文章目录
- 前言
- 实现思路
- 想法1
- 想法2
- 想法3
- 补充
- 实现
- 想法1
- 想法2
- 代码
- 想法3
- 代码
- 总结
前言
读前须知:
首先我们得确保你已经完全知晓相关的基本的数学知识,其中包括用最小二乘法拟合曲二次曲面,以及曲面的曲率详细求解。若还是没弄清楚,则详细请看下面链接。
【点云、图像】学习中 常见的数学知识及其中的关系与python实战[更新中](建议从一个标题上从上往下看,比较循序渐进)
补充:曲率:反映曲面在某一点处的弯曲程度,它与该点及其邻近点的位置和法向量有关。
以及一些open3d的常见操作:
爆肝5万字❤️Open3D 点云数据处理基础(Python版)
先上结果:
实现思路
不同于常见的缺陷检测,如:划痕或者斑点这些肉眼可见的缺陷,凹凸性缺陷难以肉眼可见甚至得打光照射才能看见凹槽,这里我们使用深度摄像机(普通相机+深度信息),来采集深度信息。此时我们把图像称为深度图,当然深度图也可以转换为点云。
这里我们仅对点云这种数据进行处理。
要求:对异形曲面微细缺陷识别(我6月份之前要完成的毕设)
这里缺陷主要指凸起和凹槽。
想法1
想法1:如果是一个平面上出现凹槽或凸起的话,首先确立一个由大部分点拟合的平面,然后对不在此平面的点云进行高程分析,以确立凹陷或凸起程度。
(事实上不会很平,于是想法1排除,但可以用来做平面来做一个简单示例)
想法2
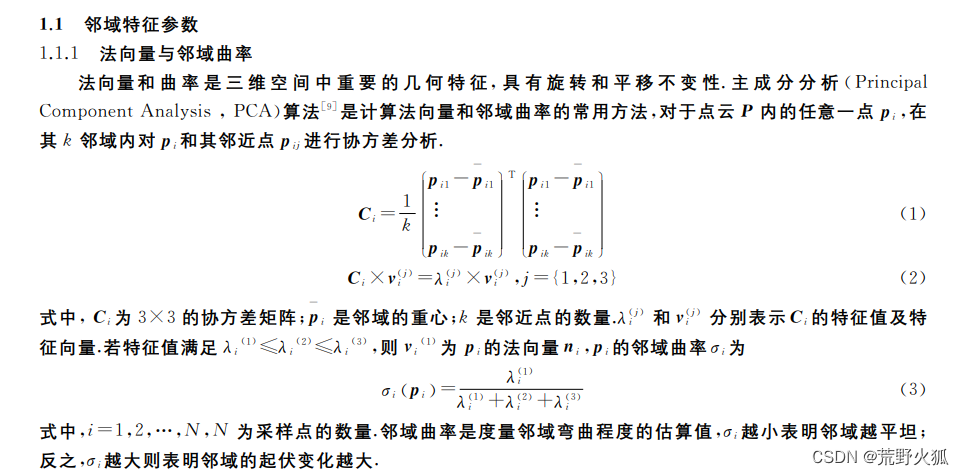
想法2:计算点云上每个点的领域曲率来描绘点的弯曲程度。
想法3
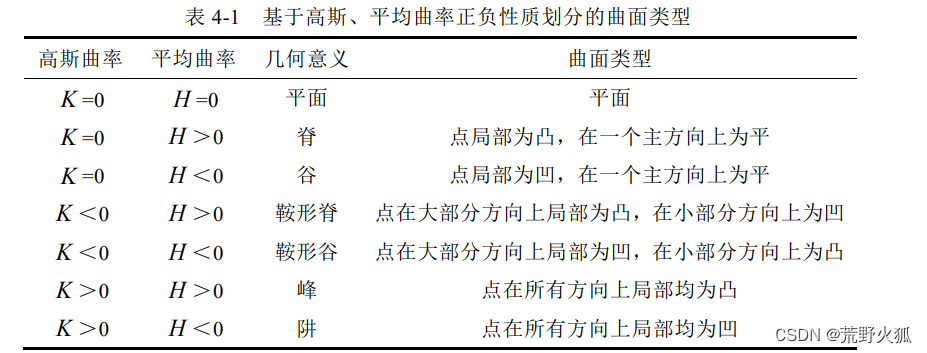
想法3:计算点云上每个点的高斯曲率和平均曲率来描绘点的弯曲程度。
补充
机器学习——详解KD-Tree原理
实现
想法1
暂无
想法2
想法2:
在求取完领域曲率的基础上,我们对其曲率的大小进行一个分割,并进行可视化。
这里进一步对这个领域曲率的定义进行详解。
首先,我们已经在这里的实战1了解到了领域曲率的求法。
基于邻域特征点提取和匹配的点云配准_李新春
可是这个定义我只在其他的博客中和下面这篇论文中找到定义,并无在wiki百科中找到相关阐述。
找了半天后依然无法解释其中原因,于是在参考了下面两篇博文后
如何理解矩阵特征值?
