MedMamba原理和用于糖尿病视网膜病变检测尝试
1.MedMamba原理
MedMamba发表于2024.9.28,是构建在Vision Mamba基础之上,融合了卷积神经网的架构,结构如下图:
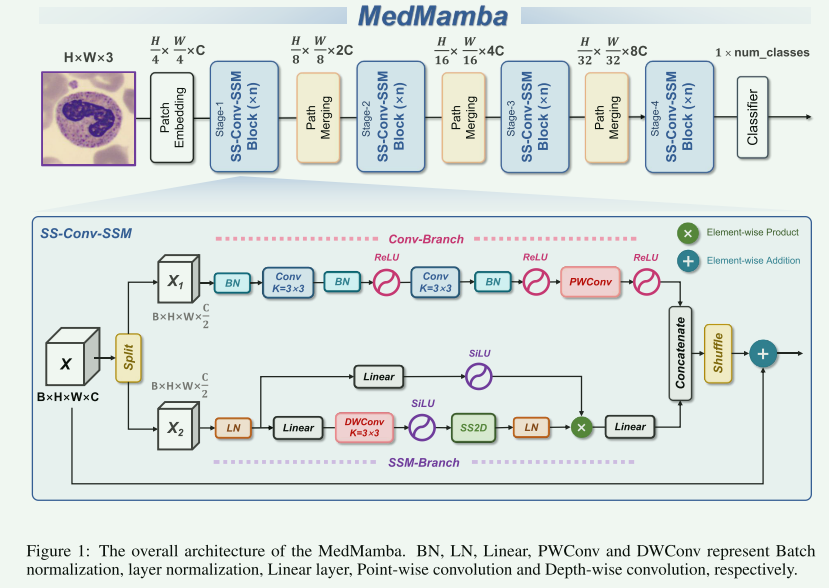
原理简述就是图片输入后按通道输入后切分为两部分,一部分走二维分组卷积提取局部特征,一部分利用Vision Mamba中的SS2D模块提取所谓的全局特征,两个分支的输出通过通道维度的拼接后,经过channel shuffle增加信息融合。
2.代码解释
模型代码就在源码的MedMamba.py文件下,对涉及到的代码我进行了详细注释:
-
mamba部分
基本上是使用Vision Mamaba的SS2D:
class SS2D(nn.Module):def __init__(self,d_model,d_state=16,# d_state="auto", # 20240109d_conv=3,expand=2,dt_rank="auto",dt_min=0.001,dt_max=0.1,dt_init="random",dt_scale=1.0,dt_init_floor=1e-4,dropout=0.,conv_bias=True,bias=False,device=None,dtype=None,**kwargs,):# 设置设备和数据类型的关键参数factory_kwargs = {"device": device, "dtype": dtype}super().__init__()self.d_model = d_model # 模型维度self.d_state = d_state # 状态维度# self.d_state = math.ceil(self.d_model / 6) if d_state == "auto" else d_model # 20240109self.d_conv = d_conv # 卷积核的大小self.expand = expand # 扩展因子self.d_inner = int(self.expand * self.d_model) # 内部维度,等于模型维度乘以扩展因子# 时间步长的秩,默认为模型维度除以16self.dt_rank = math.ceil(self.d_model / 16) if dt_rank == "auto" else dt_rank# 输入投影层,将模型维度投影到内部维度的两倍,用于后续操作self.in_proj = nn.Linear(self.d_model, self.d_inner * 2, bias=bias, **factory_kwargs)# 深度卷积层,输入和输出通道数相同,组数等于内部维度,用于空间特征提取self.conv2d = nn.Conv2d(in_channels=self.d_inner,out_channels=self.d_inner,groups=self.d_inner,bias=conv_bias,kernel_size=d_conv,padding=(d_conv - 1) // 2, # 保证输出的空间维度与输入相同**factory_kwargs,)self.act = nn.SiLU() # 激活函数使用 SiLU# 定义多个线性投影层,将内部维度投影到不同大小的向量,用于时间步长和状态self.x_proj = (nn.Linear(self.d_inner, (self.dt_rank + self.d_state * 2), bias=False, **factory_kwargs), nn.Linear(self.d_inner, (self.dt_rank + self.d_state * 2), bias=False, **factory_kwargs), nn.Linear(self.d_inner, (self.dt_rank + self.d_state * 2), bias=False, **factory_kwargs), nn.Linear(self.d_inner, (self.dt_rank + self.d_state * 2), bias=False, **factory_kwargs), )# 将四个线性投影层的权重合并为一个参数,方便计算self.x_proj_weight = nn.Parameter(torch.stack([t.weight for t in self.x_proj], dim=0)) # (K=4, N, inner)# 删除单独的投影层以节省内存del self.x_proj# 初始化时间步长的线性投影,定义四组时间步长投影参数self.dt_projs = (self.dt_init(self.dt_rank, self.d_inner, dt_scale, dt_init, dt_min, dt_max, dt_init_floor, **factory_kwargs),self.dt_init(self.dt_rank, self.d_inner, dt_scale, dt_init, dt_min, dt_max, dt_init_floor, **factory_kwargs),self.dt_init(self.dt_rank, self.d_inner, dt_scale, dt_init, dt_min, dt_max, dt_init_floor, **factory_kwargs),self.dt_init(self.dt_rank, self.d_inner, dt_scale, dt_init, dt_min, dt_max, dt_init_floor, **factory_kwargs),)# 将时间步长的权重和偏置参数合并为可训练参数self.dt_projs_weight = nn.Parameter(torch.stack([t.weight for t in self.dt_projs], dim=0)) # (K=4, inner, rank)self.dt_projs_bias = nn.Parameter(torch.stack([t.bias for t in self.dt_projs], dim=0)) # (K=4, inner)del self.dt_projs# 初始化 S4D 的 A 参数,用于状态更新计算self.A_logs = self.A_log_init(self.d_state, self.d_inner, copies=4, merge=True) # (K=4, D, N)# 初始化 D 参数,用于跳跃连接的计算self.Ds = self.D_init(self.d_inner, copies=4, merge=True) # (K=4, D, N)# 选择核心的前向计算函数版本,默认为 forward_corev0# self.selective_scan = selective_scan_fnself.forward_core = self.forward_corev0# 输出层的层归一化,归一化到内部维度self.out_norm = nn.LayerNorm(self.d_inner)# 输出投影层,将内部维度投影回原始模型维度self.out_proj = nn.Linear(self.d_inner, self.d_model, bias=bias, **factory_kwargs)# 设置 dropout 层,如果 dropout 参数大于 0,则应用随机失活以防止过拟合self.dropout = nn.Dropout(dropout) if dropout > 0. else None@staticmethoddef dt_init(dt_rank, d_inner, dt_scale=1.0, dt_init="random", dt_min=0.001, dt_max=0.1, dt_init_floor=1e-4, **factory_kwargs):dt_proj = nn.Linear(dt_rank, d_inner, bias=True, **factory_kwargs)# 初始化用于时间步长计算的线性投影层# Initialize special dt projection to preserve variance at initialization# 特殊初始化方法,用于保持初始化时的方差不变dt_init_std = dt_rank**-0.5 * dt_scaleif dt_init == "constant": # 初始化为常数nn.init.constant_(dt_proj.weight, dt_init_std)elif dt_init == "random": # 初始化为均匀随机数nn.init.uniform_(dt_proj.weight, -dt_init_std, dt_init_std)else:raise NotImplementedError# Initialize dt bias so that F.softplus(dt_bias) is between dt_min and dt_max# 初始化偏置,以便在使用 F.softplus 时,结果处于 dt_min 和 dt_max 之间dt = torch.exp(torch.rand(d_inner, **factory_kwargs) * (math.log(dt_max) - math.log(dt_min))+ math.log(dt_min)).clamp(min=dt_init_floor)# Inverse of softplus: https://github.com/pytorch/pytorch/issues/72759# softplus 的逆操作,确保偏置初始化在合适范围内inv_dt = dt + torch.log(-torch.expm1(-dt))with torch.no_grad():dt_proj.bias.copy_(inv_dt) # 设置偏置参数# Our initialization would set all Linear.bias to zero, need to mark this one as _no_reinitdt_proj.bias._no_reinit = True # 将该偏置标记为不重新初始化return dt_proj
