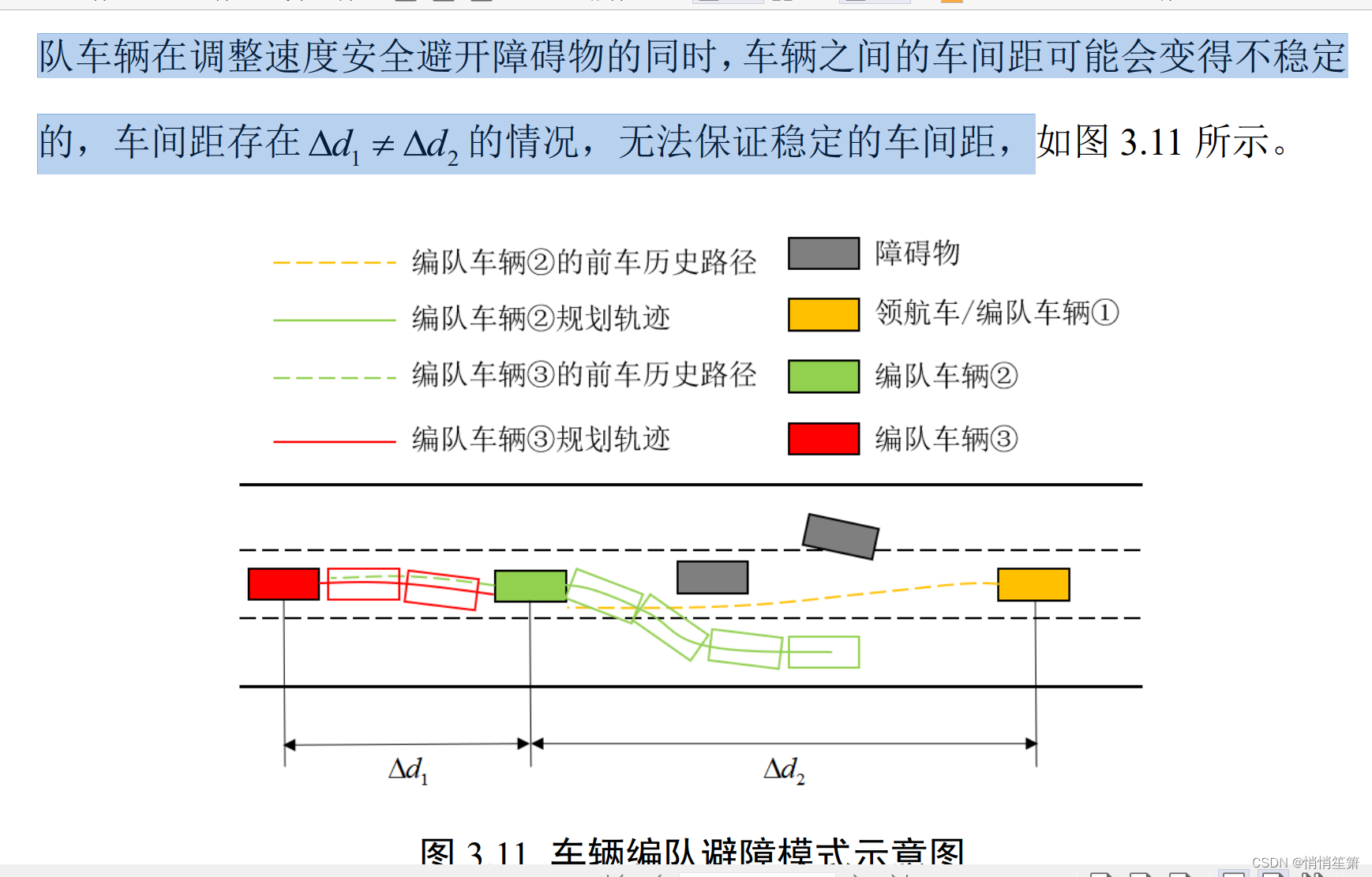
5.第三章
双模式:巡航+避障
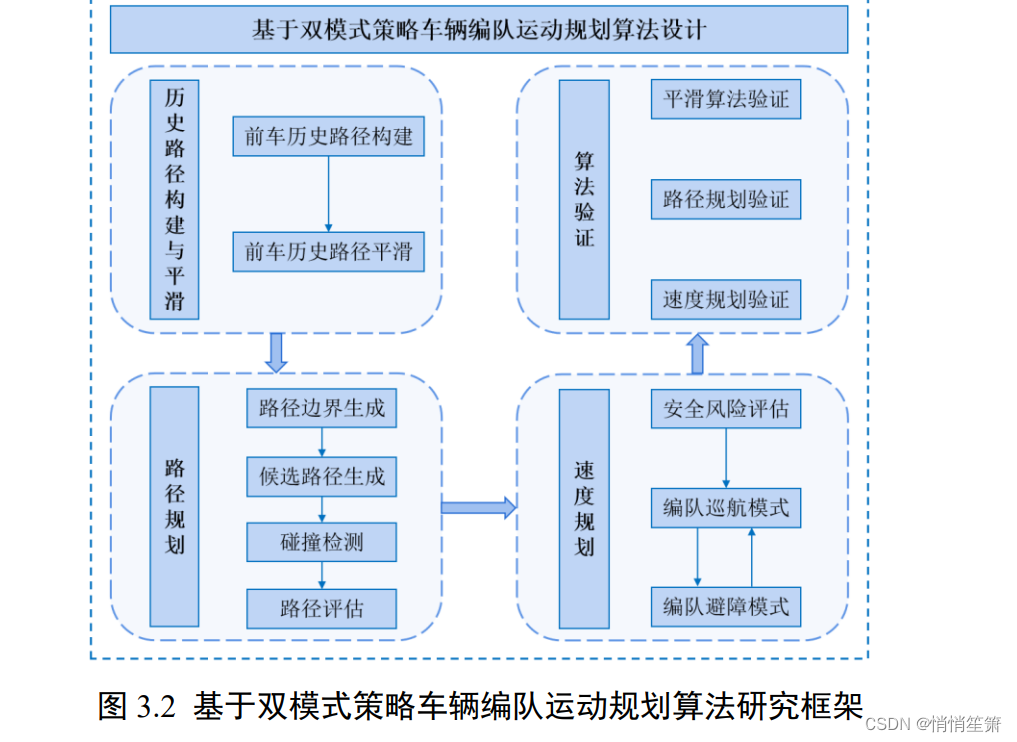
