目录
1 数据处理
1.1 导入库文件
1.2 导入数据集
1.3 缺失值分析
2 VMD经验模态分解
3 构造训练数据
4 LSTM模型训练
5 预测
1 数据处理
1.1 导入库文件
import time
import datetime
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
from sampen import sampen2 # sampen库用于计算样本熵
from vmdpy import VMD # VMD分解库import tensorflow as tf
from sklearn.cluster import KMeans
from sklearn.metrics import r2_score, mean_squared_error, mean_absolute_error, mean_absolute_percentage_error
from sklearn.preprocessing import MinMaxScaler
from tensorflow.keras.models import Sequential
from tensorflow.keras.layers import Dense, Activation, Dropout, LSTM, GRU
from tensorflow.keras.callbacks import ReduceLROnPlateau, EarlyStopping# 忽略警告信息
import warnings
warnings.filterwarnings('ignore') 1.2 导入数据集
实验数据集采用数据集8:新疆光伏风电数据集(下载链接),数据集包括组件温度(℃) 、温度(°) 气压(hPa)、湿度(%)、总辐射(W/m2)、直射辐射(W/m2)、散射辐射(W/m2)、实际发电功率(mw)特征,时间间隔15min。对数据进行可视化:
# 导入数据
data_raw = pd.read_excel("E:\\课题\\08数据集\\新疆风电光伏数据\\光伏2019.xlsx")
data_rawfrom itertools import cycle
# 可视化数据
def visualize_data(data, row, col):cycol = cycle('bgrcmk')cols = list(data.columns)fig, axes = plt.subplots(row, col, figsize=(16, 4))fig.tight_layout()if row == 1 and col == 1: # 处理只有1行1列的情况axes = [axes] # 转换为列表,方便统一处理for i, ax in enumerate(axes.flat):if i < len(cols):ax.plot(data.iloc[:,i], c=next(cycol))ax.set_title(cols[i])else:ax.axis('off') # 如果数据列数小于子图数量,关闭多余的子图plt.subplots_adjust(hspace=0.6)plt.show()visualize_data(data_raw.iloc[:,1:], 2, 4)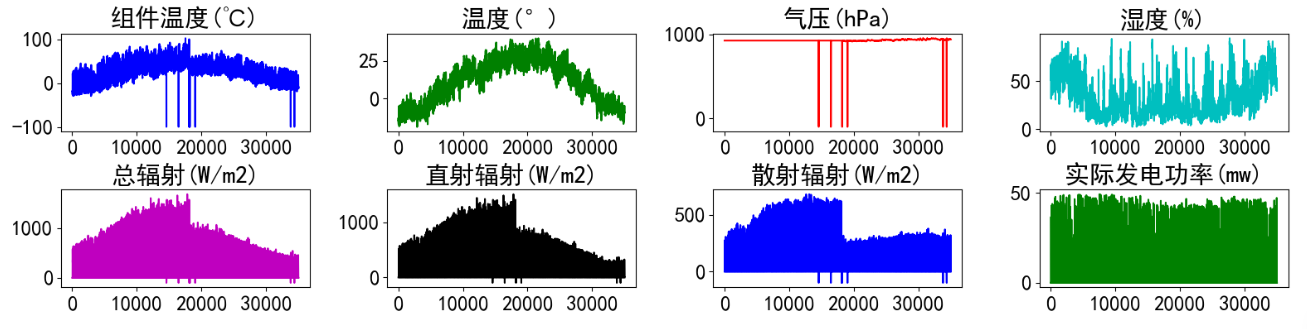
单独查看部分功率数据,发现有较强的规律性。

因为只是单变量预测,只选取实际发电功率(mw)数据进行实验:
1.3 缺失值分析
首先查看数据的信息,发现并没有缺失值
data_raw.info()
进一步统计缺失值
data_raw.isnull().sum()
2 VMD经验模态分解
使用VMD将目标信号分解成若干个模态,进一步可视化分解结果
# VMD分解函数
# signal: 输入信号
# alpha: 正则化参数
# tau: 时间尺度参数
# K: 分量数量
# DC: 是否包括直流分量
# init: 初始化方法
# tol: 收敛容限
# n_ite: 最大迭代次数
def vmd_decompose(series=None, alpha=2000, tau=0, K=7, DC=0, init=1, tol=1e-7, draw=True): # 得到 VMD 分解后的各个分量、分解后的信号和频率imfs_vmd, imfs_hat, omega = VMD(series, alpha, tau, K, DC, init, tol) # 将 VMD 分解分量转换为 DataFrame, 并重命名df_vmd = pd.DataFrame(imfs_vmd.T)df_vmd.columns = ['imf'+str(i) for i in range(K)]return df_vmddf_vmd = vmd_decompose(data_raw['实际发电功率(mw)']) # 对 df_raw_data['AQI'] 进行 VMD 分解,并将结果赋值给 df_vmd
