potree 官网示例

前置条件:
potree 无法直接加载 LAS,LCD,PLY等格式的点云文件,
需要通过 PotreeConverte 转换为 octree 数据格式,前端渲染中加载转换后的 json 格式
格式转换方向
.las ---- potreeConverter ----> .json
结合 vue3 使用
1、模板 html 引入 potree 官网示例中的所有 js 依赖
potree 示例中的 js 依赖如下:
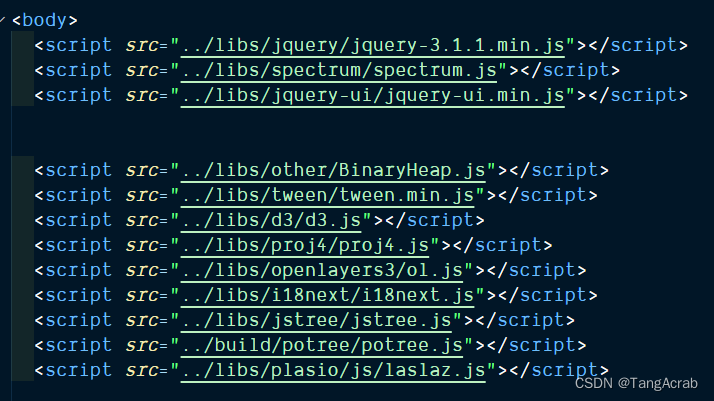
确保能在 vue 项目中,window 中有 potree
2、创建渲染视图区域组件
组件挂载后初始化 viewer
// 全局常量
const Potree = window.Potree;
const THREE = window.THREE;
const i18next = window.i18next;
const TWEEN = window.TWEEN;const viewer: Ref = ref(null); // viewer 容器// 初始化视图容器const initViewer = () => {if (!Potree || viewer.value) return;let viewerArgs = {noDragAndDrop: true,};viewer.value = new Potree.Viewer(document.getElementById(`potree_render_area${areaIdIndex}`),viewerArgs,);// 创建原始引用const Viewer = toRaw(viewer.value)// 设置裁剪属性Viewer.setClipTask(Potree.ClipTask.SHOW_INSIDE);Viewer.loadGUI();// 禁用 edlViewer.setEDLEnabled(false);// 设置视场角Viewer.setFOV(60);// viewer最大可视点云数量固定Viewer.setPointBudget(50 * 1000 * 1000);Viewer.loadSettingsFromURL();// 设置天背景Viewer.setBackground('black');Viewer.setDescription('');Viewer.setMinNodeSize(0);Viewer.setControls(Viewer.earthControls);// 官方 自带 GUi// this.viewer.loadGUI(() => {// this.viewer.setLanguage('zh');// window.$('#menu_tools').next().show();// window.$('#menu_clipping').next().show();// this.viewer.toggleSidebar();// });// 注册 Sidebarsidebar = new Sidebar(Viewer)sidebar.init()console.log('viewer initialized');};onMounted(() => {nextTick(() => {// 挂载后初始化视图initViewer();});});
3、加载点云数据
Potree.loadPointCloud(path).then((e: any) => {// PointCloudOctree实例// 该实例有唯一的uuid,可以保存起来方便后续对该实例进行操作let pointcloud = e.pointcloud;// console.log(pointcloud)appStore.setOriginFileUuid(fileId, pointcloud.uuid)// 材质let material = pointcloud.material;// name赋值// pointcloud.name = 'fileName';// 检查是否有彩色信息let hasRGBA =pointcloud.getAttributes().attributes.find((a: any) => a.name === 'rgba') !== undefined;if (hasRGBA) {material.activeAttributeName = 'rgba';} else {material.activeAttributeName = 'color';}// 点云点大小material.size = 1;material.minSize = 1;material.maxSize = 16;material.pointSizeType = Potree.PointSizeType.FIXED;// 设置高程渐变方案material.gradient = Potree.Gradients.TURBO;// 将点云数据添加到场景viewer.value.scene.addPointCloud(pointcloud);viewer.value.setBackground('black');// 设置相机viewer.value.zoomTo(e.pointcloud);// 设置控制器// viewer.value.setControls(viewer.value.earthControls);// 设置视场角viewer.value.setFOV(60);// 设置最小节点大小,值越小越清晰viewer.value.setMinNodeSize(0);// 打开高质量渲染viewer.value.useHQ = false;// 点云数量fetch(path).then((response) => response.json()).then((jsonData) => {// name赋值pointcloud.name = jsonData.name;// 点云数量// 根据导入的点云数据来设置对应的点云数量// viewer.value.setPointBudget(jsonData.points);// 设置点云数量pointcloud.pointBudget = jsonData.points;// 设置初始视角viewer.value.scene.view.setView(new THREE.Vector3(6.44, -6.70, 5.52), new THREE.Vector3(-0.53, 0.55, -0.63));viewer.value.scene.view.lookAt(-0.53, 0.55, -0.63);});})
4、结合官网提供的 工具栏代码,进行其他深入操作
export class Sidebar {viewer: anymeasuringTool: anyprofileTool: anyvolumeTool: anyconstructor(viewer: any) {this.viewer = viewer;this.measuringTool = viewer.measuringTool;this.profileTool = viewer.profileTool;this.volumeTool = viewer.volumeTool;}initScene() {// 监听点云追加let onPointCloudAdded = (e: any) => {let pointcloud: any = e.pointcloud;console.log('initScene--pointcloud------>')console.log(pointcloud)SceneObj.pointclouds.push(pointcloud)// let cloudIcon = `${Potree.resourcePath}/icons/cloud.svg`;// let node = createNode(pcID, pointcloud.name, cloudIcon, pointcloud);pointcloud.addEventListener("visibility_changed", () => {console.log(pointcloud.visible)if (pointcloud.visible) {// tree.jstree('check_node', node);} else {// tree.jstree('uncheck_node', node);}});};// 监听测量对象let onMeasurementAdded = (e: any) => {let measurement = e.measurement;console.log('添加测量对象')// console.log(measurement);nextTick(() => {setTimeout(() => {const meItem = {checked: true,label: measurement.name,id: measurement.uuid,}console.log(e.scene.measurements);// 追加测量对象数appStore.addMeasurementsTreeData(meItem, measurement.uuid)// let icon = Utils.getMeasurementIcon(measurement);// createNode(measurementID, measurement.name, icon, measurement);}, 0);})};// 监听体积增加let onVolumeAdded = (e: any) => {let volume = e.volume;// let icon = Utils.getMeasurementIcon(volume);// let node = createNode(measurementID, volume.name, icon, volume);volume.addEventListener("visibility_changed", () => {console.log(volume)if (volume.visible) {// tree.jstree('check_node', node);} else {// tree.jstree('uncheck_node', node);}});};// 监听高度坡面增加let onProfileAdded = (e: any) => {let profile = e.profile;// let icon = Utils.getMeasurementIcon(profile);// createNode(measurementID, profile.name, icon, profile);};// 监听标注事件let onAnnotationAdded = (e: any) => {let annotation = e.annotation;// let annotationIcon = `${Potree.resourcePath}/icons/annotation.svg`;// let parentID = this.annotationMapping.get(annotation.parent);// let annotationID = createNode(parentID, annotation.title, annotationIcon, annotation);// this.annotationMapping.set(annotation, annotationID);// annotation.addEventListener("annotation_changed", (e) => {// let annotationsRoot = $("#jstree_scene").jstree().get_json("annotations");// let jsonNode = annotationsRoot.children.find(child => child.data.uuid === annotation.uuid);// $.jstree.reference(jsonNode.id).rename_node(jsonNode.id, annotation.title);// });};// 相机动作let onCameraAnimationAdded = (e: any) => {const animation = e.animation;// const animationIcon = `${Potree.resourcePath}/icons/camera_animation.svg`;// createNode(otherID, "animation", animationIcon, animation);};// 向导图let onOrientedImagesAdded = (e: any) => {const images = e.images;// const imagesIcon = `${Potree.resourcePath}/icons/picture.svg`;// const node = createNode(imagesID, "images", imagesIcon, images);images.addEventListener("visibility_changed", () => {console.log('images.visible', images.visible)if (images.visible) {// tree.jstree('check_node', node);} else {// tree.jstree('uncheck_node', node);}});};// img 360let onImages360Added = (e: any) => {const images = e.images;// const imagesIcon = `${Potree.resourcePath}/icons/picture.svg`;// const node = createNode(imagesID, "360° images", imagesIcon, images);images.addEventListener("visibility_changed", () => {console.log('360images.visible', images.visible)if (images.visible) {// tree.jstree('check_node', node);} else {// tree.jstree('uncheck_node', node);}});};// 地质const onGeopackageAdded = (e: any) => {const geopackage = e.geopackage;// const geopackageIcon = `${Potree.resourcePath}/icons/triangle.svg`;// const tree = $(`#jstree_scene`);// const parentNode = "vectors";// for (const layer of geopackage.node.children) {// const name = layer.name;// let shpPointsID = tree.jstree('create_node', parentNode, {// "text": name,// "icon": geopackageIcon,// "object": layer,// "data": layer,// },// "last", false, false);// tree.jstree(layer.visible ? "check_node" : "uncheck_node", shpPointsID);// }};this.viewer.scene.addEventListener("pointcloud_added", onPointCloudAdded);this.viewer.scene.addEventListener("measurement_added", onMeasurementAdded);this.viewer.scene.addEventListener("profile_added", onProfileAdded);this.viewer.scene.addEventListener("volume_added", onVolumeAdded);this.viewer.scene.addEventListener("camera_animation_added", onCameraAnimationAdded);this.viewer.scene.addEventListener("oriented_images_added", onOrientedImagesAdded);this.viewer.scene.addEventListener("360_images_added", onImages360Added);this.viewer.scene.addEventListener("geopackage_added", onGeopackageAdded);this.viewer.scene.addEventListener("polygon_clip_volume_added", onVolumeAdded);this.viewer.scene.annotations.addEventListener("annotation_added", onAnnotationAdded);/*** 