视频地址:大模型时代下做科研的四个思路
相关大模型
CV: ViT(22B) , ViT-G(2B) from google
多模态:ViT-E(4B) from google
NLP:LLaMA(70B,130B,330B,651B) from Meta
提问:在模型越来越大的时代背景下,如何利用有限的资源做出一些科研工作。
回答:四个方向
1、Efficient(PEFT)
提升训练效率,这里以PEFT(parameter efficient fine tuning)为例
(做效率提升的(哪里慢提升哪里的速度,哪里heavy使其轻量级))
2、Existing stuff(pretrained model)、New directions
使用别人的预训练模型,新的研究方向(做新方向,避免撞车,竞争,刷榜)
3、plug-and-play
做一些即插即用的模块,例如模型的模块、目标函数、新损失函数、数据增强方法等等。(可以在不同领域应用)
4、Dataset,evaluation and survey
构建数据集、发表分析为主的文章或者综述论文。
大模型时代下做科研的四个思路
- 第一个方向:Efficient(PEFT)
- 1. AIM论文为例
- 2. PEFT的方法
- (1)adapter
- (2)prompt tuning
- 3. AIM模型设计
- 第二个方向:Existing stuff(pretrained model)
- 一些比较新的Topic
- 第三个方向:plug-and-play
- 第四个方向: Dataset,evaluation and survey
第一个方向:Efficient(PEFT)
1. AIM论文为例
通过论文AIM为例讲述如何进行PEFT,即在硬件资源有限时对大模型进行高效微调
论文地址:https://arxiv.org/abs/2302.03024
论文标题:AIM: Adapting Image Models for Efficient Video Action Recognition
标题翻译:调整图像模型以实现高效的视频动作识别
这篇论文是做视频动作识别,即视频理解的工作。
传统模型和论文改进的微调方法对比图:
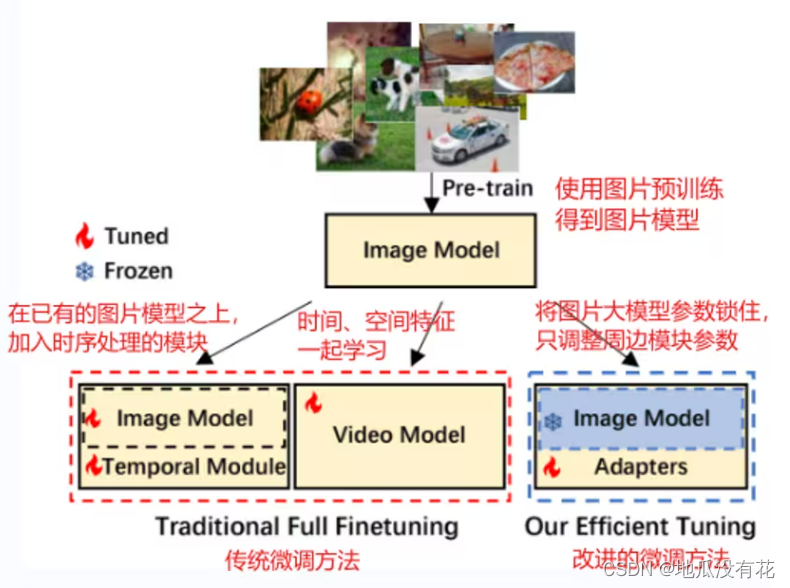
之前的做法:
- 在已有的模型之上,单独增加时序处理模块,比如
(1)在TSN中,先将视频劈成几段,然后将从这些视频中抽取出来的特征做一下加权平均。
(2)在Temporal Shift Module(TSM)中,做的就是把模型的特征在Channel维度上,进行来回的shift操作,从而去模拟时序建模。
(3)在最近的使用Transformer来做视频理解的工作里,像Time Transformer,就是先做Time Attention,再做Spatial Attention,也就是将Spatial 、Temporal分开来做。 - 将时间和空间的特征一起学,这里主要是3D网络,比如i3D,Transformer时代的Video Swing,就是把2D的这个Shifted Window变成3D的Shifted Window,总之,输入是3D的,模型也是3D的,是一个Joint Modeling的过程。
虽然之前的这些方法在效果是都非常的好,但是他们都有一个小小的问题,就是计算代价实在是太大,因为他们的模型,全都是需要Full Fine Tune的,就是整个模型的所有的参数都要拿下来,在这个视频数据集上去做Fine Tune,但是视频数据集的本身就比较大,数据的IO一般都有Bottleneck,然后模型本身也比较大,所以这个训练的Cost非常昂贵。
一般左边这种时间和空间分开的方法还好(一台8卡机需要3、4、5天完成一个模型的训练,但是若Bottleneck特别大的话就需要一周或者十天左右的时间),稍微轻量些。右边这种Joint的Video Model,比如大部分的3D网络或者Video Swing模型,他们的训练时间就非常感人了。但是这些模型还好,是因为他们利用了预训练的图像模型。所以,说白了,他们更多的还是在做一个Fine Tune。如果像视频领域,有些模型是从头开始训练(Train From Sketch),那这些模型就需要更长的时间了,比如MaskFit、Video MAE,这些最近的自监督的视频学习方法,他们的训练代价都是以周为计算单位的。一般情况下,想要复现他们的模型都很困难,更不要说是提出什么新模型且比他们的效果更好了。
这篇论文的研究动机来自于Clip,对比学习,虽然Clip作为一个图像模型,也能做视频动作识别的任务,且效果好的出奇。
思考:已经训练好的图像模型是否需要继续微调?
