一.RGB、Depth、bbox话题发送
1.新建一个二驱示例小车
路径为Robot-Jetbot(如果找不到也可以直接搜索Jetbot)
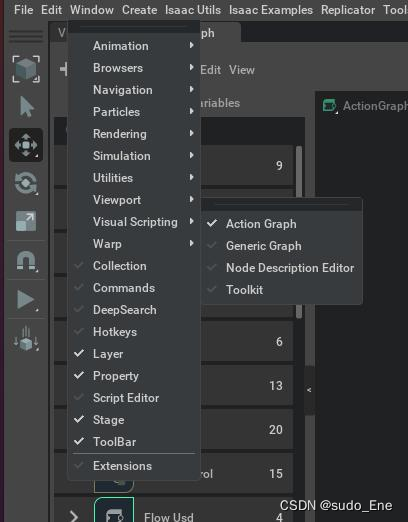
2.添加Action Graph
导航栏中:Window - Visual Scripting - Action Graph,建立一个工作区,这个工作区中主要是用来做键盘控制的。点击New Action Graph
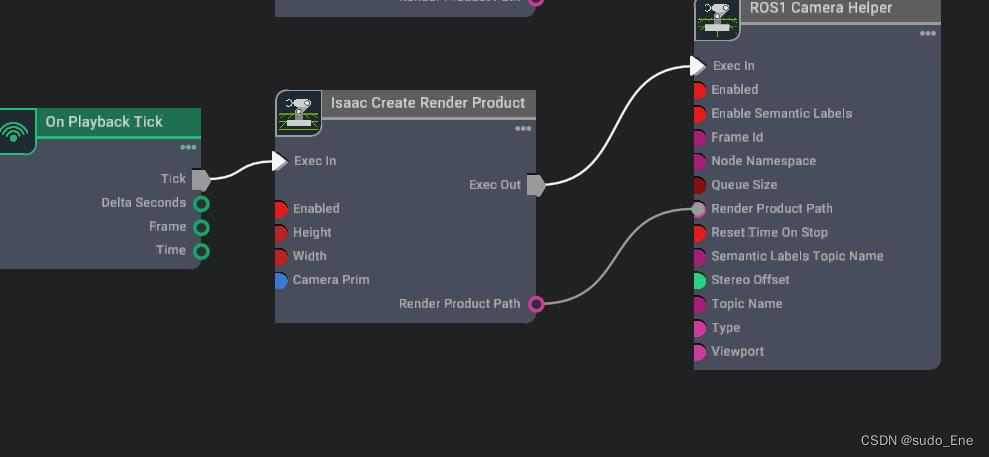
3.在左侧搜索栏中搜索:
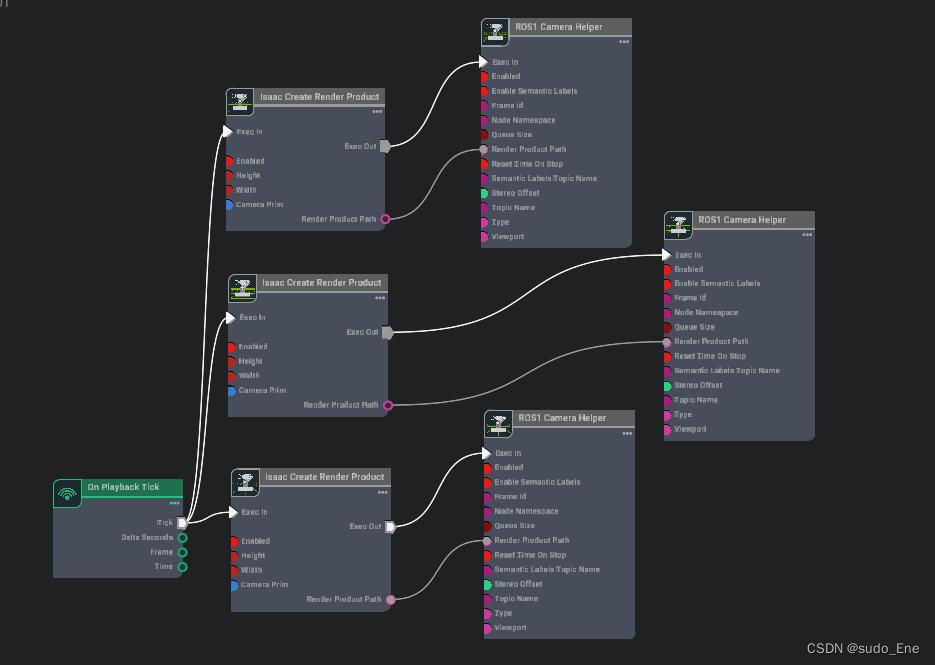
On Playback Tick、Isaac Create Render Product、ROS1 Camera Helper
按下图所示连接
4.在Isaac Create Render Product中设置相机路径

