这篇文章将详细介绍 如何在 stm32103 板子上点亮一个LED.
文章目录
- 前言
- 一、开发环境搭建。
- 二、LED 原理图解读
- 三、什么是 GPIO
- 四、cubeMX 配置工程
- 五、解读 cubeMX 生成的代码
- 六、延时函数
- 七、控制引脚状态函数
- 点亮 LED
- 八、GPIO 的工作模式
- 九、为什么使用推挽输出驱动 LED
- 总结
前言
- 实验开发板:STM32F103C8T6。
- 所需软件:keil5 , cubeMX 。
- 实验目的:了解 led 点亮原理,cubeMX配置 , GPIO 等相关函数 。
一、开发环境搭建。
- 代码编写软件 : MDK keil5 。
- 图形化配置软件 :STM32cubeMX。
- 仿真器驱动 : STLINK 。
- 串口驱动 :CH340 。
对于以上软件的安装可以参考 : 最详细 keil5 和 cubeMX安装教程
二、LED 原理图解读
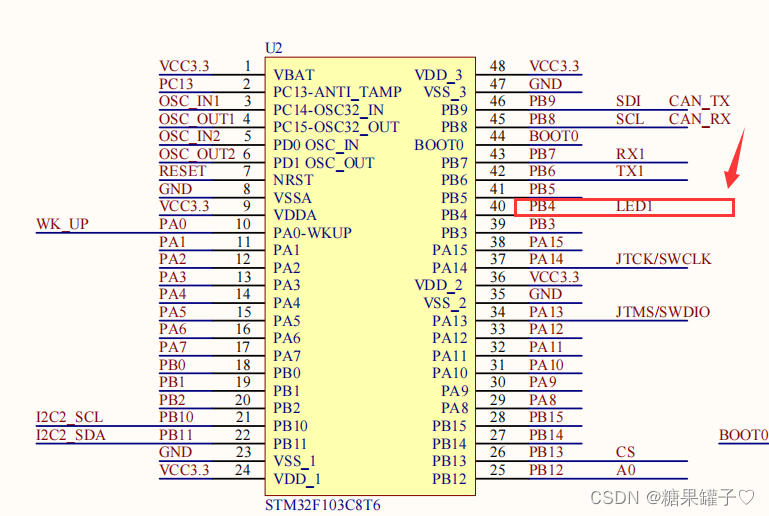
芯片的原理图如上图,可以看到控制 LED1 的引脚是 PB4 。
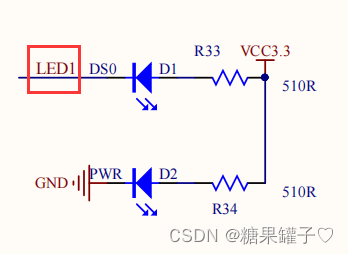
灯 D1 的 右边接在 VCC 电源上,如果 想要点亮 led , 需要将 led 的左侧 GPIO 引脚 PB4 设置为 低电平即可。那么该图是 低电平控制 led 。
- 高电平:通常表示逻辑1,可以是与电源电压相对应的电压(例如3.3V或5V)。
- 低电平:通常表示逻辑0,可以是与地电压(0V)相对应的电压。
三、什么是 GPIO
GPIO ,全称为通用输入输出(General-Purpose Input/Output ),是 连接外部设备的通用接口。用于与外部设备进行数字信号的输入和输出。它在嵌入式系统、单片机、单板计算机等领域都有广泛的应用,使数字系统能够与外部世界互动和通信。
-
输入:
GPIO 可以用于接受外部设备发送的数字信号,如 按钮的状态,传感器数据。获取外部数据或事件。 -
输出:
GPIO 可以用于向外部设备发送数字信号,如控制 LED, 继电器,电机等。 操作和控制外部设备。