1、clip已经证明了即使ZeroShot(模型不变,直接在各个数据集上进行推理),它的效果也很好。即一个训练很好的图片模型从中提取视觉特征是有泛化性、有效的。
2、继续微调会导致灾难性遗忘。如果使用少量数据在大模型上微调,可能会直接过拟合,或者大模型的很多特征丢失。
结论:预训练的图像模型不需要继续微调。
因此,论文的做法是,尝试将模型参数锁住,在上面加一些时序处理模块、目标函数等修改周边的方式(即PEFT)让图片模型能够做视频理解的任务,不需要重新训练视频模型,省时省力。
接下来介绍两个比较普遍的PEFT的方法
2. PEFT的方法
(1)adapter
最早来自于这篇论文:
论文地址:https://arxiv.org/abs/1902.00751
论文标题:Parameter-Efficient Transfer Learning for NLP
标题翻译:用于NLP的参数高效转移学习
这篇论文是做NLP的。
注:最近,很多视觉和多模态这边使用的技术都是从NLP那边过来的,因为大家都用transformer做backbone,因此NLP这边的方法大概率都能迁移到视觉这边,比如这些parameter
efficient fine tuning的技术、in-context learning、instructor
GPT里的RLHF这些基于reinforcement learning的方法,都可以快速被运用到视觉里面。
Adapter层的结构,如下图右边所示:下采样FC层+非线性激活层+上采样FC层,加上残差连接。
Adapter layer就像一个即插即用的模块,可以插到transformer layer里的任何一个地方。
这里PEFT的方法是指,如下图左边所示,在Transformer中加入了两个adapter,分别是在attention和NLP后面,进行微调时,原来的Transformer的参数都是锁住的,只有adapter层的参数在学习。
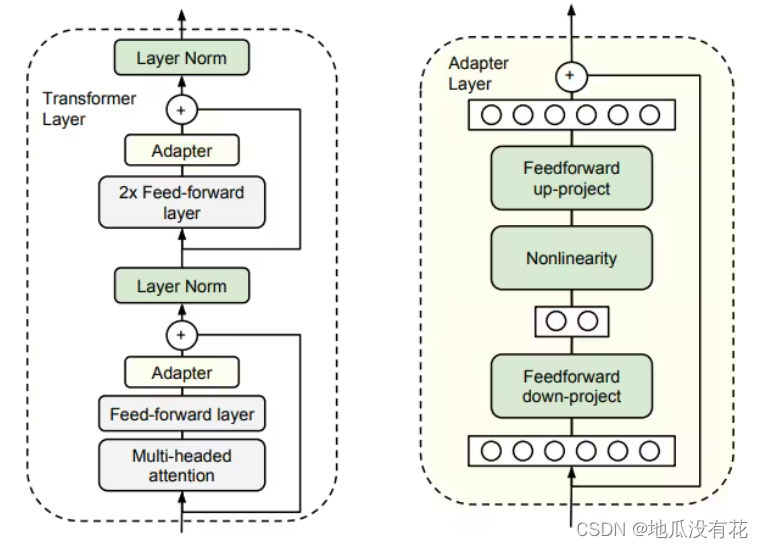
adapter层参数量和大模型相比非常少,例如在175B的GPT3中使用LoRa,需要训练的参数只要万分之一。因此训练成本大幅降低。
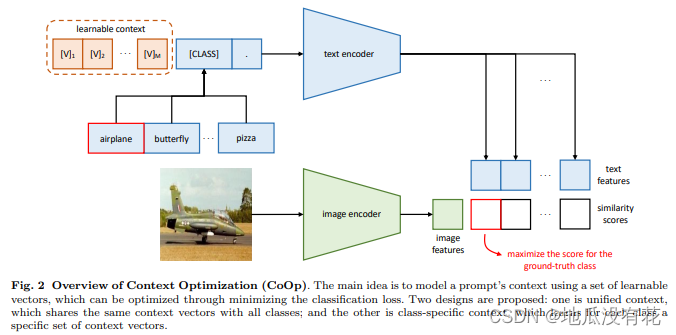
(2)prompt tuning
prompt tuning是指可以任意调整提示词,这样的调整对最后的性能会有很大的影响,能否得到想要的结果,取决于有没有选择一个好的提示词。例如下图所示,不同的提示词对准确率的影响很大。
论文地址:https://arxiv.org/abs/2109.01134
论文标题:Learning to Prompt for Vision-Language Models
标题翻译:用于视觉模型的提示学习

