前言
使用 ESPCN (Efficient Sub-Pixel CNN) 模型对低分辨率的图像,进行超分辨率处理。
效果展示
lowres 表示低分辨率图像,highres 表示高分辨率图像,prediction 表示模型预测的高分辨率图像,可以看出模型在生成高分辨率图像过程中确实发挥了作用。



PSNR of low resolution image and high resolution image is 25.4162
PSNR of predict and high resolution is 26.8309


PSNR of low resolution image and high resolution image is 24.5984
PSNR of predict and high resolution is 26.2234模型原理
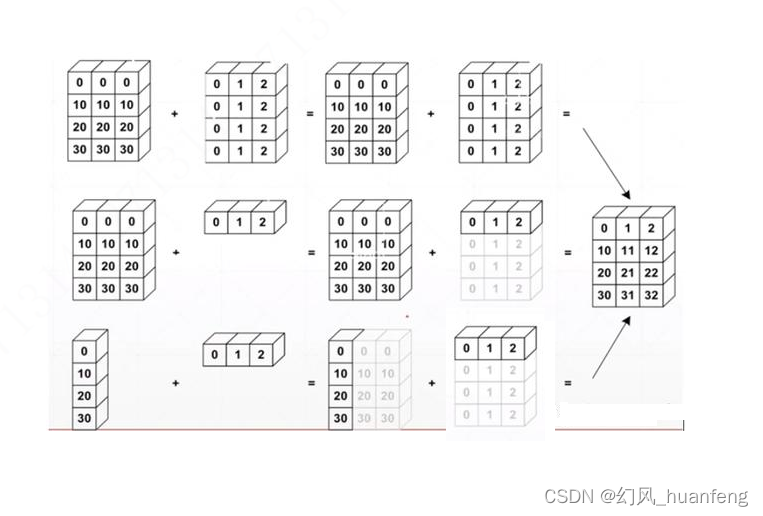
在 SRCNN 和 DRCN 中,低分辨率图像都是先通过上采样插值得到与高分辨率图像同样的大小再作为网络输入,这意味着卷积操作在较高的分辨率上进行,相比于在低分辨率的图像上计算卷积会降低效率。 ESPCN 提出一种在低分辨率图像上直接计算卷积得到高分辨率图像的高效率方法。

ESPCN 的核心概念是亚像素卷积层(sub-pixel convolutional layer)。如上图所示,网络的输入是原始低分辨率图像,通过若干卷积层以后,得到的特征图像大小与输入图像一样,但是特征通道为 r^2 。将每个像素的 r^2 个通道重新排列成一个 r x r 的区域,对应于高分辨率图像中的一个 r x r 大小的子块,从而大小为r^2 x H x W 的特征图像被重新排列成 1 x rH x rW 大小的高分辨率图像。这个变换虽然被称作 sub-pixel convolution , 但实际上并没有卷积操作。总之亚像素卷积层包含两个过程,分别是普通的卷积层和后面的排列像素的步骤。
通过使用 sub-pixel convolution , 图像从低分辨率到高分辨率放大的过程,插值函数被隐含地包含在前面的卷积层中,可以自动学习到。只在最后一层对图像大小做变换,前面的卷积运算由于在低分辨率图像上进行,因此效率会较高。
数据处理
- 我自己生成了一批数据,我这里是放在了
D:\pythonProject\HKYModel\data2目录之下。 - 因为数据集中已经分好了
训练集和测试集,所以直接使用函数进行本地数据的读取即可得到train_ds和valid_ds - 将
train_ds和valid_ds中的图片都做归一化操作
root_dir = "D:\pythonProject\HKYModel\BSR\BSDS500\data"
crop_size = 300
upscale_factor = 3
input_size = crop_size // upscale_factor
batch_size = 8
train_ds = image_dataset_from_directory(root_dir, batch_size=batch_size, image_size=(crop_size, crop_size), validation_split=0.2, subset="training", seed=1337, label_mode=None)
valid_ds = image_dataset_from_directory(root_dir, batch_size=batch_size, image_size=(crop_size, crop_size), validation_split=0.2, subset="validation", seed=1337, label_mode=None)
def scaling(input_image):input_image = input_image / 255.return input_image
train_ds = train_ds.map(scaling)
valid_ds = valid_ds.map(scaling)process_input函数接受输入图像和输入大小作为参数,并且将输入图像转换为YUV颜色空间。YUV 颜色空间包含了亮度(Y)和色度(U、V)信息。tf.image.rgb_to_yuv函数用于将 RGB 彩色图像转换为 YUV 颜色空间。接着确定最后一个维度的索引。这个索引被用来沿着颜色通道轴(通常是最后一个维度)拆分输入张量,得到 Y、U、V 三个通道的张量。我们从拆分后的张量中只提取亮度通道 Y,并使用tf.image.resize函数将其调整为指定的输入大小,调整大小的方法是"area"。process_target函数也是类似的,它也将输入图像转换为 YUV 颜色空间,并提取出亮度通道 Y。但不同的是,它并没有调整图像的大小,只是返回了亮度通道 Y。
dataset = os.path.join(root_dir, "images")
test_path = os.path.join(dataset, "test")
test_img_paths = sorted([os.path.join(test_path, fname) for fname in os.listdir(test_path) if fname.endswith(".jpg")])