四、cubeMX 配置工程
- 首先创建工程。
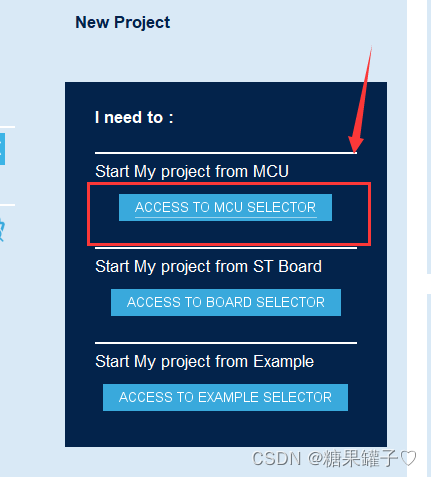
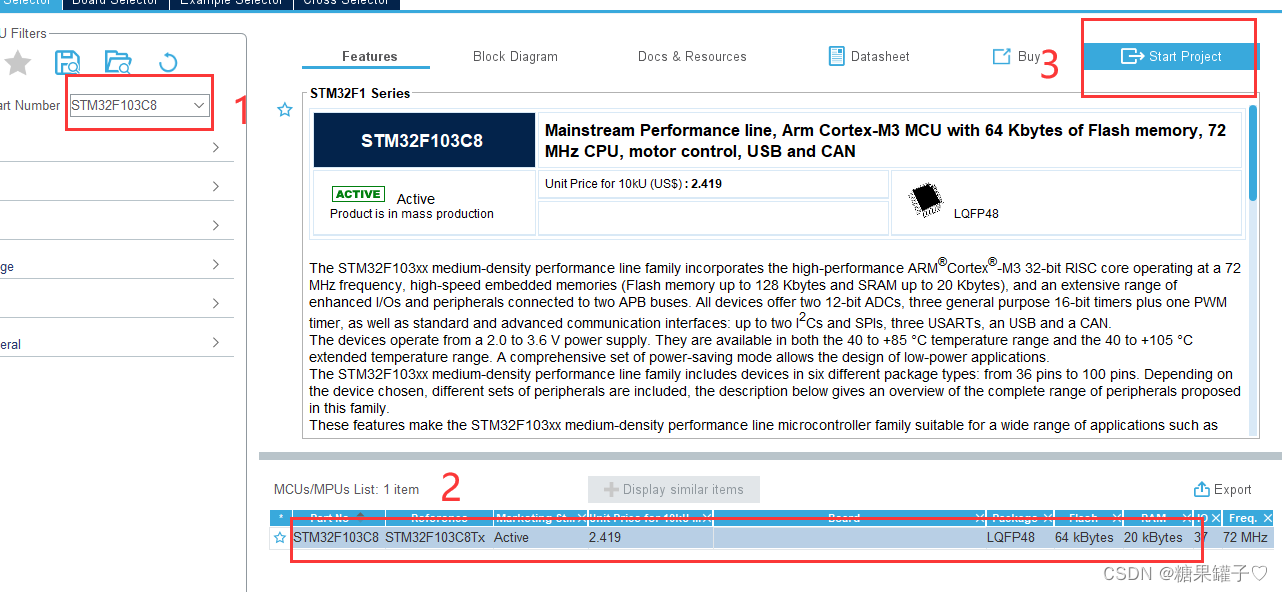
- 选择芯片,开始创建工程。
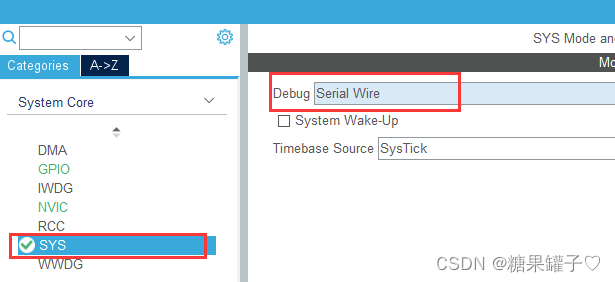
- 设置 SYS 模块,选择串行线。
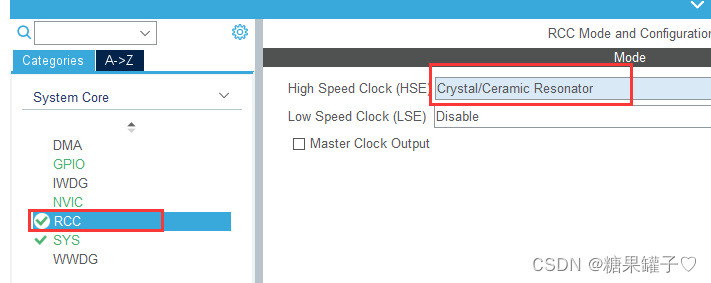
- 选择晶体共振。
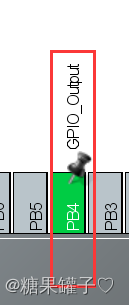
- 将 PB4 引脚设置为 gpio 输出口。
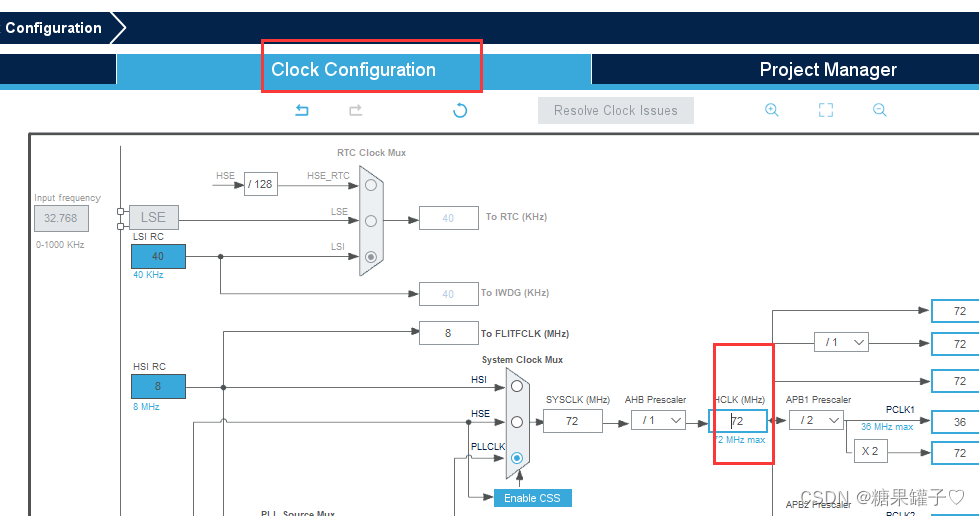
- 设置时钟频率。
直接设置为 最大频率 72 ,然后双击 enter 即可。
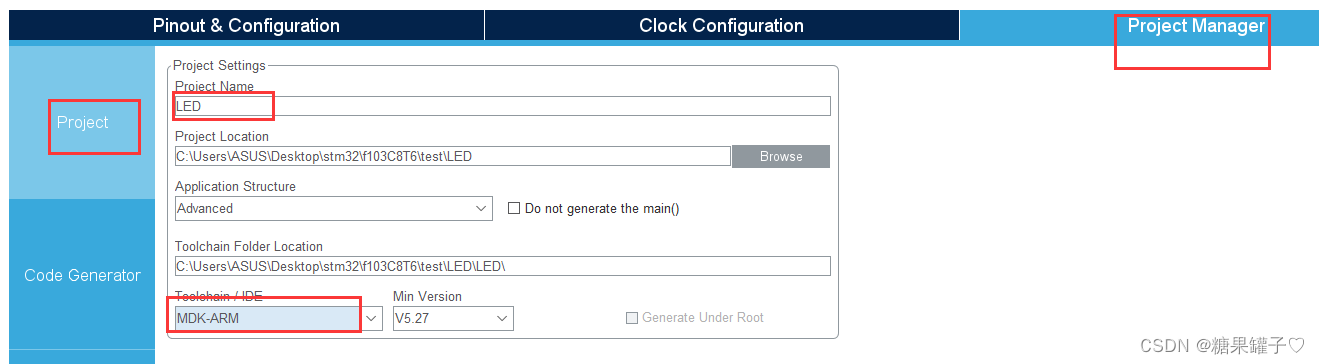
- 设置工程的名字,工具链选择 MDK。
- 点击自动生成 .c / .h 文件。
.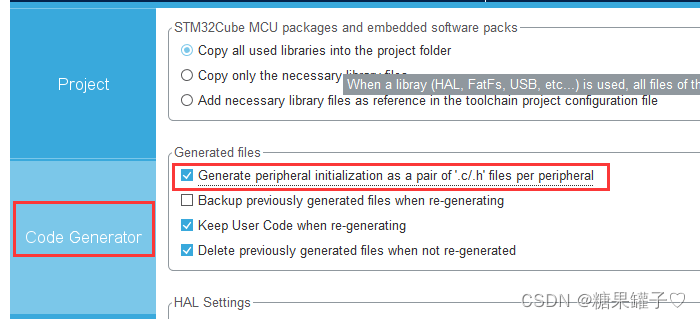
- 点击生成即可。
这样就可以生成 keil 的工程文件。

五、解读 cubeMX 生成的代码
cubeMX 会自动生成 GPIO 初始化的代码。
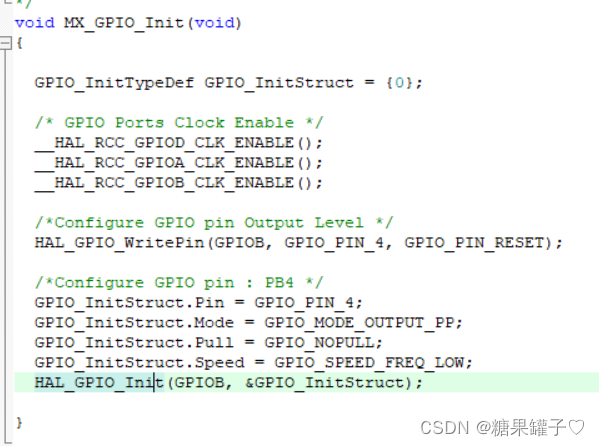
代码解析:
- 首先创建一个 GPIO 变量。
GPIO_InitTypeDef GPIO_InitStruct = {0};
- GPIO 引脚的使能。
可以看到这里分别使能了 GPIOA , GPIOB , GPIOD 端口。
__HAL_RCC_GPIOD_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();- 设置 GPIO 中PB4 引脚的输出电平。
这里设置的是输出低电平 GPIO_PIN_RESET。
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_4, GPIO_PIN_RESET);
- 设置 GPIO 端口的引脚号,模式,上拉电阻,速度。