笛卡尔


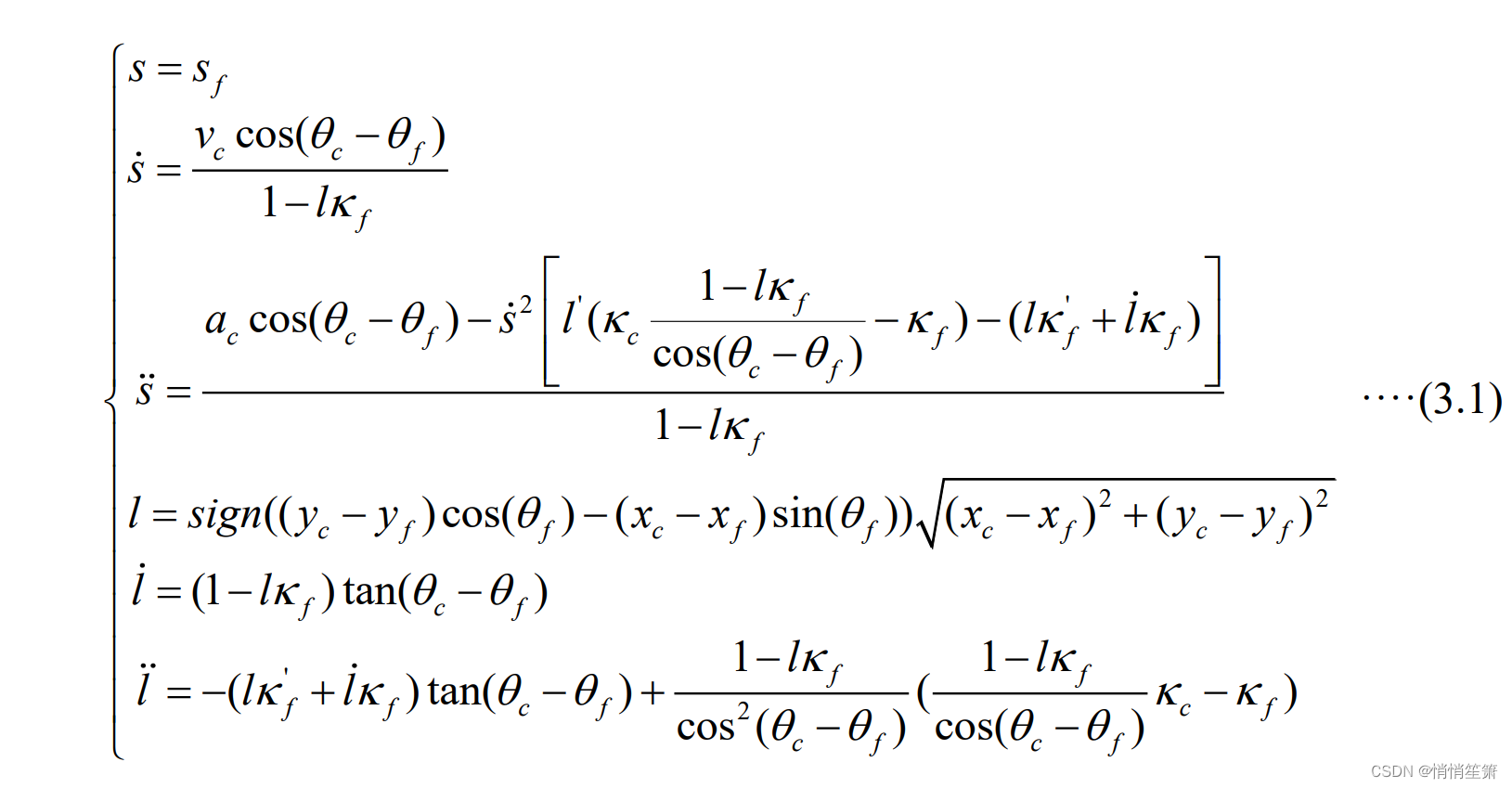

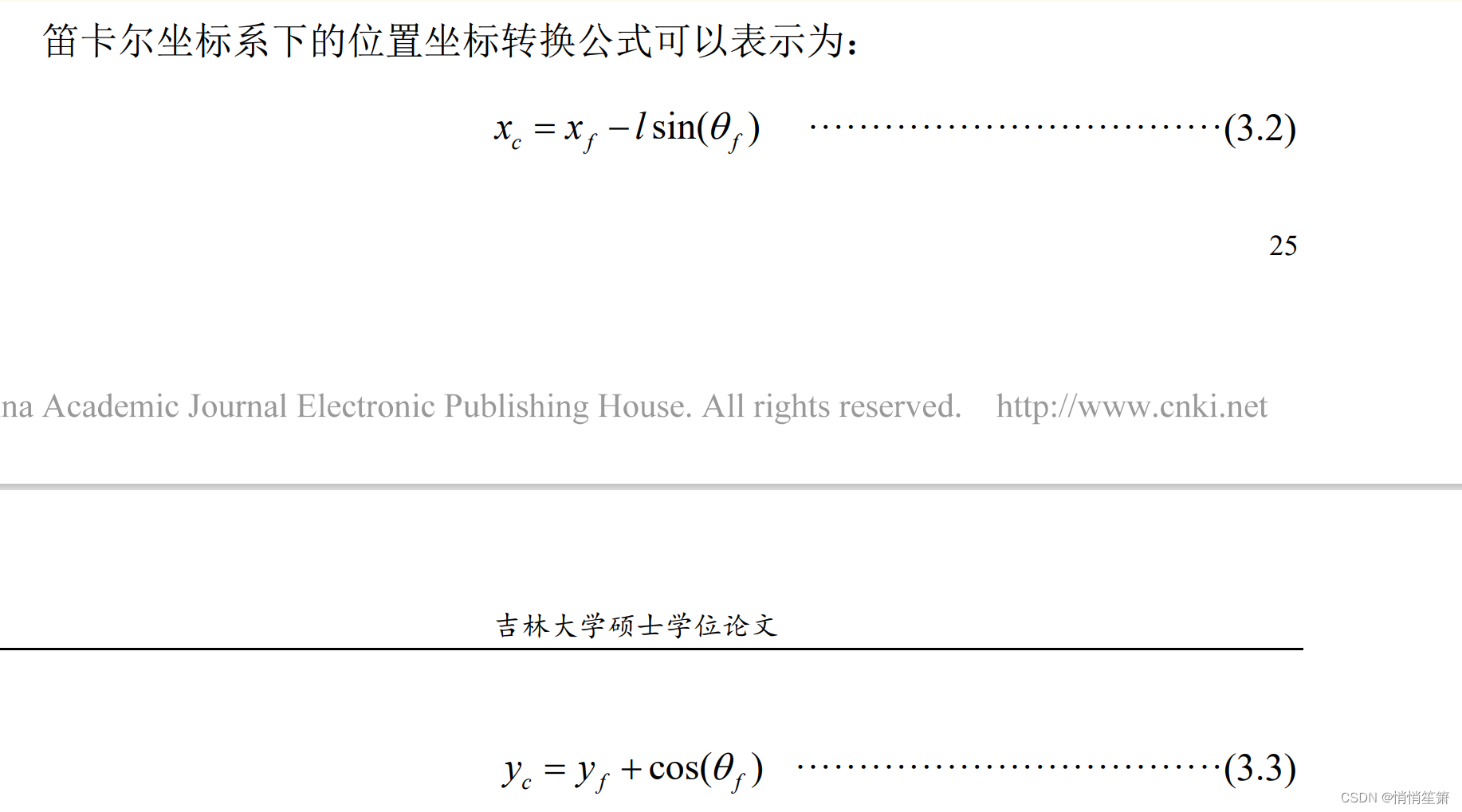