-
SS_Conv_SSM
这部分就是论文提出的创新点,图片中的结构
class SS_Conv_SSM(nn.Module):def __init__(self,hidden_dim: int = 0,drop_path: float = 0,norm_layer: Callable[..., torch.nn.Module] = partial(nn.LayerNorm, eps=1e-6),attn_drop_rate: float = 0,d_state: int = 16,**kwargs,):super().__init__()# 初始化第一个归一化层,归一化的维度是隐藏维度的一半self.ln_1 = norm_layer(hidden_dim//2)# 初始化自注意力模块 SS2D,输入维度为隐藏维度的一半self.self_attention = SS2D(d_model=hidden_dim//2,dropout=attn_drop_rate,d_state=d_state,**kwargs)# DropPath 层,用于随机丢弃路径,提高模型的泛化能力self.drop_path = DropPath(drop_path)# 定义卷积模块,由多个卷积层和批量归一化层组成,用于特征提取self.conv33conv33conv11 = nn.Sequential(nn.BatchNorm2d(hidden_dim // 2),nn.Conv2d(in_channels=hidden_dim//2,out_channels=hidden_dim//2,kernel_size=3,stride=1,padding=1),nn.BatchNorm2d(hidden_dim//2),nn.ReLU(),nn.Conv2d(in_channels=hidden_dim // 2, out_channels=hidden_dim // 2, kernel_size=3, stride=1, padding=1),nn.BatchNorm2d(hidden_dim // 2),nn.ReLU(),nn.Conv2d(in_channels=hidden_dim // 2, out_channels=hidden_dim // 2, kernel_size=1, stride=1),nn.ReLU())# 注释掉的最终卷积层,可能用于进一步调整输出维度# self.finalconv11 = nn.Conv2d(in_channels=hidden_dim, out_channels=hidden_dim, kernel_size=1, stride=1)def forward(self, input: torch.Tensor):# 将输入张量沿最后一个维度分割为左右两部分input_left, input_right = input.chunk(2,dim=-1)# 对右侧输入进行归一化和自注意力操作,之后应用 DropPath 随机丢弃x = self.drop_path(self.self_attention(self.ln_1(input_right)))# 将左侧输入从 (batch_size, height, width, channels)# 转换为 (batch_size, channels, height, width) 以适应卷积操作input_left = input_left.permute(0,3,1,2).contiguous()input_left = self.conv33conv33conv11(input_left)# 将卷积后的左侧输入转换回原来的形状 (batch_size, height, width, channels)input_left = input_left.permute(0,2,3,1).contiguous()# 将左侧和右侧的输出在最后一个维度上拼接起来output = torch.cat((input_left,x),dim=-1)# 对拼接后的输出进行通道混洗,增加特征的融合output = channel_shuffle(output,groups=2)# 返回最终的输出,增加残差连接,将输入与输出相加return output+input -
VSSLayer
有以上结构堆叠构成网络结构
class VSSLayer(nn.Module):""" A basic Swin Transformer layer for one stage.Args:dim (int): Number of input channels.depth (int): Number of blocks.drop (float, optional): Dropout rate. Default: 0.0attn_drop (float, optional): Attention dropout rate. Default: 0.0drop_path (float | tuple[float], optional): Stochastic depth rate. Default: 0.0norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNormdownsample (nn.Module | None, optional): Downsample layer at the end of the layer. Default: Noneuse_checkpoint (bool): Whether to use checkpointing to save memory. Default: False."""def __init__(self, dim, depth, attn_drop=0.,drop_path=0., norm_layer=nn.LayerNorm, downsample=None, use_checkpoint=False, d_state=16,**kwargs,):super().__init__()# 设置输入通道数self.dim = dim# 是否使用检查点self.use_checkpoint = use_checkpoint# 创建 SS_Conv_SSM 块列表,数量为 depthself.blocks = nn.ModuleList([SS_Conv_SSM(hidden_dim=dim, # 隐藏层维度等于输入维度# 处理随机深度的丢弃率drop_path=drop_path[i] if isinstance(drop_path, list) else drop_path,norm_layer=norm_layer, # 使用的归一化层attn_drop_rate=attn_drop, # 注意力丢弃率d_state=d_state, # 状态维度)for i in range(depth)]) # 重复 depth 次构建块# 初始化权重 (暂时没有真正初始化,可能在后续被重写)# 确保这一初始化应用于模型 (在 VSSM 中被覆盖)if True: # is this really applied? Yes, but been overriden later in VSSM!# 对每个模块的参数进行初始化def _init_weights(module: nn.Module):for name, p in module.named_parameters():if name in ["out_proj.weight"]:# 克隆并分离参数 p,用于保持随机数种子一致p = p.clone().detach_() # fake init, just to keep the seed ....# 使用 Kaiming 均匀初始化方法nn.init.kaiming_uniform_(p, a=math.sqrt(5))# 应用初始化函数到整个模型self.apply(_init_weights)# 如果提供了下采样层,则使用该层,否则设置为 Noneif downsample is not None:self.downsample = downsample(dim=dim, norm_layer=norm_layer)else:self.downsample = Nonedef forward(self, x):# 逐块应用 SS_Conv_SSM 模块for blk in self.blocks:# 如果使用检查点,则通过检查点执行前向传播,节省内存if self.use_checkpoint:x = checkpoint.checkpoint(blk, x)else:# 否则直接进行前向传播x = blk(x)# 如果存在下采样层,则应用下采样层if self.downsample is not None:x = self.downsample(x)# 返回最终的输出张量return x -
最终的网络模型类
class VSSM(nn.Module):def __init__(self, patch_size=4, in_chans=3, num_classes=1000, depths=[2, 2, 4, 2], depths_decoder=[2, 9, 2, 2],dims=[96,192,384,768], dims_decoder=[768, 384, 192, 96], d_state=16, drop_rate=0., attn_drop_rate=0., drop_path_rate=0.1,norm_layer=nn.LayerNorm, patch_norm=True,use_checkpoint=False, **kwargs):super().