5.在对应ROS1 Camera Helper中设置话题名称、话题内容等
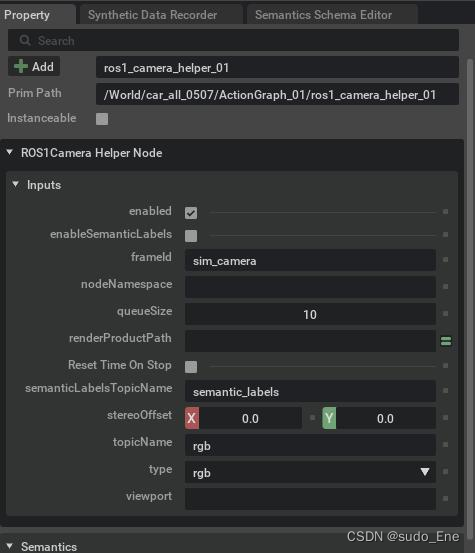
6.可以做很多个话题,一个相机只能发送一个话题,如果想发送多个话题,就需要多加几条一样的
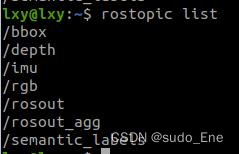
我信加了几个,我想传输bbox、depth、rgb
保存后用ros检查一下,先开启roscore,然后rostopic list,很好

二.Semantic_labels话题发送
1.设置类别
在建立完ros后,会自动出现一个Semantic Schema Editor,在里面可以设置物品的类别
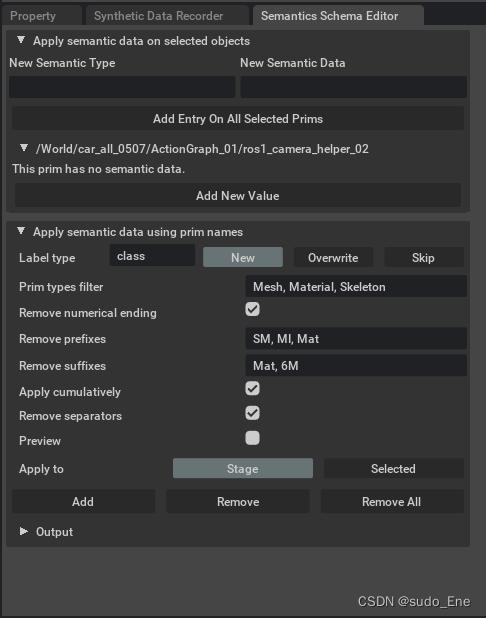
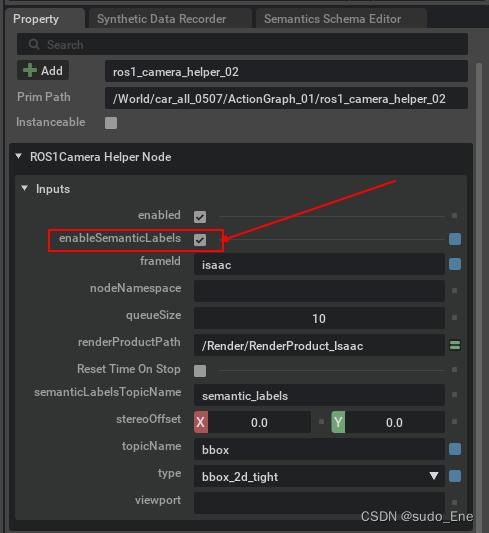