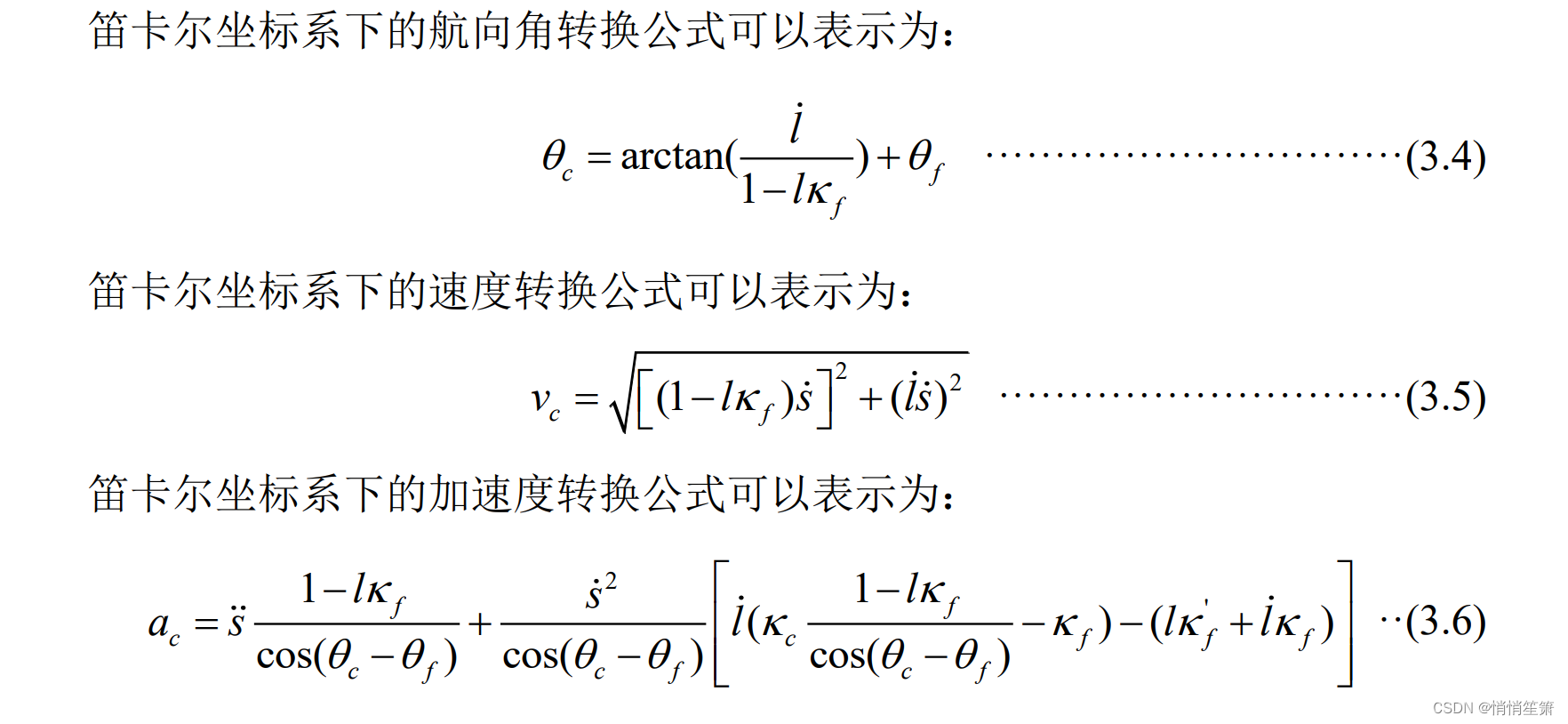
上边这一部分见老王。
5.1 前车历史路径构建于平滑