__init__()self.num_classes = num_classes # 设置分类的类别数目self.num_layers = len(depths) # 设置层的数量,即编码器层的数量# 如果 dims 是一个整数,则自动扩展为一个包含每一层维度的列表if isinstance(dims, int):dims = [int(dims * 2 ** i_layer) for i_layer in range(self.num_layers)]self.embed_dim = dims[0] # 嵌入维度等于第一层的维度self.num_features = dims[-1] # 特征维度等于最后一层的维度self.dims = dims # 记录每一层的维度# 初始化补丁嵌入模块,将输入图像分割成补丁并进行线性投影self.patch_embed = PatchEmbed2D(patch_size=patch_size, in_chans=in_chans, embed_dim=self.embed_dim,norm_layer=norm_layer if patch_norm else None)# WASTED absolute position embedding ======================# 是否使用绝对位置编码,默认情况下不使用self.ape = False# self.ape = False# drop_rate = 0.0# 如果使用绝对位置编码,则初始化位置编码参数if self.ape:self.patches_resolution = self.patch_embed.patches_resolution# 创建位置编码的可训练参数,并进行截断正态分布初始化self.absolute_pos_embed = nn.Parameter(torch.zeros(1, *self.patches_resolution, self.embed_dim))trunc_normal_(self.absolute_pos_embed, std=.02)# 位置编码的 Dropout 层self.pos_drop = nn.Dropout(p=drop_rate)# 使用线性函数生成每层的随机深度丢弃率dpr = [x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))] # 随机深度衰减规则# 解码器部分的随机深度衰减dpr_decoder = [x.item() for x in torch.linspace(0, drop_path_rate, sum(depths_decoder))][::-1]# 初始化编码器的层列表self.layers = nn.ModuleList()for i_layer in range(self.num_layers): # 创建每一层的 VSSLayerlayer = VSSLayer(dim=dims[i_layer], # 输入维度depth=depths[i_layer], # 当前层包含的块数量d_state=math.ceil(dims[0] / 6) if d_state is None else d_state, # 状态维度drop=drop_rate, # Dropout率attn_drop=attn_drop_rate, # 注意力 Dropout率# 当前层的随机深度丢弃率drop_path=dpr[sum(depths[:i_layer]):sum(depths[:i_layer + 1])],# 归一化层类型norm_layer=norm_layer,# 下采样层,最后一层不进行下采样downsample=PatchMerging2D if (i_layer < self.num_layers - 1) else None,# 是否使用检查点技术节省内存use_checkpoint=use_checkpoint,)# 将层添加到层列表中self.layers.append(layer)# self.norm = norm_layer(self.num_features)# 平均池化层,用于将特征池化为单个值self.avgpool = nn.AdaptiveAvgPool2d(1)# 分类头部,使用线性层将特征映射到类别数目self.head = nn.Linear(self.num_features, num_classes) if num_classes > 0 else nn.Identity()# 初始化模型权重self.apply(self._init_weights)# 对模型中的卷积层进行 Kaiming 正态分布初始化for m in self.modules():if isinstance(m, nn.Conv2d):nn.init.kaiming_normal_(m.weight, mode='fan_out', nonlinearity='relu')def _init_weights(self, m: nn.Module):"""out_proj.weight which is previously initilized in SS_Conv_SSM, would be cleared in nn.Linearno fc.weight found in the any of the model parametersno nn.Embedding found in the any of the model parametersso the thing is, SS_Conv_SSM initialization is uselessConv2D is not intialized !!!"""