def process_input(input, input_size):input = tf.image.rgb_to_yuv(input)last_dimension_axis = len(input.shape) - 1y, u, v = tf.split(input, 3, axis=last_dimension_axis)return tf.image.resize(y, [input_size, input_size], method="area")
def process_target(input):input = tf.image.rgb_to_yuv(input)last_dimension_axis = len(input.shape) - 1y, u, v = tf.split(input, 3, axis=last_dimension_axis)return y
train_ds = train_ds.map(lambda x: (process_input(x, input_size), process_target(x))).prefetch(buffer_size=32)
valid_ds = valid_ds.map(lambda x: (process_input(x, input_size), process_target(x))).prefetch(buffer_size=32)模型
-
DepthToSpace类继承自layers.Layer,表示一个深度转换空间的层,用于实现深度转换空间操作。get_config方法用于获取层的配置信息。这个方法被调用以保存层的配置,以便在需要序列化模型时可以重新创建相同的层实例。call方法实现了层的前向传播逻辑,在这个方法中,它接受一个输入张量input,然后执行深度转换空间操作。具体地,它首先获取输入张量的形状信息,然后按照block_size分块重排张量,并最终返回转换后的张量。 -
get_model函数用于创建一个 Keras 模型。在这个函数中,它接受两个参数:upscale_factor和channels。upscale_factor表示上采样因子,channels表示输入图像的通道数。在模型中,它使用了一系列的卷积层构建了一个深度卷积神经网络。然后,通过DepthToSpace层来实现深度转换空间操作,以实现图像的上采样。最后,通过keras.Model类构建了一个 Keras 模型,指定了输入和输出,返回了这个模型。
class DepthToSpace(layers.Layer):def __init__(self, block_size):super().__init__()self.block_size = block_sizedef get_config(self):config = super().get_config()config.update({"block_size": self.block_size})return configdef call(self, input):batch, height, width, depth = ops.shape(input)depth = depth // (self.block_size**2)x = ops.reshape(input, [batch, height, width, self.block_size, self.block_size, depth])x = ops.transpose(x, [0, 1, 3, 2, 4, 5])x = ops.reshape(x, [batch, height * self.block_size, width * self.block_size, depth])return x
def get_model(upscale_factor=3, channels=1):conv_args = {"activation": "relu", "kernel_initializer": "orthogonal", "padding": "same"}inputs = keras.Input(shape=(None, None, channels))x = layers.Conv2D(512, 5, **conv_args)(inputs)x = layers.Conv2D(256, 3, **conv_args)(x)x = layers.Conv2D(64, 3, **conv_args)(x)x = layers.Conv2D(channels * (upscale_factor**2), 3, **conv_args)(x)outputs = DepthToSpace(upscale_factor)(x)return keras.Model(inputs, outputs)训练
- 自定义回调函数类 ESPCNCallback ,在每个 epoch 开始时调用