特征值的最大值与最小值
想出了这么一个合理的解释:
1、这个曲率定义的优点是,它不依赖于法向量的方向,而且它的值域是 [0, 1/3],这使得它比较容易进行归一化和可视化。
2、那么,为什么用最小的特征值除以特征值和,而不是用最大的特征值除以特征值和呢?
这是因为最小的特征值对应的特征向量是曲面的法向量,而最大的特征值对应的特征向量是曲面的主方向。
如果用最大的特征值除以特征值和,那么曲率的值就会与曲面的主方向的弯曲程度成正比,而与曲面的法向方向的弯曲程度无关。这样就会忽略掉曲面的凹凸变化,导致曲率的计算不准确。
如果用最小的特征值除以特征值和,那么曲率的值就会与曲面的法向方向的弯曲程度成正比,而与曲面的主方向的弯曲程度无关。这样就可以反映出曲面的凹凸变化,提高曲率的计算精度。
因此,用最小的特征值除以特征值和,而不是用最大的特征值除以特征值和,是为了更好地描述曲面的局部形状,而不是曲面的整体方向。
于是我们就可以坦然用这个定义来求取了。
代码
怕点云太多算不过来,首先对例子中的兔子点云进行了一个下采样。(如何获取兔子点云到时候再出教程)
import open3d as o3d
import numpy as npdef pca_compute(data, sort=True): #1、主成分分析average_data = np.mean(data, axis=0) # 求每一列的平均值,即求各个特征的平均值decentration_matrix = data - average_data # 去中心化矩阵H = np.dot(decentration_matrix.T, decentration_matrix) # 求协方差矩阵 #协方差是衡量两个变量关系的统计量,协方差为正表示两个变量正相关,为负表示两个变量负相关eigenvectors, eigenvalues, eigenvectors_T = np.linalg.svd(H) # 求特征值与特征向量 #H = UΣV^T #输出列向量、对角矩阵、行向量if sort:sort = eigenvalues.argsort()[::-1] # 从大到小排序 .argsort()是升序排序,[::-1]是将数组反转,实现降序排序eigenvalues = eigenvalues[sort] # 特征值 ## 使用索引来获取排序后的数组return eigenvaluesdef