不可以实时,作者应该做过一定实车试验或者看过大公司文档
似曾相识

没啥好说的,见老王;
参考文献【73】
跟或不跟???创新点,谁想做,哈哈哈,细分场景,还可以继续做
对apollo很熟悉呀,貌似在企业实习过。好好学,面试用

这部分,我不会,学习一下。



这工程化经验,牛呀。



这一部分做的过于简陋了。危险不危险不能只靠距离,最起码弄个TTC吧

很简单的一个东西




resim
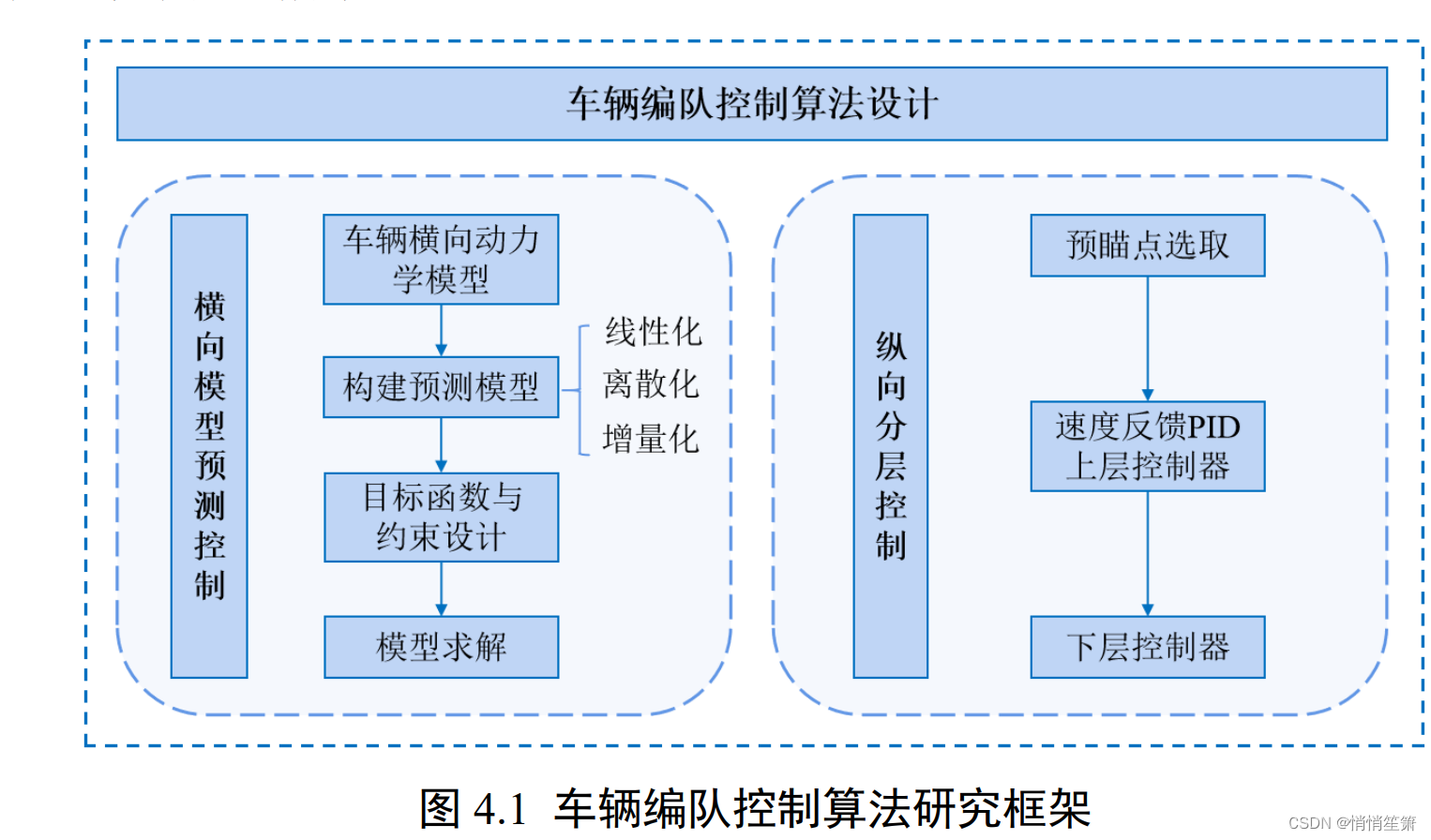
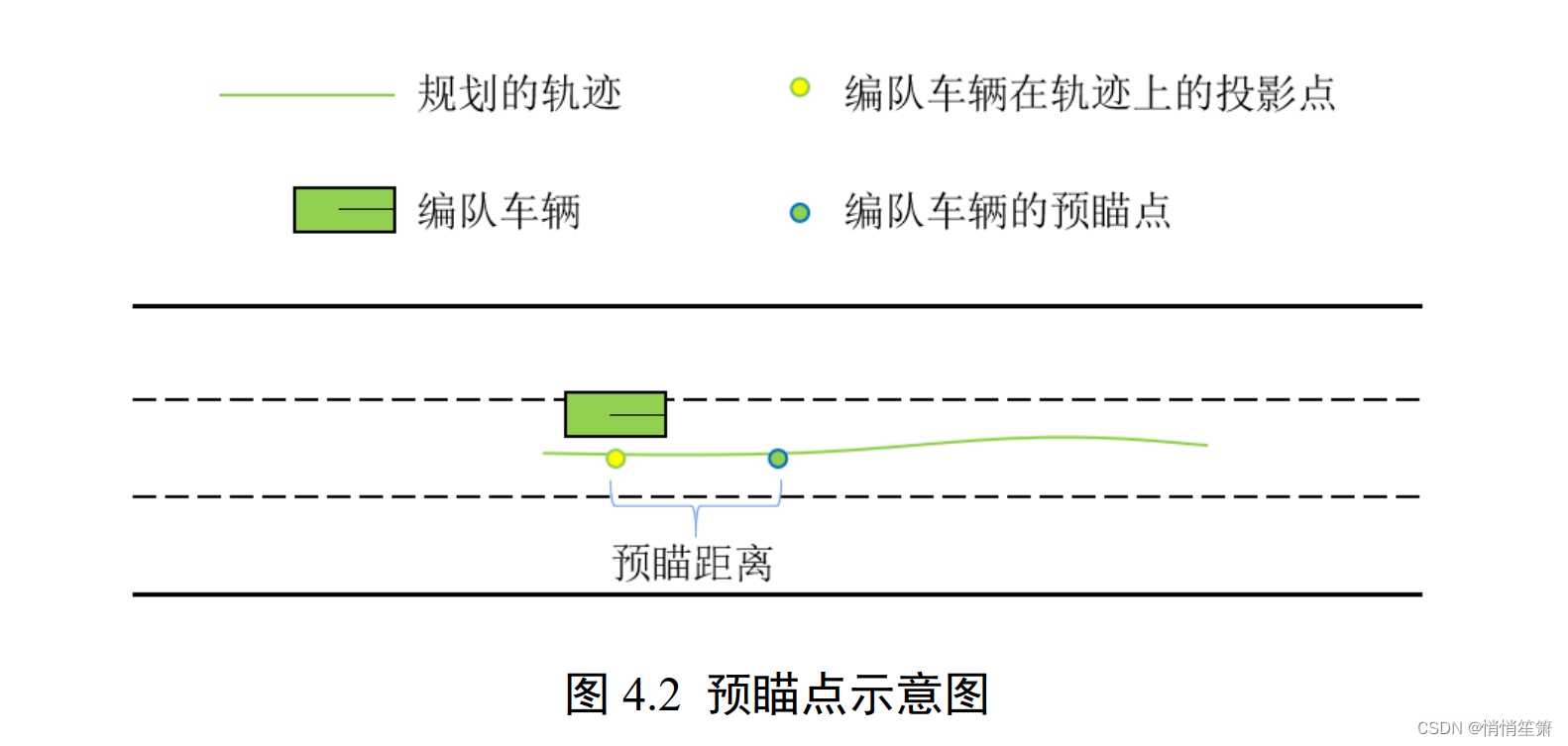