on_epoch_begin方法,它初始化了一个列表self.psnr,用于存储每个 epoch 的峰值信噪比(PSNR)。在每个 epoch 结束时调用on_epoch_end方法。它计算了当前 epoch 的平均 PSNR ,并打印输出。每隔 20 个 epoch 就利用模型生成了一个预测图像,并通过plot_results函数绘制了这个预测图像,用于观察模型的生成效果。在每个测试集的 batch 结束时调用on_test_batch_end方法,它计算了当前 batch 的 PSNR ,并将其添加到self.psnr列表中。 - 另外创建了两个额外的 Keras 回调函数:
early_stopping_callback用于在训练过程中实施 early stopping 策略,如果在连续 5 个 epoch 中损失没有降低,则停止训练;model_checkpoint_callback用于在训练过程中保存模型的最佳参数。 - 使用 Adam 优化器和均方误差作为损失函数。
- 使用
model.fit函数进行模型的训练。指定了训练数据集train_ds,并设置了训练的 epochs 数目为 200,并且设置了之前定义的回调函数作为回调参数。
class ESPCNCallback(keras.callbacks.Callback):def __init__(self):super().__init__()self.test_img = get_lowres_image(load_img(test_img_paths[0]), upscale_factor)def on_epoch_begin(self, epoch, logs=None):self.psnr = []def on_epoch_end(self, epoch, logs=None):print("Mean PSNR for epoch: %.2f" % (np.mean(self.psnr)))if epoch % 20 == 0:prediction = upscale_image(self.model, self.test_img)plot_results(prediction, "epoch-" + str(epoch), "prediction")def on_test_batch_end(self, batch, logs=None):self.psnr.append(10 * math.log10(1 / logs["loss"]))early_stopping_callback = keras.callbacks.EarlyStopping(monitor="loss", patience=5)
model_checkpoint_callback = keras.callbacks.ModelCheckpoint(filepath="ESPCN/checkpoint.keras", save_weights_only=False, monitor="loss", mode="min", save_best_only=True, )
model = get_model(upscale_factor=upscale_factor, channels=1)
model.summary()
callbacks = [ESPCNCallback(), early_stopping_callback, model_checkpoint_callback]
model.compile(optimizer=keras.optimizers.Adam(learning_rate=0.001), loss=keras.losses.MeanSquaredError())
model.fit(train_ds, epochs=200, callbacks=callbacks, validation_data=valid_ds, verbose=2)日志打印:
Epoch 1/200
2024-03-06 16:14:17.804215: I tensorflow/stream_executor/cuda/cuda_dnn.cc:384] Loaded cuDNN version 8100
Mean PSNR for epoch: 22.44
50/50 - 5s - loss: 0.0226 - val_loss: 0.0058 - 5s/epoch - 105ms/step
Epoch 2/200
Mean PSNR for epoch: 23.57
50/50 - 1s - loss: 0.0064 - val_loss: 0.0043 - 1s/epoch - 21ms/step
...
Epoch 29/200
Mean PSNR for epoch: 26.75
50/50 - 1s - loss: 0.0025 - val_loss: 0.0022 - 996ms/epoch - 20ms/step
Epoch 30/200
Mean PSNR for epoch: 26.53
50/50 - 1s - loss: 0.0025 - val_loss: 0.0023 - 992ms/epoch - 20ms/step
Epoch 31/200
Mean PSNR for epoch: 26.18
50/50 - 1s - loss: 0.0025 - val_loss: 0.0023 - 987ms/epoch - 20ms/step那么,我们该如何学习大模型?