GPIO_InitStruct.Pin = GPIO_PIN_4;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
- 初始化引脚设置。
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
六、延时函数
__weak void HAL_Delay(uint32_t Delay);
uint32_t Delay :表示要延时时间,以毫秒(ms)为单位。这是一个无符号的 32 位整数。
__weak :是一个弱符号。
七、控制引脚状态函数
- GPIO 写函数:
用于设置指定 GPIO 引脚输出状态。
void HAL_GPIO_WritePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin, GPIO_PinState
PinState);
参数解释:
-
GPIOx : 这是一个指向 GPIO_TypeDef 结构体的指针,指定了要控制的GPIO端口,例如GPIOA、GPIOB等。
-
GPIO_Pin : 这是一个16位的整数,指定要设置的特定引脚。可以使用宏定义来指定要控制的引脚,例如GPIO_PIN_0,GPIO_PIN_1,GPIO_PIN_2等。
-
PinState : 这是一个枚举类型 GPIO_PinState,用于指定要写入的引脚状态。它有两个可能的值:GPIO_PIN_RESET和GPIO_PIN_SET,分别代表引脚输出低电平和高电平。
- GPIO 翻转函数:
这里的函数参数 和 写函数的参数大致相同,可以参考 HAL_GPIO_WritePin 函数 。
void HAL_GPIO_TogglePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin);
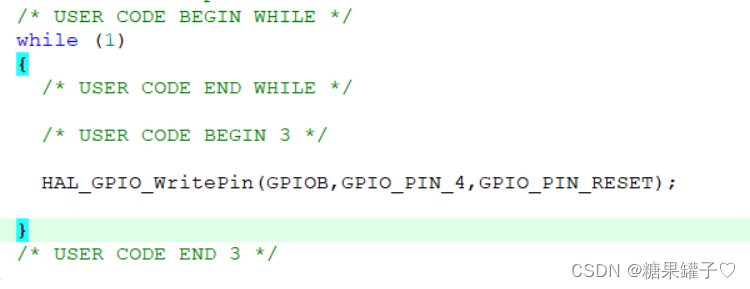
点亮 LED
在 工程的 while 函数中使用 写函数 HAL_GPIO_WritePin 点亮 LED.
tips:
可以讲代码写在 BEGIN 和 END 之间,这样当我们重新生成代码时 就不会造成代码销毁。