无论是在分类任务还是在图像生成的任务里,prompt tuning对最后的性能影响是非常非常巨大的,你最后能否得到你想要的结果,很大程度上取决于你有没有选择一个很好的Prompt。
Prompt分为两种:
Hard Prompt:人工设置的提示词,不能修改也无法学习。设置这些需要一定的先验知识,但我们并不会总有这样的先验知识。
Soft Prompt:将提示词设置为一个可学习的向量。如上图中的v1,v2,…,vm,这和DETR里的learnable query一样,都是一个可学习的向量。
在整个模型的训练过程中,整个模型是锁住不动的,只根据最后的loss去调整Prompt。最后,希望学到的Prompt能够泛化到各种各样的情形里去。
如下面的总览图所示 ,它跟clip模型之前在做推理的过程中画起来是一模一样的,上面是文本的分支,一个prompt进文本编码器得到很多文本特征,下面是图像进图像编码器得到一个图像特征。然后将图像特征和这些文本特征去做相似度,看哪个最高选哪个。这个模型和clip的区别是,一是图片分支是在训练的,二是文本端(text encoder)的输入不再是固定的,而是一个可以学习的learnable context,模型优化的是这个context部分,而不是模型本身。这样既可以节省很多计算量,也可以避免在下游任务时手动设置提示词。
上述是prompt tuning或者说是Soft Prompt的最简单、最基本的一个形式。
上述还是在文本端的prompt,实际上还是一个多模态的工作,它有一个图像编码器,一个文本编码器,prompt在文本这边,更多的还是像一个NLP的工作。
将可学习的Prompt方法用到纯视觉任务中,做法如下图所示。
论文地址:https://arxiv.org/abs/2203.12119
论文标题:Visual Prompt Tuning
标题翻译:视觉提示调整
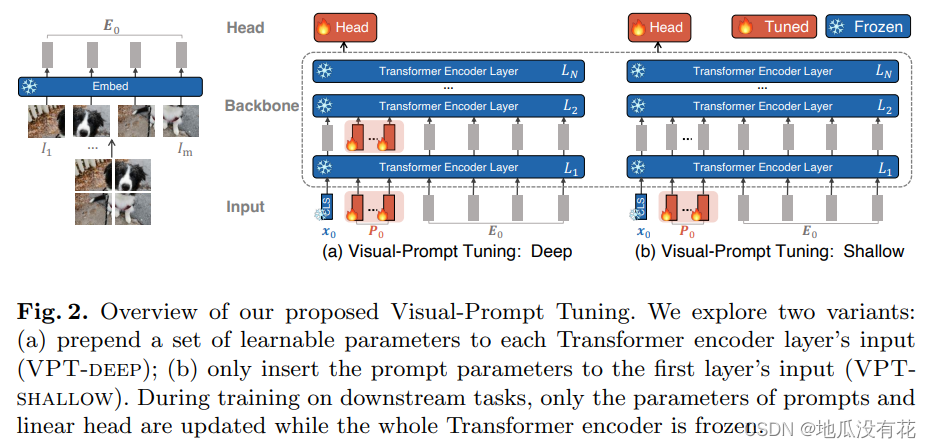
图中蓝色部分是原来训练好的模型,红色是需要微调的prompt,加入Prompt tuning有两种方式:
1、VPT: Shallow,在输入端加入learnable的prompt。这和文本那边的处理方法相似。
具体来说,就是当你拥有一个图片的时候,先使用VIT将其打成patch,这些patch通过Embedding层的到输入的sequence。比如一开始是224*224的图片,达成patch之后,变成一个长度为196的token sequence,这个就是准备喂给transformer的输入,也就是图片中的E0。将E0看成文本端的class 那么或者是photo of class,我们很容易可以想到prompt应该加到它之前,这跟文本那边一模一样。此时,只有input的prompt是在学习的,剩下所有过程中的模型参数都是锁住的,最后的目标函数只用来优化这跟prompt,即图片中的P0.