caculate_surface_curvature(radius,pcd):#2、计算点云的表面曲率cloud = pcdpoints = np.asarray(cloud.points) #点云转换为数组 点云数组形式为[[x1,y1,z1],[x2,y2,z2],...]kdtree = o3d.geometry.KDTreeFlann(cloud) #建立KDTreenum_points = len(cloud.points) #点云中点的个数curvature = [] # 储存表面曲率for i in range(num_points):k, idx, _ = kdtree.search_radius_vector_3d(cloud.points[i], radius) #返回邻域点的个数和索引neighbors = points[idx] #数组形式为[[x1,y1,z1],[x2,y2,z2],...]w = pca_compute(neighbors)#调用第1步 #由降序排序,w[2]为最小特征值 #np.zeros_like(w[2])生成与w[2]相同形状的全0数组delt = np.divide(w[2], np.sum(w)) #根据公式求取领域曲率curvature.append(delt)curvature = np.array(curvature, dtype=np.float64)return curvaturedef curvature_normal():#3、曲率归一化 从0-1/3归到0-1之间curvature = caculate_surface_curvature(radius,pcd) #调用第2步c_max = max(curvature)c_min = min(curvature)cur_normal = [(float(i) - c_min) / (c_max - c_min) for i in curvature] return cur_normaldef draw(cur_max,cur_min,pcd):#4、绘图cur_normal = curvature_normal()#调用第3步pcd.paint_uniform_color([0.5,0.5,0.5]) #初始化所有颜色为灰色for i in range(len(cur_normal)):if 0 < cur_normal[i] <= cur_min: #归一化后的曲率np.asarray(pcd.colors)[i] = [1, 