6.第四章
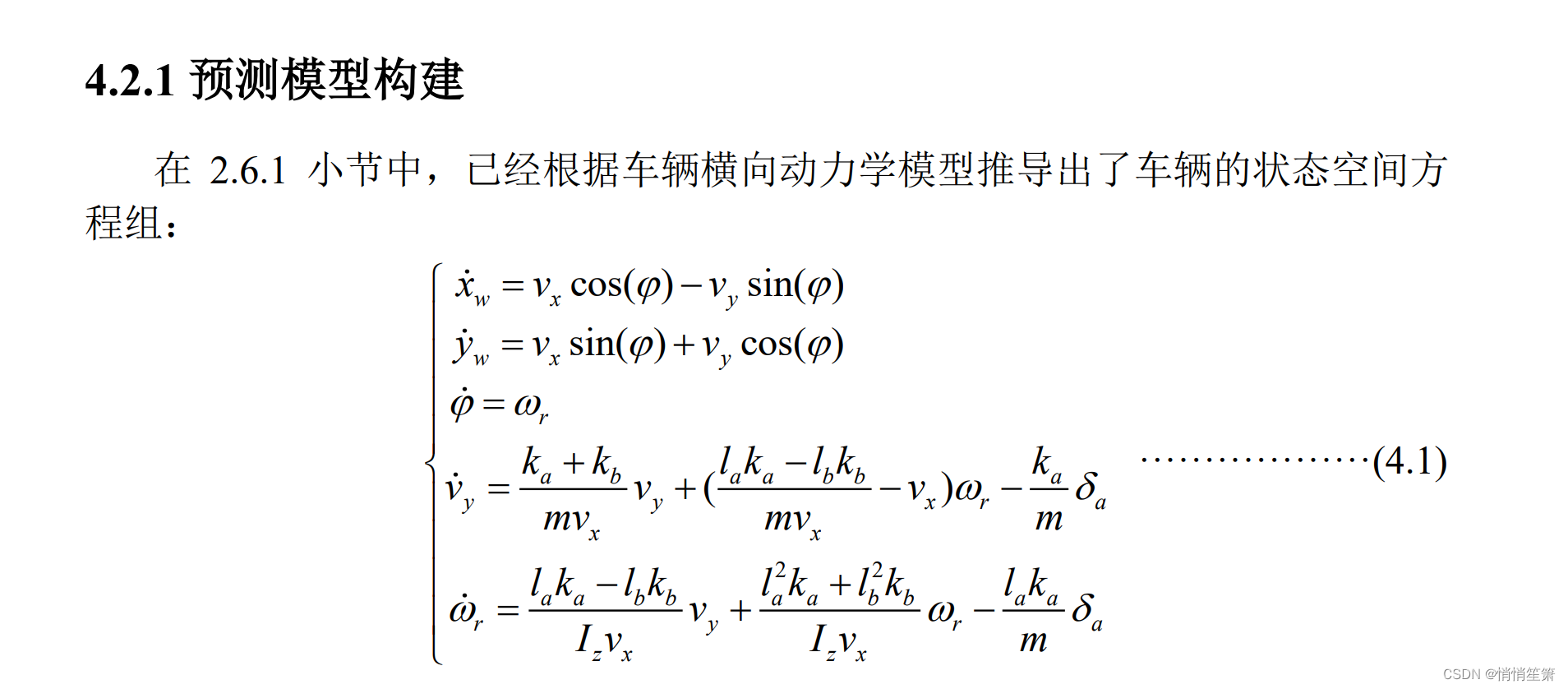




考虑了执行器的实延补偿