2、VPT: Deep,在每一层的输入输出都加入learnable的prompt。
上述进行
PEFT的共通性就是,当你有一个已经训练好的大模型的时候,是希望这个模型是锁住不动的,这样不光有利于训练,还有利于做部署,做下游任务的transfer,而且它的性能还不降,很多时候还不降反升。
huggingface上传了一个专门用来做PEFT的包:https://github.com/huggingface/peft
当你只有很少量的硬件或者当你的GPU内存不高的时候,如何去FineTune或者使用这些Billion scale的模型,可以试一下PEFT。
近期PEFT方法总结,从统一的观点进行归纳:
论文地址:https://arxiv.org/abs/2110.04366
回归正题
3. AIM模型设计
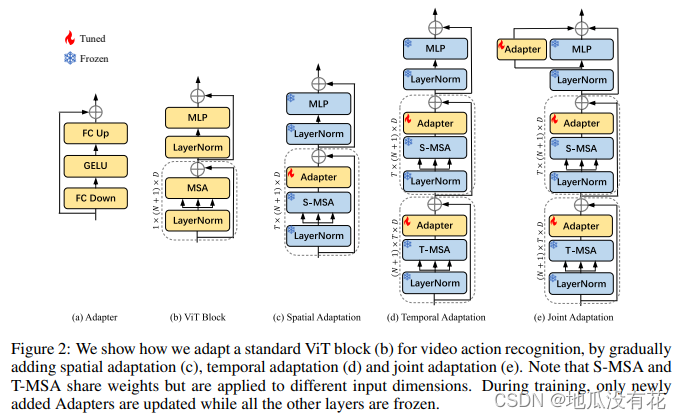
做视频理解的工作大致为以下三个方向:
(1)在SpatialBackbone上下文章(如上图c),
(2)在TemporalAnalysis上下文章(如上图d),
(3)怎么去学Joint Spatial Temporal Modeling(如上图e),
因此本文也是按照上述套路加的Adapter。
如上图所示,AIM模型就是在图b的ViT模型中加入图a的Adapter,共有图c、d、e三种方式:
1、Spatial Adaptation,只在S-MSA层后面加入Adapter,即不增加视频理解能力,只加一些学习的参数。
2、Temporal Adaptation,复用一个MSA层,在两个MSA层后面都加入Adapter,即让模型从Spatial和Temporal两个方向上进行学习,从而有时序建模的能力。
3、Joint Adaptation,在Temporal Adaptation的基础上,在MLP边上也加入Adapter,即让三个Adapter各司其职,使得优化问题更简单一些。
注:MSA是多头自注意力(MultiHead Self-Attention,S-MSA和T-MSA共享权重,但维度不同。
效果如下图所示,只用14M参数的AIM模型效果已经高过之前121M的模型。
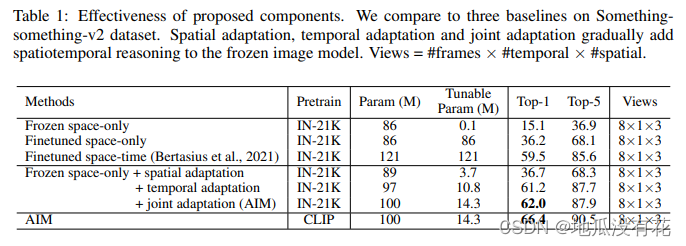
总之,在视频工作中,使用PEFT(parameter efficient fine tuning)后,大部分的实验一台8卡机就能完成,短则半天,长则三四天。
除了PEFT(parameter efficient fine tuning),其实前几年比较火的,就是怎么把Attention做成Efficient Attention,比如Learn Former、Performer等这些Attention的近似,最近还出了一个更好的,叫Flash Attention,更省内存,而且效果也非常的好。
第二个方向:Existing stuff(pretrained model)
有两点:
1、不要碰预训练模型。巧妙使用别人的预训练模型,从而达到去做FewShot,ZeroShot,或者最多Fine Tuning的实验。
2、新的研究方向。
通过这篇论文讲述这两点是如何运用的:
论文地址:https://arxiv.org/abs/2207.05027
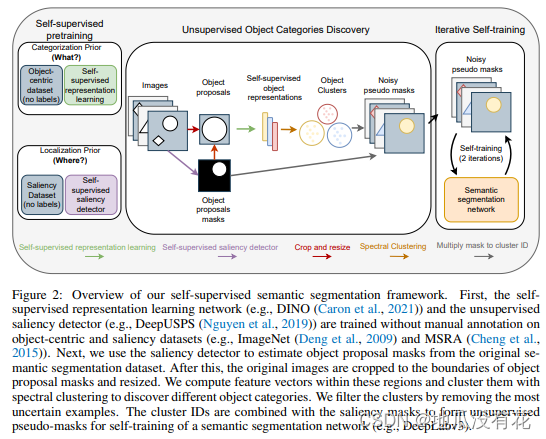
论文标题:Unsupervised Semantic Segmentation with Self-supervised Object-centric Representations