# 对线性层和归一化层进行权重初始化if isinstance(m, nn.Linear):# 对线性层的权重使用截断正态分布初始化trunc_normal_(m.weight, std=.02)# 如果存在偏置,则将其初始化为 0if isinstance(m, nn.Linear) and m.bias is not None:nn.init.constant_(m.bias, 0)elif isinstance(m, nn.LayerNorm):# 对 LayerNorm 层的偏置和权重初始化nn.init.constant_(m.bias, 0)nn.init.constant_(m.weight, 1.0)@torch.jit.ignoredef no_weight_decay(self):# 返回不需要权重衰减的参数名return {'absolute_pos_embed'}@torch.jit.ignoredef no_weight_decay_keywords(self):# 返回不需要权重衰减的关键字return {'relative_position_bias_table'}def forward_backbone(self, x):# 使用补丁嵌入模块处理输入张量x = self.patch_embed(x)if self.ape:# 如果使用绝对位置编码,则将位置编码加到输入特征上x = x + self.absolute_pos_embed# 位置编码之后应用 Dropoutx = self.pos_drop(x)# 逐层通过编码器层for layer in self.layers:x = layer(x)return xdef forward(self, x):# 通过骨干网络提取特征x = self.forward_backbone(x)# 变换维度以适应池化操x = x.permute(0,3,1,2)# 使用自适应平均池化将特征降维x = self.avgpool(x)# 展平成一个向量x = torch.flatten(x,start_dim=1)# 通过分类头进行最终的类别预测x = self.head(x)return x作者在原文中尝试了大中小三个不同的参数版本
medmamba_t = VSSM(depths=[2, 2, 4, 2],dims=[96,192,384,768],num_classes=6).to("cuda") medmamba_s = VSSM(depths=[2, 2, 8, 2],dims=[96,192,384,768],num_classes=6).to("cuda") medmamba_b = VSSM(depths=[2, 2, 12, 2],dims=[128,256,512,1024],num_classes=6).to("cuda")总体论文原理比较简单,但是论文实验做得很扎实,感兴趣查看原文。
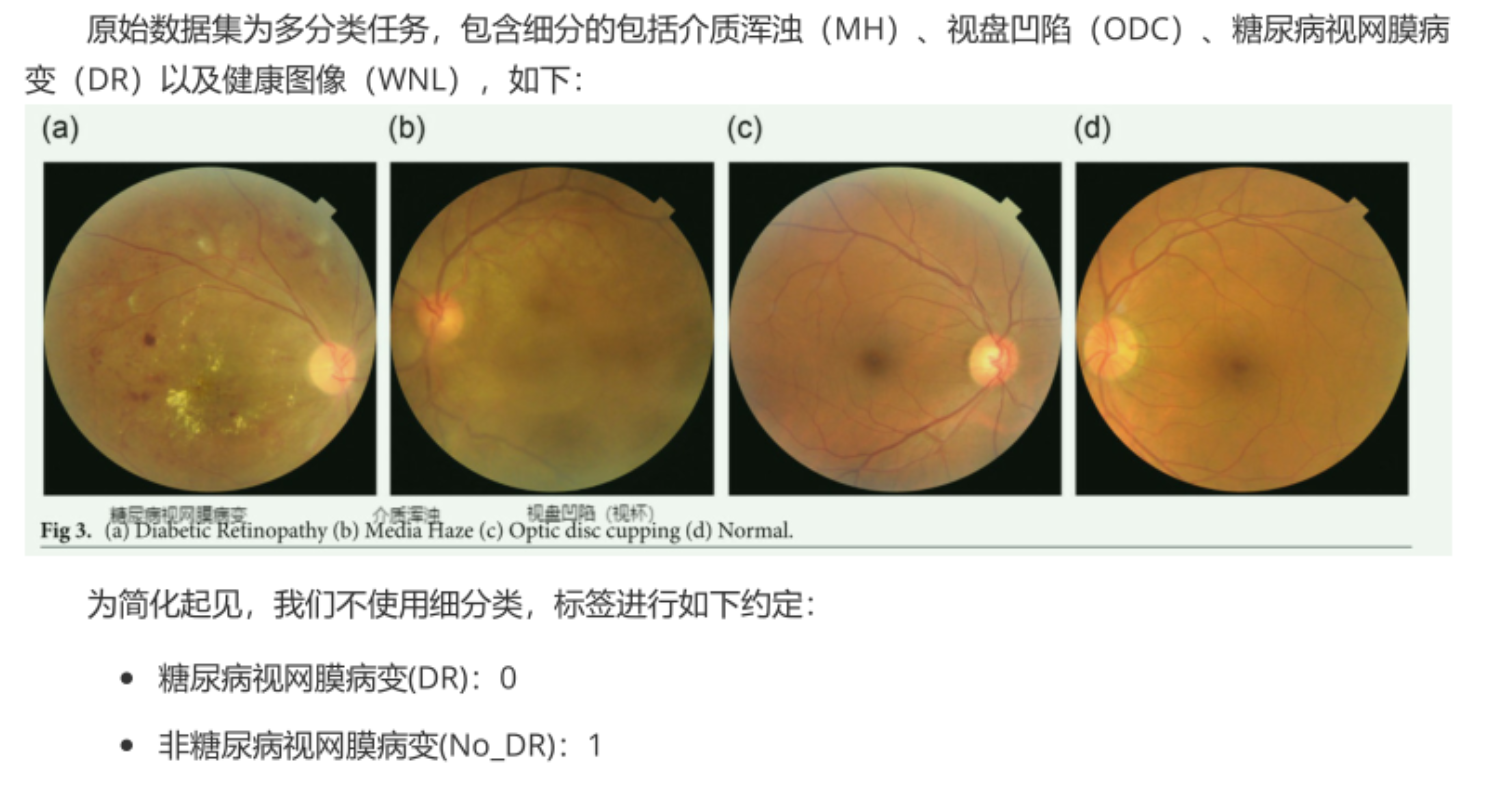
3.在糖尿病视网膜数据上实验一下效果
数据集情况
采用开源的retino_data糖尿病视网膜病变数据集:
环境安装
这部分主要是vision mamba的环境安装不要出错,参考官方Github会有问题:
-
Python 3.10.13
conda create -n vim python=3.10.13
-
torch 2.1.1 + cu118
pip install torch==2.1.1 torchvision==0.16.1 torchaudio==2.1.1 --index-url https://download.pytorch.org/whl/cu118
-
Requirements: vim_requirements.txt
pip install -r vim/vim_requirements.txt
wget https://github.com/Dao-AILab/causal-conv1d/releases/download/v1.1.3.post1/causal_conv1d-1.1.3.post1+cu118torch2.1cxx11abiFALSE-cp310-cp310-linux_x86_64.whl
wget https://github.com/state-spaces/mamba/releases/download/v1.1.1/mamba_ssm-1.1.1+cu118torch2.1cxx11abiFALSE-cp310-cp310-linux_x86_64.whl
-
pip install causal_conv1d-1.1.3.post1+cu118torch2.1cxx11abiFALSE-cp310-cp310-linux_x86_64.whl
-
pip install mamba_ssm-1.1.1+cu118torch2.1cxx11abiFALSE-cp310-cp310-linux_x86_64.whl
-
然后用官方项目里的mamba_ssm替换安装在conda环境里的mamba_ssm
-
用conda env list 查看刚才安装的mamba环境的路径,我的mamba环境在/home/aic/anaconda3/envs/vim
-
用官方项目里的mamba_ssm替换安装在conda环境里的mamba_ssm