在发送话题时勾选enableSemanticLabels 就可以了
三. IMU话题发送
1.添加IMU
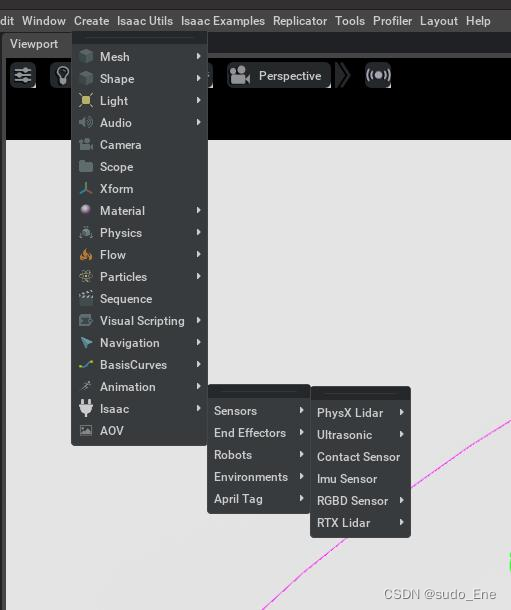
找到小车的主body,在上方导航栏中找到Imu Sensor,添加IMU
Create - Isaac - Sensors - Imu Sensor
2.连接IMU
放上去,这样连,在Isaac Read IMU Node中选择IMU路径,就不会变红了。
在Print Text中有“To Screen”,勾选后就可以在Viewport界面中看到imu信息了
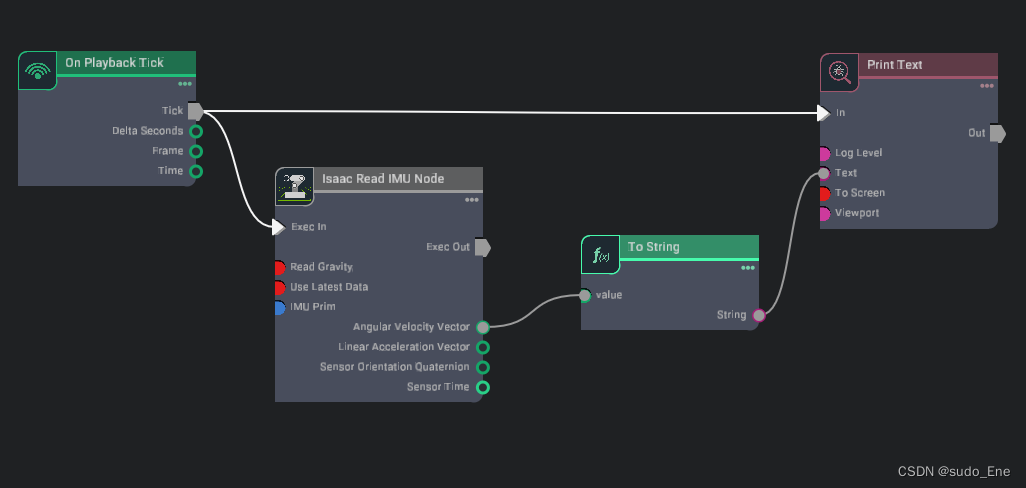
还没有发送ros话题
在搜索中找到ROS1 Publish Imu,将IMU Node的输出数据连接过去
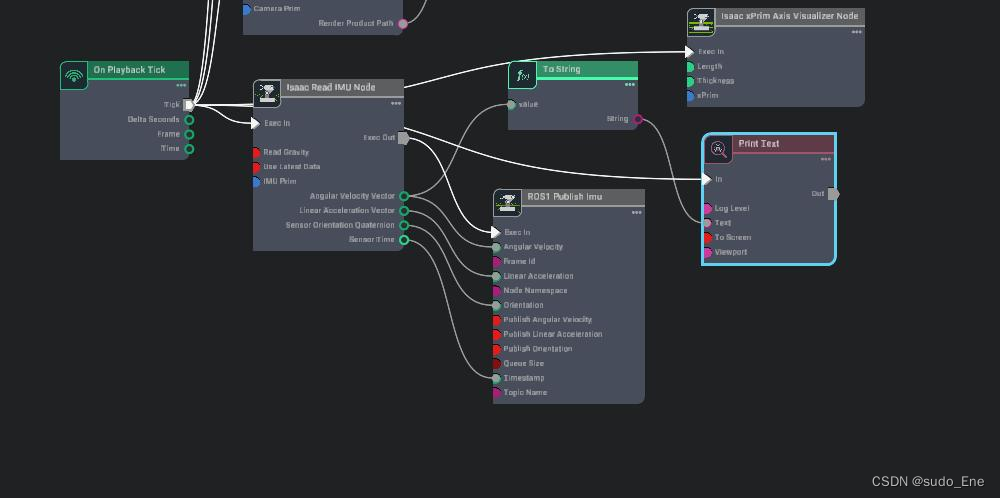
rostopic有imu了