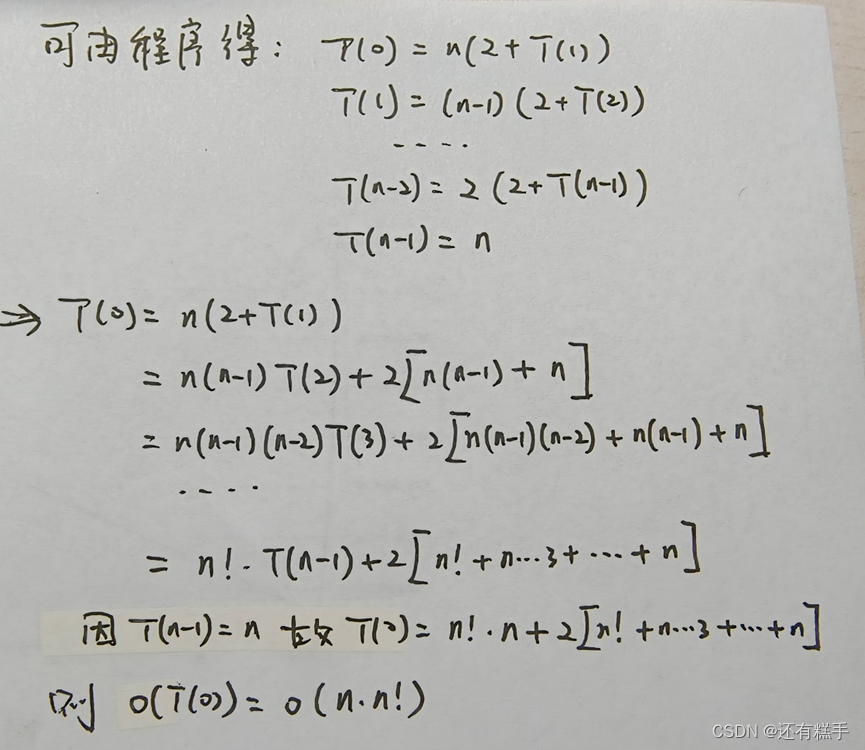
1.应用层如何操控PWM:
与 LED 设备一样, PWM 同样也是通过 sysfs 方式进行操控,进入到/sys/class/pwm 目录下 这里列举出了 8 个以 pwmchipX(X 表示数字 0~7)命名的文件夹,这八个文件夹其实就对应了 I.MX6U的 8 个 PWM 控制器, I.MX6U 总共有 8 个 PWM 控制器
这里列举出了 8 个以 pwmchipX(X 表示数字 0~7)命名的文件夹,这八个文件夹其实就对应了 I.MX6U的 8 个 PWM 控制器, I.MX6U 总共有 8 个 PWM 控制器
以其中一个为例,进入到 pwmchip0 目录下:

在这个目录下我们重点关注的是 export、 npwm 以及 unexport 这三个属性文件。
npwm: 这是一个只读属性,读取该文件可
echo 0 > /sys/class/pwm/pwmchip0/export #导出 PWM1
echo 0 > /sys/class/pwm/pwmchip1/export #导出 PWM2
echo 0 > /sys/class/pwm/pwmchip2/export #导出 PWM3
echo 0 > /sys/class/pwm/pwmchip3/export #导出 PWM4
echo 0 > /sys/class/pwm/pwmchip4/export #导出 PWM5
echo 0 > /sys/class/pwm/pwmchip5/export #导出 PWM6以得知该 PWM 控制器下共有几路 PWM 输出,如下所示:

I.MX6U 每个 PWM 控制器只有 1 路 PWM 输出,所以总共有 8 路 PWM,分别对应 I.MX6U 的PWM1~PWM8 这 8 路输出(pwmchip0 对应 PWM1, pwmchip1 对应 PWM2,以此类推,开发板出厂系统中, PWM1 已经被用作 LCD 背光控制了, 应用层不能直接对它进行控制了;而其它 PWM 均不能使用,原因在于 I/O 资源不够,为了满足板子上其它外设对 I/O 引脚的需求,取舍情况下只能如此! )
export: 与 GPIO 控制一样,在使用 PWM 之前,也需要将其导出,通过 export 属性进行导出,以下所示:
echo 0 > export
0 表示一个编号, 注意, 每个 PWM 控制器(pwmchipX)下,使用 export 属性文件导出 PWM 时,编号都是从 0 开始;因为 I.MX6U 每个控制器都只有一路 PWM,所以都只能使用编号 0
echo 0 > /sys/class/pwm/pwmchip0/export #导出 PWM1
echo 0 > /sys/class/pwm/pwmchip1/export #导出 PWM2
echo 0 > /sys/class/pwm/pwmchip2/export #导出 PWM3
echo 0 > /sys/class/pwm/pwmchip3/export #导出 PWM4
echo 0 > /sys/class/pwm/pwmchip4/export #导出 PWM5
echo 0 > /sys/class/pwm/pwmchip5/export #导出 PWM6| 导出成功后会在 pwmchipX(X 表示数字 0~7)目录下生成一个名为 pwm0 的目录 |
unexport: 将导出的 PWM 删除。当使用完 PWM 之后,我们需要将导出的 PWM 删除,
echo 0 > unexport写入到 unexport 文件中的编号与写入到 export 文件中的编号是相对应的;需要注意的是, export 文件和 unexport 文件都是只写的、没有读权限.
控制PWM:
通过 export 导出之后,便会生成 pwm0 这个目录,我们进入到该目录下看看:

我们重点关注 duty_cycle、 enable、 period 以及 polarity 这四个属性文件,
enable: 可读可写,写入"0"表示禁止 PWM;写入"1"表示使能 PWM。读取该文件获取 PWM 当前是禁止还是使能状态
echo 0 > enable #禁止 PWM 输出
echo 1 > enable #使能 PWM 输出| 通常配置好 PWM 之后, 再使能 PWM。 |
polarity: 用于设置极性,可读可写,可写入的值如下
"normal":普通; "inversed":反转;
echo normal > polarity #默认极性
echo inversed > polarity #极性反转很多SoC 的 PWM 外设其硬件上并不支持极性配置,所以对应的驱动程序中并未实现这个接口,应用层自然也就无法通过 polarity 属性文件对 PWM 极性进行配置, ALPHA/Mini I.MX6U 开发板出厂系统便是这样子
period: 用于配置 PWM 周期, 可读可写;写入一个字符串数字值,以 ns(纳秒)为单位,譬如配置 PWM 周期为 10us(微秒):
echo 10000 > period #PWM 周期设置为 10us(10 * 1000ns)duty_cycle: 用于配置 PWM 的占空比, 可读可写;写入一个字符串数字值, 同样也是以 ns 为单位:
echo 5000 > duty_cycle #PWM 占空比设置为 5us例程:
#include <stdio.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
static char pwm_path[100];
static int pwm_config(const char *attr, const char *val)
{
char file_path[100];
int len;
int fd;
sprintf(file_path, "%s/%s", pwm_path, attr);
if (0 > (fd = open(file_path, O_WRONLY))) {
perror("open error");
return fd;
}
len = strlen(val);
if (len != write(fd, val, len)) {
perror("write error");
close(fd);
return -1;
}
close(fd); //关闭文件
return 0;
}
int main(int argc, char *argv[])
{
/* 校验传参 */
if (4 != argc) {
fprintf(stderr, "usage: %s <id> <period> <duty>\n",
argv[0]);
exit(-1);
}
/* 打印配置信息 */
printf("PWM config: id<%s>, period<%s>, duty<%s>\n",
argv[1], argv[2],
argv[3]);
/* 导出 pwm */
sprintf(pwm_path, "/sys/class/pwm/pwmchip%s/pwm0", argv[1]);
if (access(pwm_path, F_OK)) {//如果 pwm0 目录不存在, 则导出
char temp[100];
int fd;
sprintf(temp, "/sys/class/pwm/pwmchip%s/export", argv[1]);
if (0 > (fd = open(temp, O_WRONLY))) {
perror("open error");
exit(-1);
}
if (1 != write(fd, "0", 1)) {//导出 pwm
perror("write error");
close(fd);
exit(-1);
}
close(fd); //关闭文件
}
/* 配置 PWM 周期 */
if (pwm_config("period", argv[2]))
exit(-1);
/* 配置占空比 */
if (pwm_config("duty_cycle", argv[3]))
exit(-1);
/* 使能 pwm */
pwm_config("enable", "1");
/* 退出程序 */
exit(0);
} main()函数中,首先对传参进行校验,执行该应用程序的时候需要用户传入 3 个参数,分别是编号(0、1、 2、 3 等,分别表示 I.MX6U 的 PWM1、 PWM2、 PWM3…)、周期(以 ns 为单位)、 PWM 占空比(以ns 为单位) 。 譬如
./testApp 0 500000 250000下来需要导出 pwm,首先使用 access()函数判断 pwm0 目录是否存在,如果存在表示 pwm 已经导出,如果不存在,则表示未导出,那么就需要通过 export 文件将其导出。
导出成功之后,接着配置 PWM 周期、占空比,最后使能 PWM。
,前面提到,这块imx6ull的pwm1拿去用做控制lcd背光了,而其他几路没有pwm资源,所有测不了,如果要测试pwm需要去内核禁用io,太麻烦,所以不演示了