cp -rf mamba-1p1p1/mamba_ssm /home/aic/anaconda3/envs/vim/lib/python3.10/site-packages
-
代码编写
编写一个检查数据集均值和方差的代码,不用Imagenet的:
# -*- coding: utf-8 -*-
# 作者: cskywit
# 文件名: mean_std.py
# 创建时间: 2024-10-07
# 文件描述:计算数据集的均值和方差# 导入必要的库
from torchvision.datasets import ImageFolder
import torch
from torchvision import transforms# 定义函数get_mean_and_std,用于计算训练数据集的均值和标准差
def get_mean_and_std(train_data):# 创建DataLoader,用于批量加载数据train_loader = torch.utils.data.DataLoader(train_data, batch_size=1, shuffle=False, num_workers=0,pin_memory=True)# 初始化均值和标准差mean = torch.zeros(3)std = torch.zeros(3)# 遍历数据集中的每个批次for X, _ in train_loader:# 遍历RGB三个通道for d in range(3):# 计算每个通道的均值和标准差mean[d] += X[:, d, :, :].mean()std[d] += X[:, d, :, :].std()# 计算最终的均值和标准差mean.div_(len(train_data))std.div_(len(train_data))# 返回均值和标准差列表return list(mean.numpy()), list(std.numpy())# 判断是否为主程序
if __name__ == '__main__':root_path = '/home/aic/deep_learning_data/retino_data/train'# 使用ImageFolder加载训练数据集train_dataset = ImageFolder(root=root_path, transform=transforms.ToTensor())# 打印训练数据集的均值和标准差print(get_mean_and_std(train_dataset))# ([0.41586006, 0.22244255, 0.07565845],# [0.23795983, 0.13206834, 0.05284985])
然后编写train
# -*- coding: utf-8 -*-
# 作者: cskywit
# 文件名: train_DR.py
# 创建时间: 2024-10-10
# 文件描述:
import torch
import torch.nn as nn
from torchvision import transforms, datasets
import torch.optim as optim
from tqdm import tqdmfrom MedMamba import VSSM as medmamba # import model
import warnings
import os,syswarnings.filterwarnings("ignore")
os.environ['CUDA_VISIBLE_DEVICES']="0"# 设置随机因子
def seed_everything(seed=42):os.environ['PYHTONHASHSEED'] = str(seed)torch.manual_seed(seed)torch.cuda.manual_seed(seed)torch.backends.cudnn.deterministic = Truedef main():# 设置随机因子seed_everything()# 一些超参数设定num_classes = 2BATCH_SIZE = 64num_of_workers = min([os.cpu_count(), BATCH_SIZE if BATCH_SIZE > 1 else 0, 8]) # number of workersdevice = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")epochs = 300best_acc = 0.0save_path = './{}.pth'.format('bestmodel')# 数据预处理transform = transforms.Compose([transforms.RandomRotation(10),transforms.GaussianBlur(kernel_size=(5, 5), sigma=(0.1, 3.0)),transforms.ColorJitter(brightness=0.5, contrast=0.5, saturation=0.5),transforms.Resize((224, 