# 绘制 df_vmd 的数据,以子图形式显示每个分量
ax = df_vmd.plot(title='VMD Decomposition', figsize=(16,8), subplots=True,fontsize=16)
for a in ax:a.legend(loc='upper right',prop={'size': 14})plt.subplots_adjust(hspace=0.5)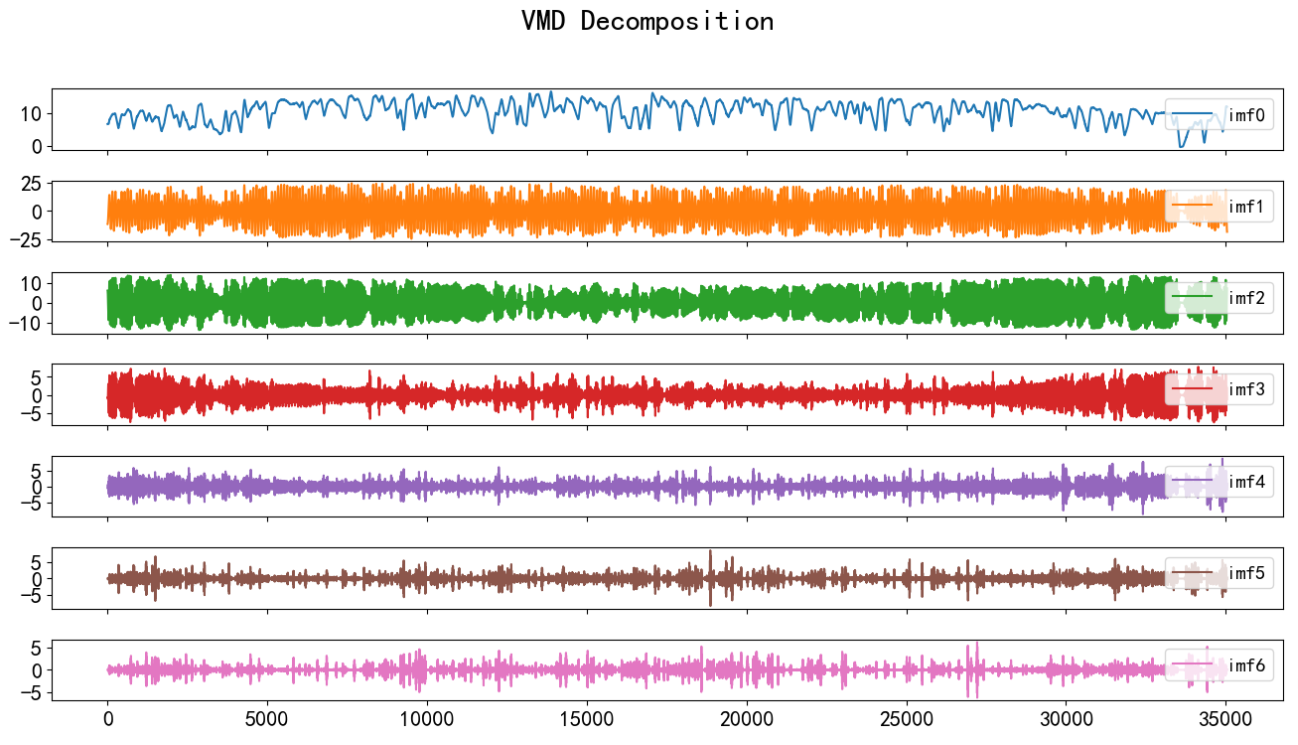
将原始数据和分解后的模态合并
df_vmd['sum'] = data_raw['实际发电功率(mw)'] # 将 data_raw['实际发电功率(mw)']添加到 df_vmd 中的 'sum' 列
这里利用VMD-LSTM进行预测的思路是通过VMD将原始功率分解为多个变量,然后将分解变量作为输入特征,将原始出力功率作为标签,将单变量转为多变量进行预测。

3 构造训练数据
构造训练数据,也是真正预测未来的关键。首先设置预测的timesteps时间步、predict_steps预测的步长(预测的步长应该比总的预测步长小),length总的预测步长,参数可以根据需要更改。
timesteps = 96*5 #构造x,为96*5个数据,表示每次用前96*5个数据作为一段
predict_steps = 96 #构造y,为96个数据,表示用后96个数据作为一段
length = 96 #预测多步,预测96个数据
feature_num = 7 #特征的数量通过前5天的timesteps数据预测后一天的数据predict_steps个,需要对数据集进行滚动划分(也就是前timesteps行的特征和后predict_steps行的标签训练,后面预测时就可通过timesteps行特征预测未来的predict_steps个标签)。因为是多变量,特征和标签分开划分,不然后面归一化会有信息泄露的问题。
# 构造数据集,用于真正预测未来数据
# 整体的思路也就是,前面通过前timesteps个数据训练后面的predict_steps个未来数据
# 预测时取出前timesteps个数据预测未来的predict_steps个未来数据。
def create_dataset(datasetx,datasety,timesteps=36,predict_size=6):datax=[]#构造xdatay=[]#构造yfor each in range(len(datasetx)-timesteps - predict_steps):x = datasetx[each:each+timesteps]y = datasety[each+timesteps:each+timesteps+predict_steps]datax.append(x)datay.append(y)return datax, datay
数据处理前,需要对数据进行归一化,按照上面的方法划分数据,这里返回划分的数据和归一化模型,函数的定义如下:
# 数据归一化操作
def data_scaler(datax,datay):# 数据归一化操作scaler1 = MinMaxScaler(feature_range=(0,1))scaler2 = MinMaxScaler(feature_range=(0,1))datax = scaler1.fit_transform(datax)datay = scaler2.fit_transform(datay)# 用前面的数据进行训练,留最后的数据进行预测trainx, trainy = create_dataset(datax[:-timesteps-predict_steps,:],datay[:-timesteps-predict_steps,0],timesteps, predict_steps)trainx = np.array(trainx)trainy = np.array(trainy)return trainx, trainy, scaler1, scaler2然后对数据按照上面的函数进行划分和归一化。通过前5天的96*5数据预测后一天的数据96个,需要对数据集进行滚动划分(也就是前96*5行的特征和后96行的标签训练,后面预测时就可通过96*5行特征预测未来的96个标签)
datax = df_vmd[:,:-1]
datay = df_vmd[:,-1].reshape(df_vmd.shape[0],1)
trainx, trainy, scaler1, scaler2 = data_scaler(datax, datay)
4 LSTM模型训练