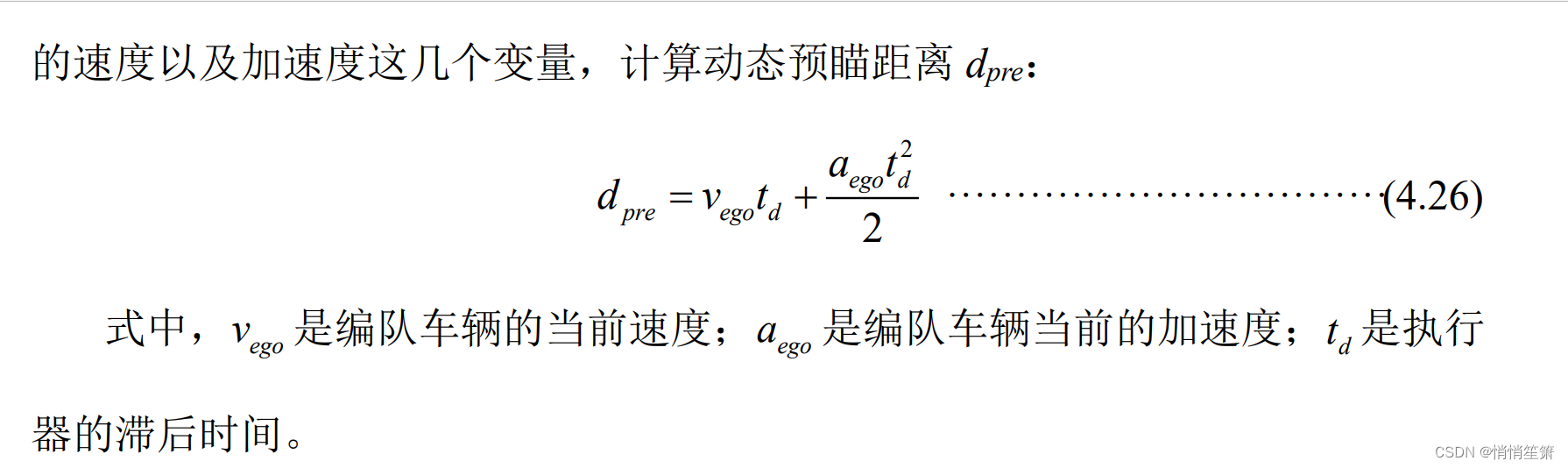

不光学生,主机厂也只知道这些参数。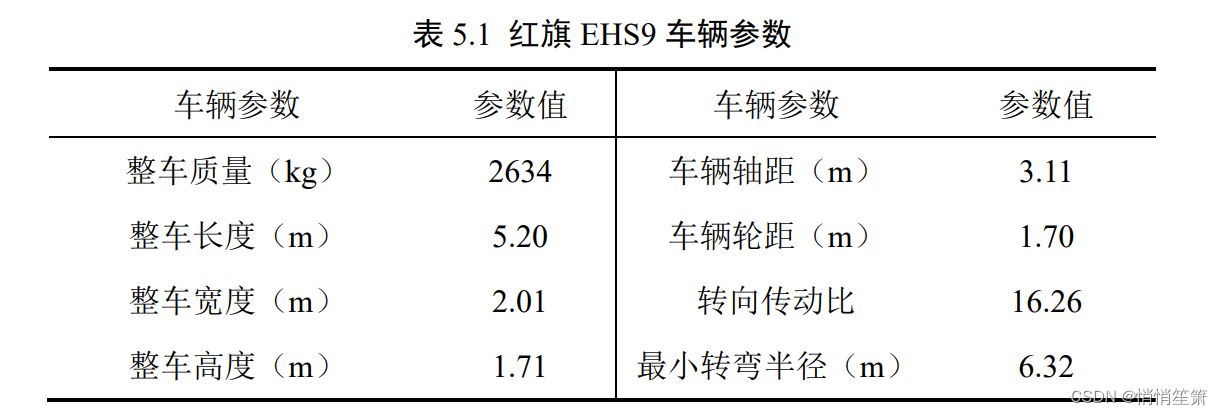

熟悉