0, 0]#红elif cur_min < cur_normal[i] <= cur_max:np.asarray(pcd.colors)[i] = [0, 1, 0]#绿elif cur_max < cur_normal[i] <= 1: np.asarray(pcd.colors)[i] = [0, 0, 1]#蓝# 可视化o3d.visualization.draw_geometries([pcd])cur_max = 0.7
cur_min = 0.3 #曲率分割基准
radius = 0.05
voxel_size = 0.01 #越小密度越大
pcd = o3d.io.read_point_cloud("bunny.pcd")
print(pcd)
pcd = pcd.voxel_down_sample(voxel_size) #下采样
draw(cur_max,cur_min,pcd)结果:

这个长度,宽度报错可以不管,有点子强迫症的可以在可视化改成:
o3d.visualization.draw_geometries([pcd],window_name="可视化原始点云",width=800, height=800, left=50, top=50,mesh_show_back_face=False)
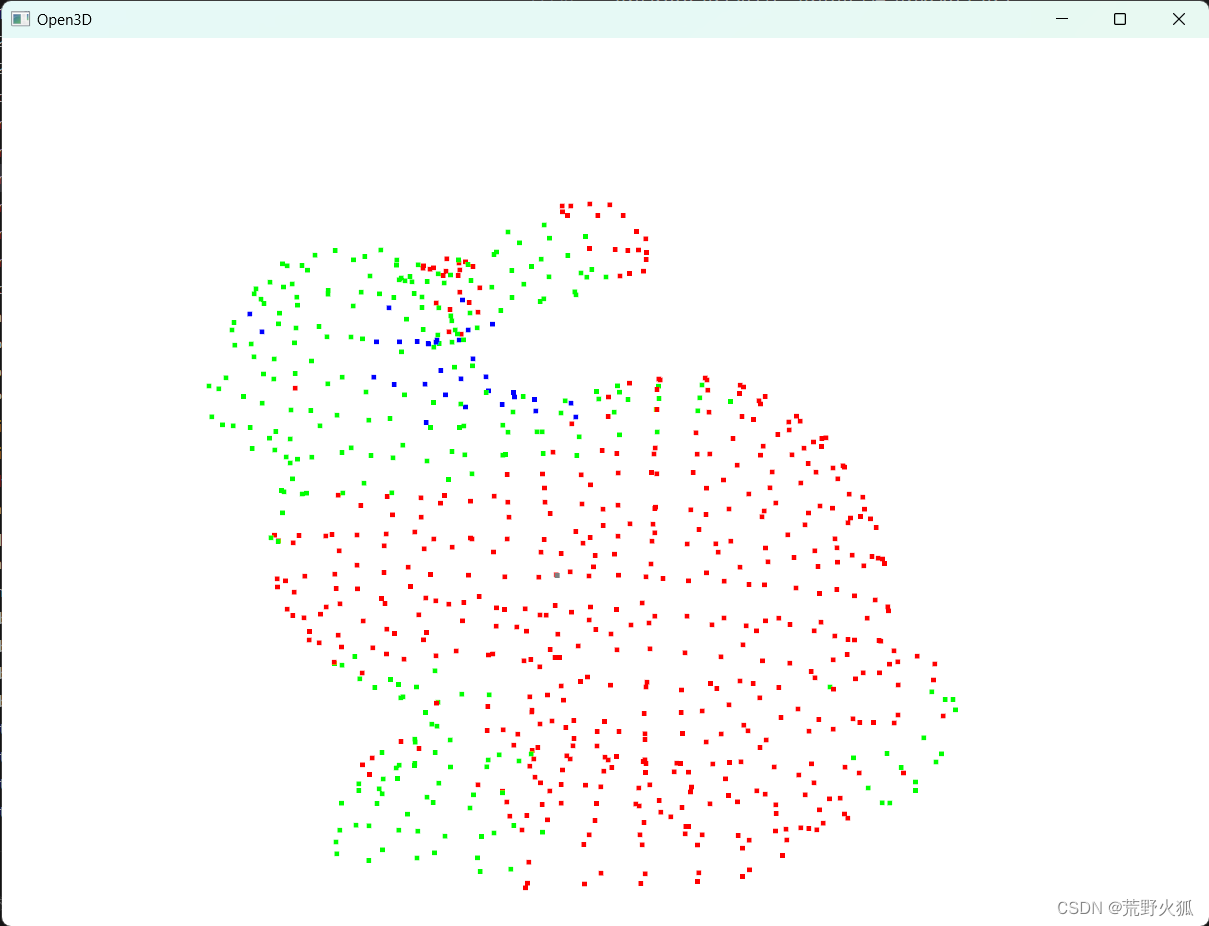
红色为曲率较低,绿色曲率中等,蓝色曲率较高。
发现效果上不太行,红色一些部分看着曲率也很高,甚至还出现了一个初始化时候的灰点,可能求邻近点的时候没取到?不曾得知。
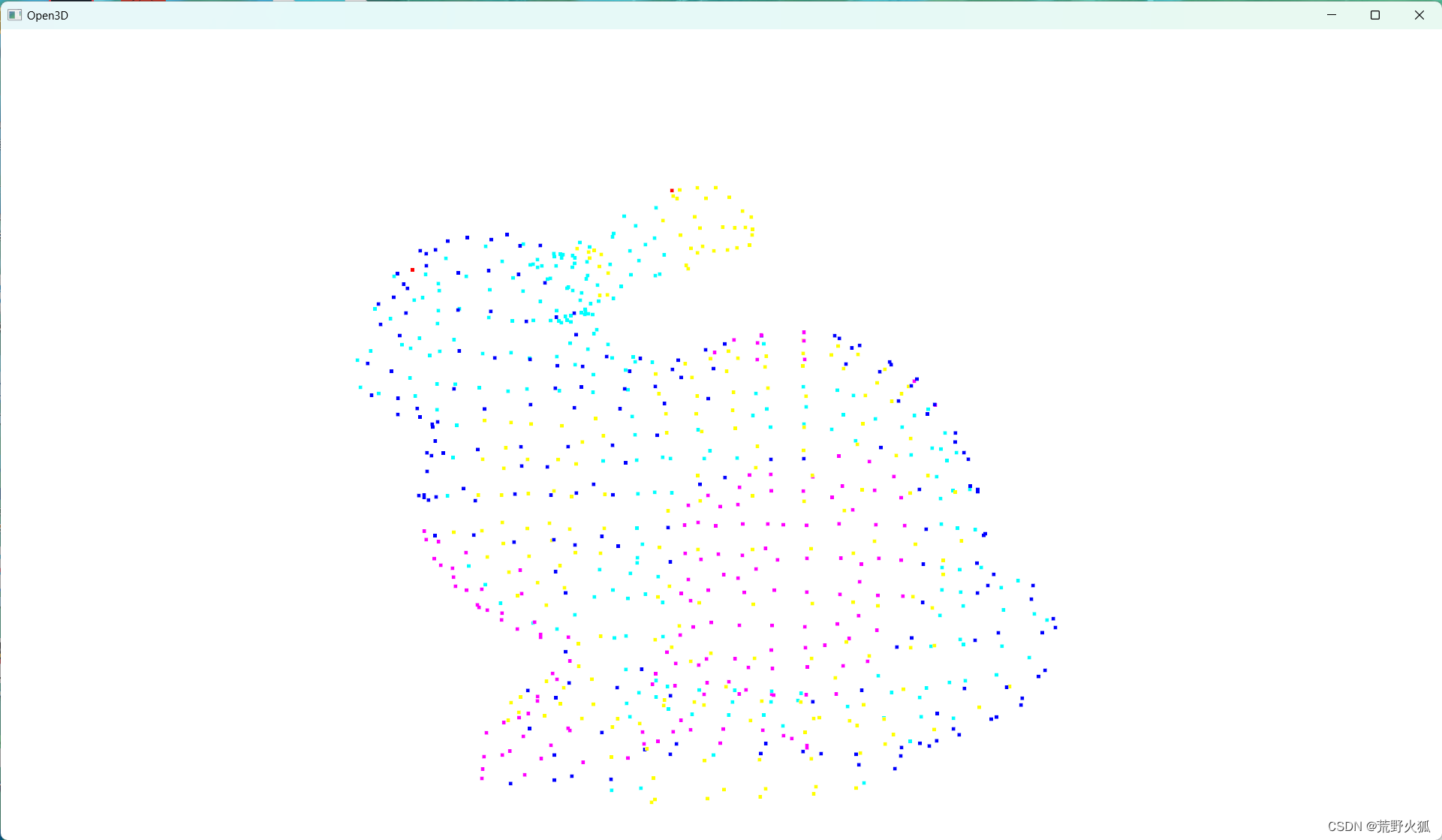
想法3
首先我们在这里的高斯曲率和平均曲率求解有了一些认识。
附一张图:
代码
import open3d as o3d
import numpy as np
from scipy.optimize import curve_fitvoxel_size = 0.01 #越小密度越大
radius = 0.07
pcd = o3d.io.read_point_cloud("bunny.pcd")
pcd = pcd.voxel_down_sample(voxel_size) #下采样
cloud = pcd
points = np.asarray(cloud.points) #点云转换为数组 点云数组形式为[[x1,y1,z1],[x2,y2,z2],...]