从标题就可以看出这两点技巧:
1、这里的Self-supervised是指使用了预训练好的DINO、DeepUSPS、BASNet等网络
2、这里做的方向是Object-centric Learning,属于蓬勃发展的题目,玩家不多、数据集不大。
我们也知道,这些所谓的Unsupervised其实都不是真的Unsupervised,实际上是通过认为设计了一些任务或者label,让模型去学习。
这里也不例外,你如果想学习一个Segmentation的网络,肯定是需要某种程度上的Mask Information。这个Mask Information是借鉴了Saliency Detection的工作,如DeepUSPS,即可以直接给定一张图片,然后它可以给你生成这张图片里那些比较有显著性物体的Mask是长什么样,虽然有些糙,也不准确,但也算是有个起始点了,有一些Mask信息了。
上图展示了如何使用几个预训练好的模型,在无监督的情况下找到新的物体,步骤如下:
1、通过预训练模型DeepUSPS找到一些显著性物体的Mask。
例如,图片中的篮球可以得到一个圆形的Mask
2、根据Mask将图片中的对应物体抠出来,并调整大小为224*224。
例如,将图片中的篮球抠出来并放大
3、然后将步骤2得到的图片通过预训练模型DINO返回一个1024*1024的特征(global representation)。
4、将所有的特征进行聚类Clustering,这样就可以通过无监督学习得到这些物体的分类ID。
注:聚类只能将相同的物体分类到一起,但并不知道具体是什么物体。
5、将图片和对应的分类ID去训练一个语义分割网络(Semantic segmentation network)。(可以是PSP.NET、DeepLab V3)
注:这里相当于一个有监督的学习,标签来自于步骤4
6、一张图片可能有多个物体,所以加一个Self-training,多做几个轮回。
这样就可以从图片中找到物体了。
一些比较新的Topic
(1)Causality Learning (因果学习)
(2)Hinton之前提出的Feedforward Network,FFNet
(3)Language 那边的In-Context Learning
(4)Chain of Thought Prompting,就是Aston前几期讲过的AI鼓励师,COT
第三个方向:plug-and-play
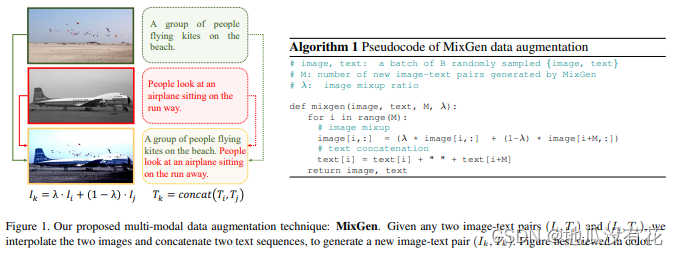
做一些通用的、即插即用的模块,在一个设定的范围内,加入了这样的模块后,能够有一个统一的涨点,并且能给出合适的分析,就非常有说服力了。通过MixGen论文讲述如何加入模块:
论文地址:https://arxiv.org/abs/2206.08358
论文标题:MixGen: A New Multi-Modal Data Augmentation
文本的模型都很大,图片的模型相对来说小一些,但是自注意力的参数是可以共享的,所以尝试用文本大模型来蒸馏图片小模型
注:模型蒸馏:使用训练集训练出来一个完整复杂的teacher模型,然后设计一个小规模的student模型,再固定teacher模型的权重参数,然后使用训练集和teacher模型的输出同时对student模型进行训练,此时就需要设计一系列loss,让student模型在蒸馏学习的过程中逐渐向teacher模型的表现特性靠拢,使得student模型的预测精度逐渐逼近teacher模型。
为什么之前图片模型不做数据增强?
