ROS 2官方文档(基于humble版本)学习笔记(二)
- 理解节点(node)
- ros2 run
- ros2 node list
- 重映射(remap)
- ros2 node info
- 理解话题(topic)
- rqt_graph
- ros2 topic list
- ros2 topic echo
- ros2 topic info
- ros2 interface show
- ros2 topic pub
- ros2 topic hz
- Clean up
今天继续总结CLI 工具章的学习
理解节点(node)
ROS 2图是一个ROS 2元件同时处理数据的网络,如果将它们全部映射并可视化它们,则包括所有可执行文件以及它们之间的连接。
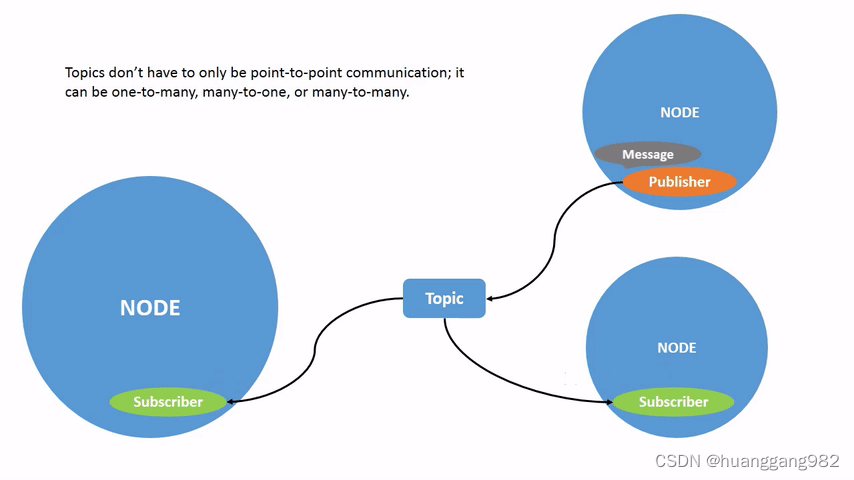
ROS中的每个节点(node)都应该只为了单个的、模块化的目的而设计的,例如控制车轮电动机或从激光测距仪发布传感器数据。每个节点都可以通过主题(topic),服务(service),动作(action)或参数(parameters)从其他节点发送和接收数据。在ROS 2中,一个可执行程序(c++或python程序)可以包含一个或多个节点(node)。
ros2 run
此命令启动一个包中的可执行程序:
ros2 run <package_name> <executable_name>
ros2 node list
此命令展示所有运行中的节点的名字。常用来查找你想要交互或跟踪的节点。
ros2 node list
重映射(remap)
此参数用来重新定义默认的节点属性(比如节点名,话题名,服务名)为用户指定的值。
ros2 node info
此命令用于获取节点更多信息。通常包括订阅消息者们(subscriber),发布消息者(publiser),服务(service)和动作(action)。
ros2 node info <node_name>
/turtlesim节点信息如下:
/turtlesimSubscribers:/parameter_events: rcl_interfaces/msg/ParameterEvent/turtle1/cmd_vel: geometry_msgs/msg/TwistPublishers:/parameter_events: rcl_interfaces/msg/ParameterEvent/rosout: rcl_interfaces/msg/Log/turtle1/color_sensor: turtlesim/msg/Color/turtle1/pose: turtlesim/msg/PoseService Servers:/clear: std_srvs/srv/Empty/kill: turtlesim/srv/Kill/reset: std_srvs/srv/Empty/spawn: turtlesim/srv/Spawn/turtle1/set_pen: turtlesim/srv/SetPen/turtle1/teleport_absolute: turtlesim/srv/TeleportAbsolute/turtle1/teleport_relative: turtlesim/srv/TeleportRelative/turtlesim/describe_parameters: rcl_interfaces/srv/DescribeParameters/turtlesim/get_parameter_types: rcl_interfaces/srv/GetParameterTypes/turtlesim/get_parameters: rcl_interfaces/srv/GetParameters/turtlesim/list_parameters: rcl_interfaces/srv/ListParameters/turtlesim/set_parameters: rcl_interfaces/srv/SetParameters/turtlesim/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomicallyService Clients:Action Servers:/turtle1/rotate_absolute: turtlesim/action/RotateAbsoluteAction Clients:/teleop_turtle节点信息如下:
/teleop_turtleSubscribers:/parameter_events: rcl_interfaces/msg/ParameterEventPublishers:/parameter_events: rcl_interfaces/msg/ParameterEvent/rosout: rcl_interfaces/msg/Log/turtle1/cmd_vel: geometry_msgs/msg/TwistService Servers:/teleop_turtle/describe_parameters: rcl_interfaces/srv/DescribeParameters/teleop_turtle/get_parameter_types: rcl_interfaces/srv/GetParameterTypes/teleop_turtle/get_parameters: rcl_interfaces/srv/GetParameters/teleop_turtle/list_parameters: rcl_interfaces/srv/ListParameters/teleop_turtle/set_parameters: rcl_interfaces/srv/SetParameters/teleop_turtle/set_parameters_atomically: rcl_interfaces/srv/SetParametersAtomicallyService Clients:Action Servers:Action Clients:/turtle1/rotate_absolute: turtlesim/action/RotateAbsolute理解话题(topic)
话题是ROS图的一个至关重要的元素,扮演着节点间用于交换信息的总线的角色。
rqt_graph
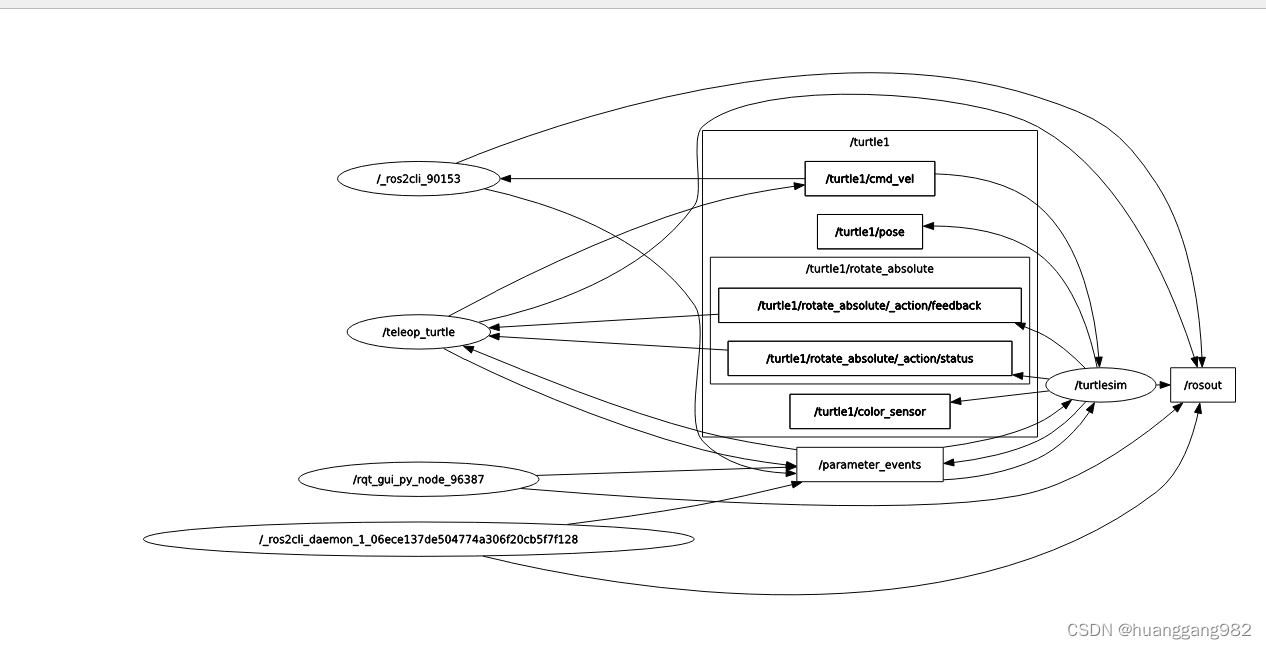
在一个终端执行rqt_graph或者执行rqt后选择菜单Plugins > Introspection > Node Graph
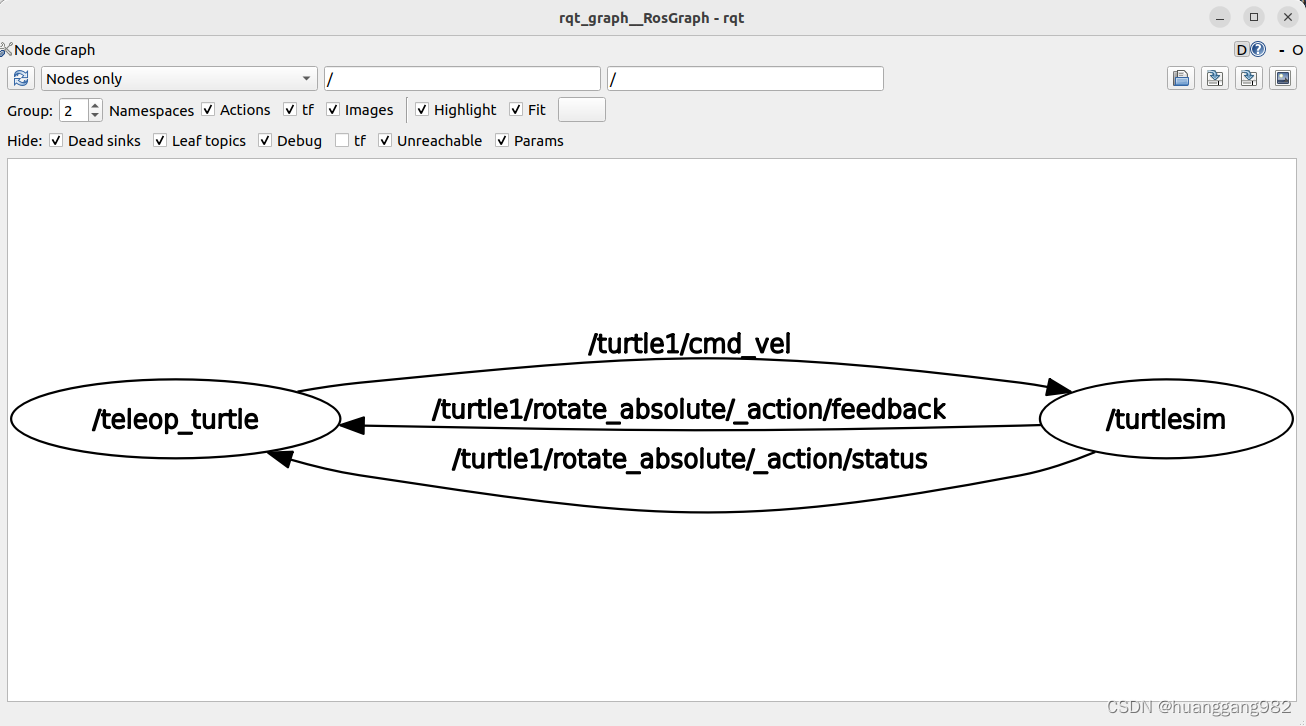
上图描述了/turtlesim节点和/teleop_turtle节点如何在一个话题上通信的。/teleop_turtle节点发布数据到/turtle1/cmd_vel话题,/turtlesim节点订阅这个话题来接收数据。
ros2 topic list
此命令用于显示当前活动的所有话题。加上-t参数会在[]中显示话题的类型。
hugo@vm-ubuntu1:~$ ros2 topic list -t
/parameter_events [rcl_interfaces/msg/ParameterEvent]
/rosout [rcl_interfaces/msg/Log]
/turtle1/cmd_vel [geometry_msgs/msg/Twist]
/turtle1/color_sensor [turtlesim/msg/Color]
/turtle1/pose [turtlesim/msg/Pose]ros2 topic echo