作为一名热心肠的互联网老兵,我决定把宝贵的AI知识分享给大家。 至于能学习到多少就看你的学习毅力和能力了 。我已将重要的AI大模型资料包括AI大模型入门学习思维导图、精品AI大模型学习书籍手册、视频教程、实战学习等录播视频免费分享出来。
一、大模型全套的学习路线
学习大型人工智能模型,如GPT-3、BERT或任何其他先进的神经网络模型,需要系统的方法和持续的努力。既然要系统的学习大模型,那么学习路线是必不可少的,下面的这份路线能帮助你快速梳理知识,形成自己的体系。
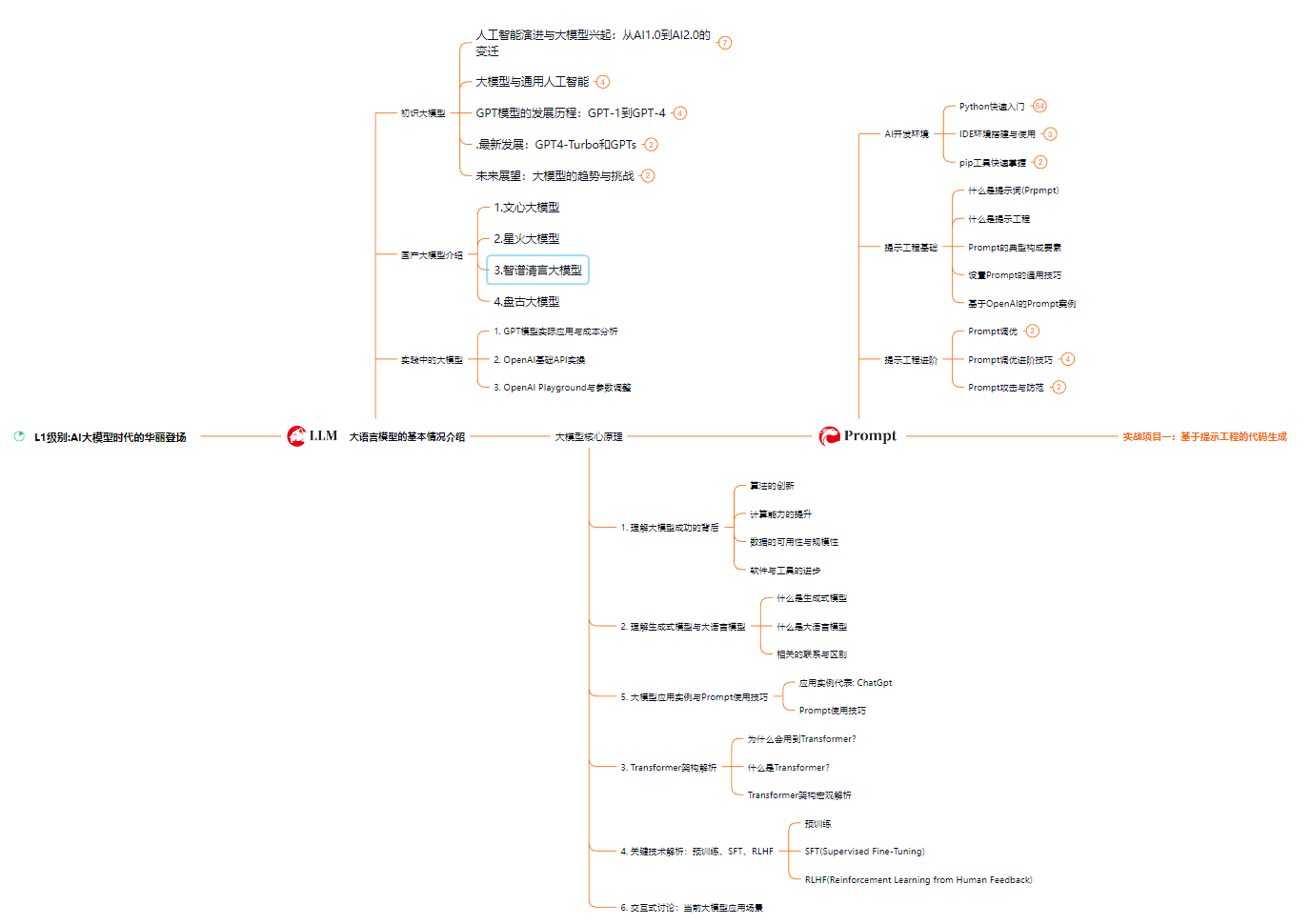
L1级别:AI大模型时代的华丽登场
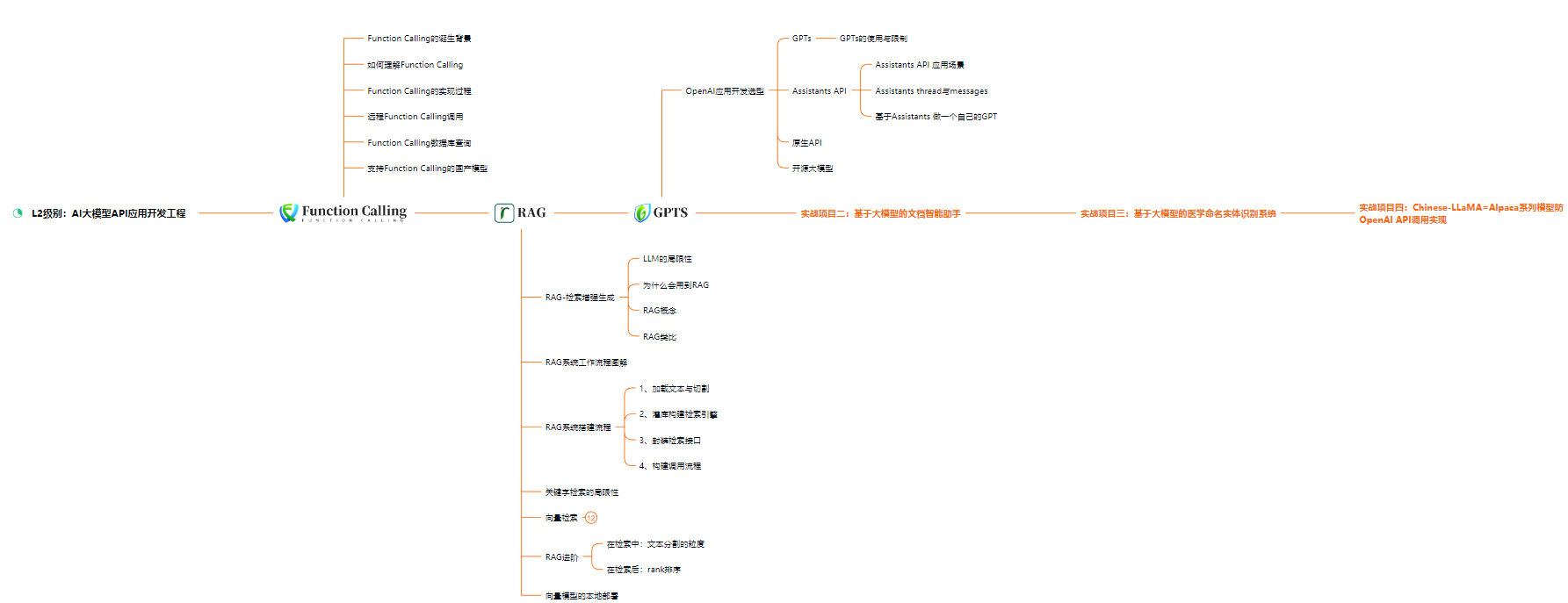
L2级别:AI大模型API应用开发工程
L3级别:大模型应用架构进阶实践

L4级别:大模型微调与私有化部署

一般掌握到第四个级别,市场上大多数岗位都是可以胜任,但要还不是天花板,天花板级别要求更加严格,对于算法和实战是非常苛刻的。建议普通人掌握到L4级别即可。
以上的AI大模型学习路线,不知道为什么发出来就有点糊,高清版可以微信扫描下方CSDN官方认证二维码免费领取【保证100%免费】
二、640套AI大模型报告合集
这套包含640份报告的合集,涵盖了AI大模型的理论研究、技术实现、行业应用等多个方面。无论您是科研人员、工程师,还是对AI大模型感兴趣的爱好者,这套报告合集都将为您提供宝贵的信息和启示。

三、大模型经典PDF籍
随着人工智能技术的飞速发展,AI大模型已经成为了当今科技领域的一大热点。这些大型预训练模型,如GPT-3、BERT、XLNet等,以其强大的语言理解和生成能力,正在改变我们对人工智能的认识。 那以下这些PDF籍就是非常不错的学习资源。
四、AI大模型商业化落地方案

作为普通人,入局大模型时代需要持续学习和实践,不断提高自己的技能和认知水平,同时也需要有责任感和伦理意识,为人工智能的健康发展贡献力量。

![[图解]建模相关的基础知识-05](https://img-blog.csdnimg.cn/direct/0ecb9518aba445f7afa2995a90de6268.png)