删除操作*/// let onMeasurementRemoved = (e) => {// let measurementsRoot = $("#jstree_scene").jstree().get_json("measurements");// let jsonNode = measurementsRoot.children.find(child => child.data.uuid === e.measurement.uuid);// tree.jstree("delete_node", jsonNode.id);// };// let onVolumeRemoved = (e) => {// let measurementsRoot = $("#jstree_scene").jstree().get_json("measurements");// let jsonNode = measurementsRoot.children.find(child => child.data.uuid === e.volume.uuid);// tree.jstree("delete_node", jsonNode.id);// };// let onPolygonClipVolumeRemoved = (e) => {// let measurementsRoot = $("#jstree_scene").jstree().get_json("measurements");// let jsonNode = measurementsRoot.children.find(child => child.data.uuid === e.volume.uuid);// tree.jstree("delete_node", jsonNode.id);// };// let onProfileRemoved = (e) => {// let measurementsRoot = $("#jstree_scene").jstree().get_json("measurements");// let jsonNode = measurementsRoot.children.find(child => child.data.uuid === e.profile.uuid);// tree.jstree("delete_node", jsonNode.id);// };// this.viewer.scene.addEventListener("measurement_removed", onMeasurementRemoved);// this.viewer.scene.addEventListener("volume_removed", onVolumeRemoved);// this.viewer.scene.addEventListener("polygon_clip_volume_removed", onPolygonClipVolumeRemoved);// this.viewer.scene.addEventListener("profile_removed", onProfileRemoved);// {// let annotationIcon = `${Potree.resourcePath}/icons/annotation.svg`;// this.annotationMapping = new Map();// this.annotationMapping.set(this.viewer.scene.annotations, annotationsID);// this.viewer.scene.annotations.traverseDescendants(annotation => {// let parentID = this.annotationMapping.get(annotation.parent);// let annotationID = createNode(parentID, annotation.title, annotationIcon, annotation);// this.annotationMapping.set(annotation, annotationID);// });// }const scene = this.viewer.scene;for (let pointcloud of scene.pointclouds) {onPointCloudAdded({ pointcloud: pointcloud });}for (let measurement of scene.measurements) {onMeasurementAdded({ measurement: measurement });}for (let volume of [...scene.volumes, ...scene.polygonClipVolumes]) {onVolumeAdded({ volume: volume });}for (let animation of scene.cameraAnimations) {onCameraAnimationAdded({ animation: animation });}for (let images of scene.orientedImages) {onOrientedImagesAdded({ images: images });}for (let images of scene.images360) {onImages360Added({ images: images });}for (const geopackage of scene.geopackages) {onGeopackageAdded({ geopackage: geopackage });}for (let profile of scene.profiles) {onProfileAdded({ profile: profile });}// {// createNode(otherID, "Camera", null, new Camera());// }this.viewer.addEventListener("scene_changed", (e: any) => {// propertiesPanel.setScene(e.scene);e.oldScene.removeEventListener("pointcloud_added", onPointCloudAdded);e.oldScene.removeEventListener("measurement_added", onMeasurementAdded);e.oldScene.removeEventListener("profile_added", onProfileAdded);e.oldScene.removeEventListener("volume_added", onVolumeAdded);e.oldScene.removeEventListener("polygon_clip_volume_added", onVolumeAdded);// e.oldScene.removeEventListener("measurement_removed", onMeasurementRemoved);e.scene.addEventListener("pointcloud_added", onPointCloudAdded);e.scene.addEventListener("measurement_added", onMeasurementAdded);e.scene.addEventListener("profile_added", onProfileAdded);e.scene.addEventListener("volume_added", onVolumeAdded);e.scene.addEventListener("polygon_clip_volume_added", onVolumeAdded);// e.scene.addEventListener("measurement_removed", onMeasurementRemoved);});}init() {this.initScene();}
}
参考学习:potree 使用手册
鸣谢作者;