此命令用来查看正在被发布的话题数据。
如下图所示,刚开始没有输出任何数据,他在等待/teleop_turtle发布信息。在运行turtle_teleop_key的终端按键控制乌龟运动,这时echo的终端就会输出信息了。
ros2 topic echo <topic_name>

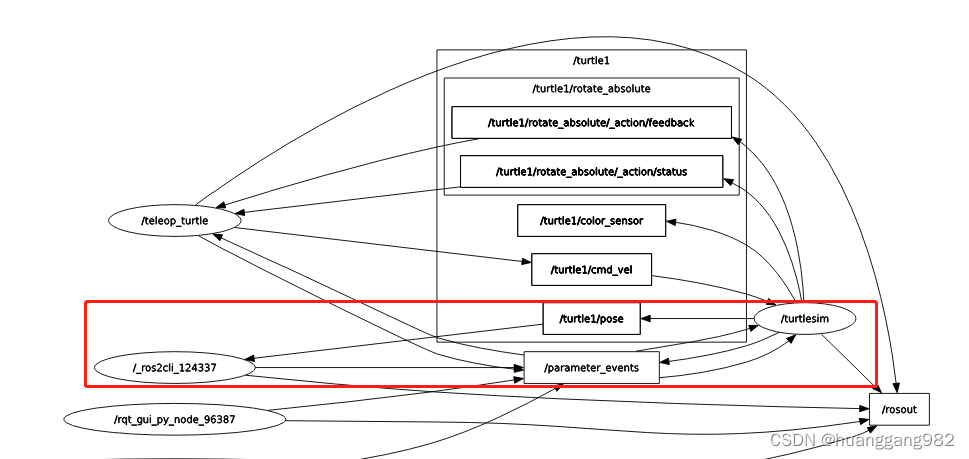
在rqt_graph界面去掉工具栏中Hide:Debug前面的勾,就可以看到以/_ros2cli_开头的一个节点就是刚才执行的echo命令。
ros2 topic info
此命令也可以显示话题的类型、订阅者数量和发布者数量。
hugo@vm-ubuntu1:~$ ros2 topic info /turtle1/cmd_vel
Type: geometry_msgs/msg/Twist
Publisher count: 1
Subscription count: 2ros2 interface show
此命令用于查看消息类型的具体定义。
hugo@vm-ubuntu1:~$ ros2 interface show geometry_msgs/msg/Twist
# This expresses velocity in free space broken into its linear and angular parts.Vector3 linearfloat64 xfloat64 yfloat64 z
Vector3 angularfloat64 xfloat64 yfloat64 zros2 topic pub
此命令用于直接发布一个话题消息。
–once 是可选参数,意思是”发布一个消息然后退出“。
ros2 topic pub <topic_name> <msg_type> '<args>'

–rate 1参数表示以1Hz的稳定频率发布命令。效果如下图:

可以使用如下命令查看乌龟的位置信息,可以看出是由turtlesim发布,echo命令订阅的。
ros2 topic echo /turtle1/pose
ros2 topic hz
此命令用来查看正在发布数据的频率。
ros2 topic hz /turtle1/pose
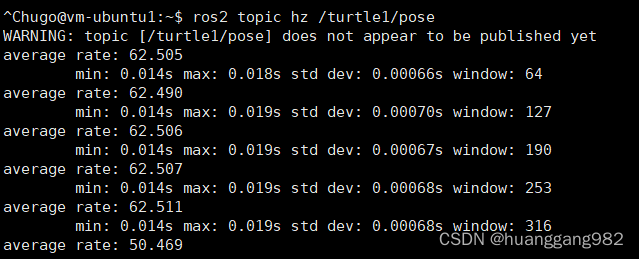
可以在一个终端执行刚才的发布/turtle1/cmd_vel,在另一个终端打印发布频率。

Clean up
在每个命令行窗口执行Ctrl+C终结他们。