首先搭建模型的常规操作,然后使用训练数据trainx和trainy进行训练,进行50个epochs的训练,每个batch包含128个样本(建议使用GPU进行训练)。预测并计算误差,训练好将模型保存,并进行可视化,将这些步骤封装为函数。
# # 创建lSTM模型
def LSTM_model_train(trainx, trainy):# 调用GPU加速gpus = tf.config.experimental.list_physical_devices(device_type='GPU')for gpu in gpus:tf.config.experimental.set_memory_growth(gpu, True)# LSTM网络构建 start_time = datetime.datetime.now()model = Sequential()model.add(LSTM(128, input_shape=(timesteps, feature_num), return_sequences=True))model.add(Dropout(0.5))model.add(LSTM(128, return_sequences=True))model.add(LSTM(64, return_sequences=False))model.add(Dense(predict_steps))model.compile(loss="mean_squared_error", optimizer="adam")# 模型训练model.fit(trainx, trainy, epochs=50, batch_size=128)end_time = datetime.datetime.now()running_time = end_time - start_time# 保存模型model.save('vmd_lstm_model.h5')# 返回构建好的模型return modelymodel = LSTM_model_train(trainx, trainy)5 预测
首先加载训练好后的模型
# 加载模型
from tensorflow.keras.models import load_model
model = load_model('vmd_lstm_model.h5')准备好需要预测的数据,训练时保留了6天的数据,将前5天的数据作为输入预测,将预测的结果和最后一天的真实值进行比较。
y_true = datay[-timesteps-predict_steps:-timesteps]
x_pred = datax[-timesteps:]预测并计算误差,并进行可视化,将这些步骤封装为函数。
# 预测并计算误差和可视化
def predict_and_plot(x, y_true, model, scaler, timesteps):# 变换输入x格式,适应LSTM模型predict_x = np.reshape(x, (1, timesteps, feature_num)) # 预测predict_y = model.predict(predict_x)predict_y = scaler.inverse_transform(predict_y)y_predict = []y_predict.extend(predict_y[0])# 计算误差r2 = r2_score(y_true, y_predict)rmse = mean_squared_error(y_true, y_predict, squared=False)mae = mean_absolute_error(y_true, y_predict)mape = mean_absolute_percentage_error(y_true, y_predict)print("r2: %.2f\nrmse: %.2f\nmae: %.2f\nmape: %.2f" % (r2, rmse, mae, mape))# 预测结果可视化cycol = cycle('bgrcmk')plt.figure(dpi=100, figsize=(14, 5))plt.plot(y_true, c=next(cycol), markevery=5)plt.plot(y_predict, c=next(cycol), markevery=5)plt.legend(['y_true', 'y_predict'])plt.xlabel('时间')plt.ylabel('功率(kW)')plt.show()return y_predicty_predict_nowork = predict_and_plot(x_pred, y_true, model, scaler2, timesteps)最后得到可视化结果,发下可视化结果并不是太好,可以通过调参和数据处理进一步提升模型预测效果。