kdtree = o3d.geometry.KDTreeFlann(cloud) #建立KDTree
num_points = len(cloud.points) #点云中点的个数
pcd.paint_uniform_color([1, 0, 0]) # 初始化所有颜色为红色
# 定义非线性函数,这里假设是一个二次曲面
def func(x, a, b, c, d, e, f):return a * x[0]**2 + b * x[1]**2 + c * x[0] * x[1] + d * x[0] + e * x[1] + f
def f(x, y):return popt[0]*x**2 +popt[1]*y**2 +popt[2]* x*y +popt[3]*x + popt[4]*y +popt[5]
# 定义曲面的梯度函数,即一阶偏导数
def gradient(f, x, y):# 使用中心差分法近似求导 #参考https://cloud.tencent.com/developer/article/1685164h = 1e-6 # 差分步长,可以根据精度要求调整df_dx = (f(x + h, y) - f(x - h, y)) / (2 * h) # 对x求偏导df_dy = (f(x, y + h) - f(x, y - h)) / (2 * h) # 对y求偏导return df_dx, df_dy
# 定义曲面的曲率函数,即二阶偏导数
def curvature(f, x, y):# 使用中心差分法近似求导h = 1e-6 # 差分步长,可以根据精度要求调整d2f_dx2 = (f(x + h, y) - 2 * f(x, y) + f(x - h, y)) / (h ** 2) # 对x求二阶偏导d2f_dy2 = (f(x, y + h) - 2 * f(x, y) + f(x, y - h)) / (h ** 2) # 对y求二阶偏导d2f_dxdy = (f(x + h, y + h) - f(x + h, y - h) - f(x - h, y + h) + f(x - h, y - h)) / (4 * h ** 2) # 对xy求混合偏导# 根据公式计算高斯曲率K和平均曲率Hdf_dx, df_dy = gradient(f, x, y) # 调用梯度函数求一阶偏导E = 1 + df_dx ** 2F = df_dx * df_dyG = 1 + df_dy ** 2L = d2f_dx2 / np.sqrt(1 + df_dx ** 2 + df_dy ** 2) #np.sqrt()表示开方M = d2f_dxdy / np.sqrt(1 + df_dx ** 2 + df_dy ** 2)N = d2f_dy2 / np.sqrt(1 + df_dx ** 2 + df_dy ** 2)K = (L * N - M ** 2) / (E * G - F ** 2) # 高斯曲率H = (E * N + G * L - 2 * F * M) / (2 * (E * G - F ** 2)) # 平均曲率return K, Hcurvatures = []
for i in range(num_points):k, idx, _ = kdtree.search_radius_vector_3d(cloud.points[i], radius) #返回邻域点的个数和索引neighbors = points[idx] #数组形式为[[x1,y1,z1],[x2,y2,z2],...]#print(k)Y = neighbors[:, 2] # 因变量X = neighbors[:, [0,1]] # 自变量 [[2,3],[1,1],[8,9],[11,12],[4,5],[8,9]] 6*2popt, pcov = curve_fit(func, xdata=X.T,ydata= Y)x = cloud.points[i][0] # 某一点的x坐标y = cloud.points[i][1] # 某一点的y坐标K, H = curvature(f, x, y) # 计算该点的曲率curvatures.append([K,H])print(curvatures)
for i in range(len(curvatures)):if -0.05<curvatures[i][0] < 0.05 and -0.05<curvatures[i][1] <0.05: #平坦np.asarray(pcd.colors)[i] = [0, 0, 0]#黑elif -0.05<curvatures[i][0] < 0.05 and curvatures[i][1] >0.05: #凸np.asarray(pcd.colors)[i] = [1, 0, 0]#红elif -0.05<curvatures[i][0] < 0.05 and -0.05<curvatures[i][1] <0.05: #凹np.asarray(pcd.colors)[i] = [0, 1, 0]#绿elif curvatures[i][0] < -0.05 and curvatures[i][1] >0.05: #鞍形脊 大部分凸,少部分凹np.asarray(pcd.colors)[i] = [0, 0, 1]#蓝elif curvatures[i][0] < -0.05 and curvatures[i][1] <-0.05: #鞍形谷 大部分凹,少部分凸np.asarray(pcd.colors)[i] = [0, 1, 1]#青elif curvatures[i][0] > 0.05 and curvatures[i][1] >0.05: #峰 np.asarray(pcd.colors)[i] = [1, 0, 1]#紫elif curvatures[i][0] > 0.05 and curvatures[i][1] <-0.05: #阱np.asarray(pcd.colors)[i] = [1, 1, 0]#黄#显示点云
o3d.visualization.draw_geometries([pcd])结果:
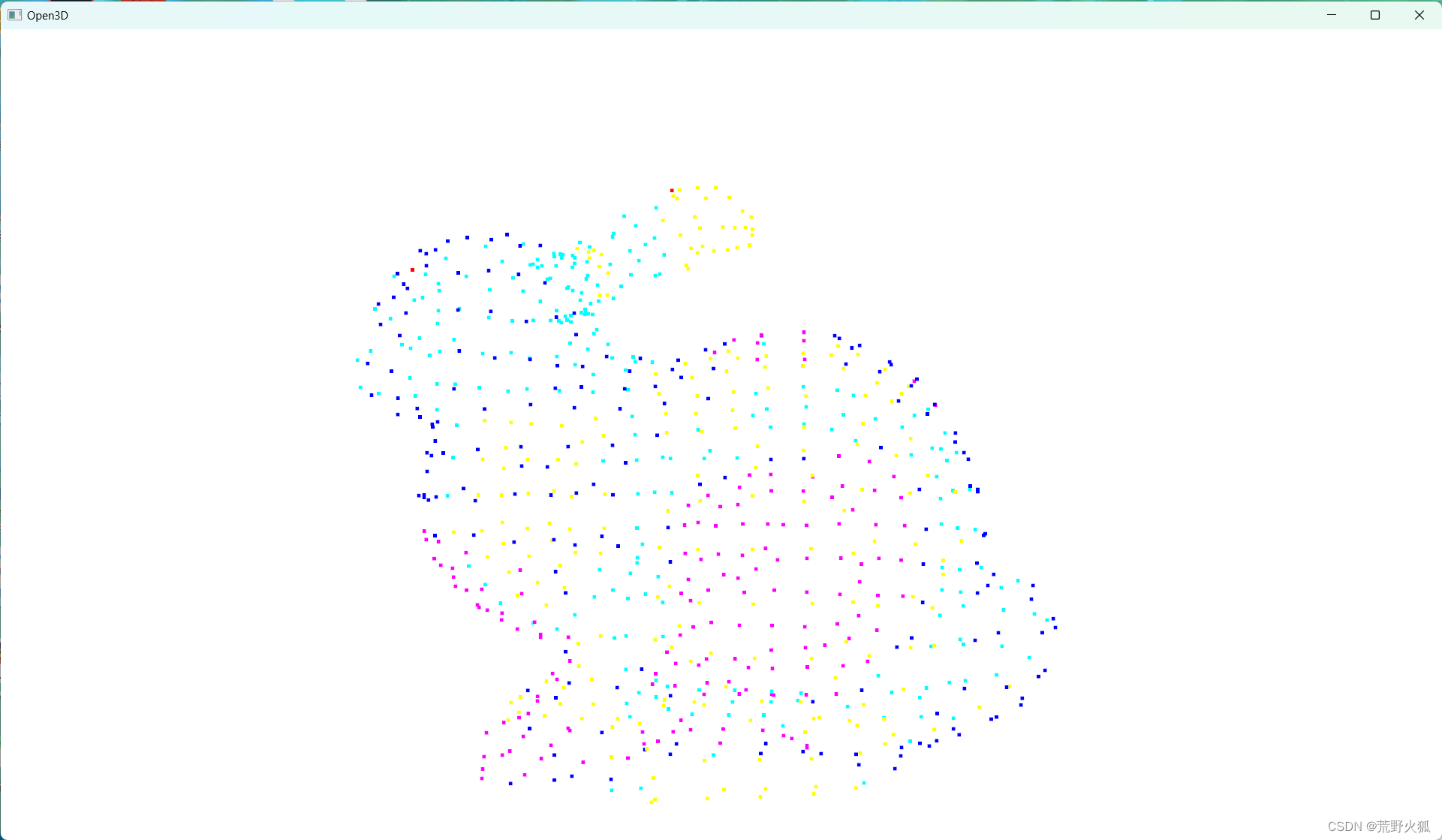
结果出奇的好,每个点都进行了划分,比想法1好太多了。这里暂时用兔子点云测试,到时候创造一些平面点云再来测试一下。
总结
学习东西都不是一蹴而就的,果然还是得一步一步脚踏实地地学才学的明白。chatgpt是个好东西,只有你也会点东西时,它才会回答的正确,不能轻信之。
未完成:
ps:1、兔子点云pcd读取
2、创建平面点云
3、返回面积、深度信息



![【web | CTF】BUUCTF [护网杯 2018] easy_tornado](https://img-blog.csdnimg.cn/direct/0ff50c504a754de286f85d0632376dd3.png)
![[OPEN SQL] 修改数据](https://img-blog.csdnimg.cn/direct/a275ec0c8bb44cae93bbd67bb39bb922.png)
![[BIZ] - 1.金融交易系统特点](https://img-blog.csdnimg.cn/direct/6489c57a78dd4a3986cb1269c4e6dd2e.png)