1、图片模型训练时已经用了很多图片了,不需要再做数据增强。
’2、或者做了数据增强,但是将其中的Color Jittering和Random Filp去掉了,因为这两个对图片的变化会导致图片和文本不匹配。
例如:图片有白色的狗和绿色的树,只对图片做Color Jittering会导致颜色变化,图片中不再是白色的狗,但是文本依然是白色的狗,这样文本和图片就不匹配了。
图片这边的做法,如果想保留所有的信息,尽量不去毁坏他原来的东西,一个比较天然的选择就是Mixup,Mixup就是把两张图片线性地插值到一起。
论文的做法:既然目标是尽可能保留更多信息,这里的做法很简单粗暴,就是直接将两个句子拼接在一起,这样就可以做到不丢失信息的情况下得到新的训练样本。
例如下图,将两个图片通过数据增强得到第三个图片,同时将两个图片的文本进行拼接得到第三个图片的文本。即在图片上做Mixed Up,在文本上做Concate。
这个是在数据处理的时候做的,即在Data Loader里完成的,无论你换什么方法,比如Vilt、ALBAF、BEIT等,或者换什么Codebase,比如Pytorch、TensorFlow等都无所谓,只要在Data Loader把这一步加进去就行,其他什么都不用改,真的算是即插即用,而且能获得普遍的提升。
审稿人的建设性提议:在下游任务只有少量数据时进行数据增强。
第四个方向: Dataset,evaluation and survey
这个方向是对计算资源要求最少的。
构建数据集、发表分析为主的文章或者综述论文,这里举了两篇论文为例。
以数据集为主的big detection,将三个数据集整合到一起:
论文地址:https://arxiv.org/abs/2203.13249
论文标题:BigDetection: A Large-scale Benchmark for Improved Object Detector Pre-training
上述论文是一个非常大的目标检测的数据集,目标检测是一个非常实用的任务。这篇论文是将三个已有的数据集(LVIS、Open Image、Object 365)合到一起,当然不是简单的合到一起,因为每个数据集的class也不是完全一样的,所以需要考虑怎么去merge这些class或者怎么去重新分布这些类别。而且根据你的这个任务需求,你到底是想做预训练还是下游任务,你到底是想target哪一个domain,这个也决定了你这个物体的类别到底该多细粒度,这些都是可以做的研究方向。总之,这个big detection最后处理完,就是一个有600类的目标检测数据集,里面有超过340万的训练图片,有3600万个bounding box annotation,算是当时最大的一个目标检测数据集了,而且在上面可以预训练各种各样的目标检测器。因为训练数据多,所以训练出来的目标检测器的泛化能力和few shot的能力都非常好。
这个数据集比较新,刷的人也比较少,可以在这个数据集上面做一些out of distribution的分析、robustness的分析、few shot zero shot的各种各样的分析或者测评,都是不错的研究方向。
视频动作检测的综述论文:
论文地址:https://arxiv.org/abs/2012.06567
论文标题:A Comprehensive Study of Deep Video Action Recognition