目录
Introduction
TECHNICAL PARAMETERS
ELECTRICAL SPECIFICATION
MECHANICAL SPECIFICATION
Introduction
OVERVIEW
TR1W belongs to the class of the smallest ADSB transceivers on market and has been developed for civil and commercial Unmanned Aircraft Systems. The device operates on 1090 MHz and allows to receive and transmit ADSB data with 1 Watt output power. The transceiver does not require external devices to operate. It is equipped with a high quality multiGNSS receiver and a pressure sensor. The aluminium housing and ESD protection guarantee high resistance of the device to work in difficult conditions. TR1W opens the way to the implementation of the Detect and Avoid algorithms, supporting the integration of UAS into the airspace.

BASIC FEATURES
• Realtime aircraft tracking on 1090 MHz
• Patented FPGAInTheLoopTM technology with the capability of receiving thousands of frames per second
• Integrated GNSS source and pressure sensor
• 1 Watt RF output power
• Implemented MAVLink and AEROTM protocol
• Lowpower consumption and low weight design
• Simple plug&play integration
• Programming via AT commands
• Designed to meet MOPS DO260B (except the output power)
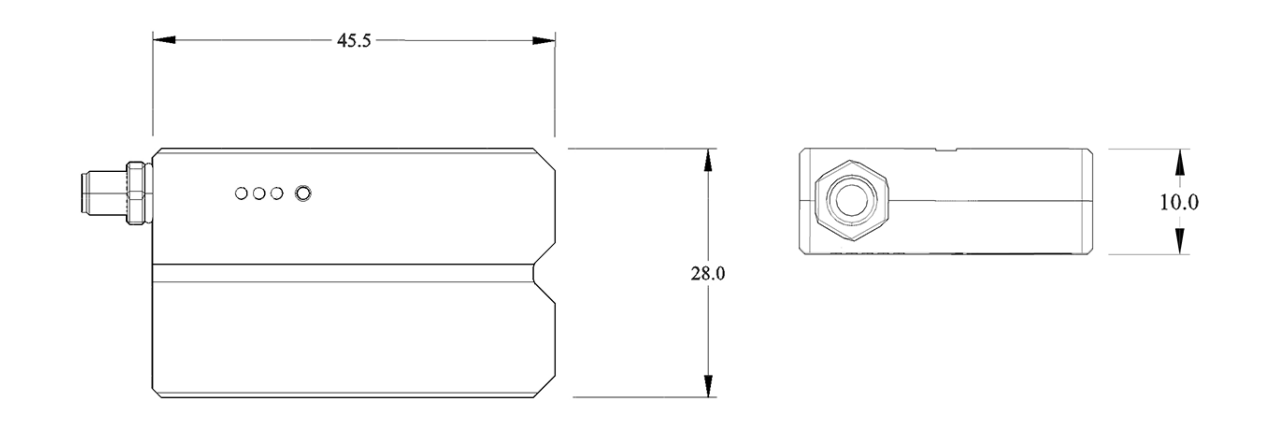
• Dimension: 45.5 x 28.0 x 10.0 mm
TECHNICAL PARAMETERS
| Parameter | Value |
| Frequency | 1090 MHz |
| Input voltage | 5 V |
| Current consumption | 130 mA |
| Sensitivity | 80 dBm |
| RF Output power | +30 dBm |
| ESD protection | All lines |
| MAVLink (baud) | 115200 bps |
| AERO (baud) | 115200 bps (AT commands) |
| Main connector | PXMBNI05RPM04APC |
| Antenna connector | 2 x MCX |
| Dimension | 45.5 x 28.0 x 10.0 mm |
| Weight (without cables and antennas) | 30 grams |
ELECTRICAL SPECIFICATION
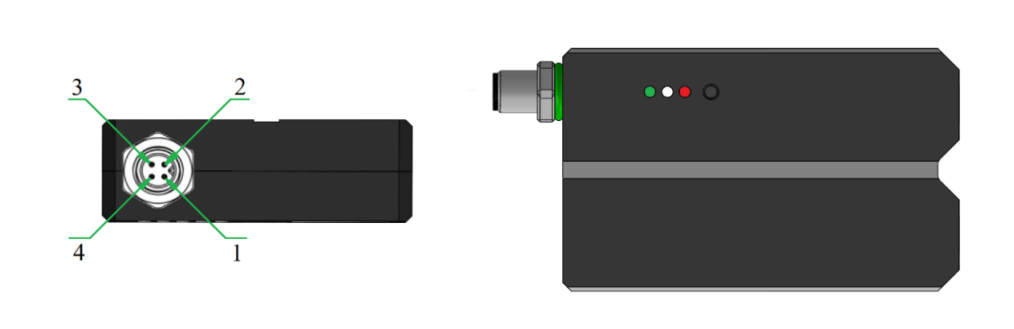
PIN DEFINITION
| Pin | Wire colour | Name | Function |
| 1 | Red | +5 V | Power supply (5 V/ 130 mA) |
| 2 | Green | TX | Data from device to host |
| 3 | White | RX | Data from host to device |
| 4 | Black | GND | Ground |
LED INDICATORS
| LED | Function |
| Green | Power supply indicator |
| White | Frame detection / receive indicator |
| Red | ADSB OUT indicator 1. OFF – Disabled 2. Blink – Wait for FIX 3. ON – Active |
MECHANICAL SPECIFICATION
All dimensions in mm (tolerances ±0.1 mm)
| Connector | Type | Example |
| Main | Installed on board | BULGIN, PXMBNI05RPM04APC |
| Mating connector | BULGIN, PXPPVC05FBF04ACL010PVC | |
| Antenna | Installed on board | MCX, 73415 1061 |
| Mating connector | MOLEX, 733660010 |
Reference: https://www.avionix-tech.com