八、GPIO 的工作模式
GPIO的8种工作模式:
输入模式(Input Mode):GPIO引脚被配置为输入模式时,它可以接收外部设备发送的信号。引
脚可以检测输入信号的高电平或低电平,并将其转换为数字值供系统使用。输出模式(Output Mode):GPIO引脚被配置为输出模式时,它可以向外部设备发送信号。系统
可以控制引脚输出的高电平或低电平,从而控制外部设备的行为。推挽输出模式(Push-Pull Output Mode):在推挽输出模式下,GPIO输出引脚可以提供强驱动
电平。引脚在高电平和低电平之间切换,可以提供较低的输出电阻,适合驱动较重的负载。开漏输出模式(Open-Drain Output Mode):在开漏输出模式下,GPIO输出引脚变为开漏输
出。引脚在低电平时为接地(GND)连接,而在高电平时处于高阻态。这种模式适合与其他开漏设
备或外部上拉电阻结合使用。复用输入模式(Alternate Function Input Mode):GPIO引脚可以配置为复用输入模式,用于
接收外部信号并执行特定功能。在此模式下,引脚还可以用于其他功能,例如定时器输入或串行通
信接口。复用输出模式(Alternate Function Output Mode):GPIO引脚可以配置为复用输出模式,用
于将特定功能的输出信号发送到外部设备。在此模式下,引脚还可以用于其他功能,例如PWM输
出或串行通信接口。模拟模式(Analog Mode):有些GPIO引脚支持模拟模式,可以用于连接模拟电路,例如传感器
或音频设备。在模拟模式下,引脚可以输入或输出连续的模拟电信号。中断模式(Interrupt Mode):GPIO引脚可以配置为中断模式,以便在引脚状态发生变化时触发中断。这允许系统在无需不断轮询GPIO状态的情况下,对引脚的变化进行响应。
九、为什么使用推挽输出驱动 LED
- 推挽输出可以提供稳定的高电平和低电平。
- 能够提供较高的输出电流能力。
- 可以连接到 LED,为不需要外部的电流限制电阻。
- 适用于数字信号的控制。
总结
下一篇文章将继续为大家介绍 STM32F103C8T6 使用 cubeMX 通过 按键 点亮 led。