224)),transforms.ToTensor(),transforms.Normalize(mean=[0.41593555, 0.22245076, 0.075719066],std=[0.23819199, 0.13202211, 0.05282707])])transform_test = transforms.Compose([transforms.Resize((224, 224)),transforms.ToTensor(),transforms.Normalize(mean=[0.41593555, 0.22245076, 0.075719066],std=[0.23819199, 0.13202211, 0.05282707])])# 加载数据集root_path = '/home/aic/deep_learning_data/retino_data'train_path = os.path.join(root_path, 'train')valid_path = os.path.join(root_path, 'valid')test_path = os.path.join(root_path, 'test')dataset_train = datasets.ImageFolder(train_path, transform=transform)dataset_valid = datasets.ImageFolder(valid_path, transform=transform_test)dataset_test = datasets.ImageFolder(test_path, transform=transform_test)class_labels = {0: 'Diabetic Retinopathy', 1: 'No Diabetic Retinopathy'}val_num = len(dataset_valid)train_loader = torch.utils.data.DataLoader(dataset_train, batch_size=BATCH_SIZE,num_workers=num_of_workers,shuffle=True,drop_last=True)valid_loader = torch.utils.data.DataLoader(dataset_valid,batch_size=BATCH_SIZE,num_workers=num_of_workers,shuffle=False,drop_last=True)test_loader = torch.utils.data.DataLoader(dataset_test,batch_size=BATCH_SIZE,shuffle=False)print('Using {} dataloader workers every process'.format(num_of_workers))# 模型定义net = medmamba(num_classes=num_classes).to(device)loss_function = nn.CrossEntropyLoss()optimizer = optim.Adam(net.parameters(), lr=0.0001)train_steps = len(train_loader)for epoch in range(epochs):# trainnet.train()running_loss = 0.0train_bar = tqdm(train_loader, file=sys.stdout)for step, data in enumerate(train_bar):images, labels = dataoptimizer.zero_grad()outputs = net(images.to(device))loss = loss_function(outputs, labels.to(device))loss.backward()optimizer.step()# print statisticsrunning_loss += loss.item()train_bar.desc = "train epoch[{}/{}] loss:{:.3f}".format(epoch + 1,epochs,loss)# validatenet.eval()acc = 0.0 # accumulate accurate number / epochwith torch.no_grad():val_bar = tqdm(valid_loader, file=sys.stdout)for val_data in val_bar:val_images, val_labels = val_dataoutputs = net(val_images.to(device))predict_y = torch.max(outputs, dim=1)[1]acc += torch.eq(predict_y, val_labels.to(device)).sum().item()val_accurate = acc / val_numprint('[epoch %d] train_loss: %.3f val_accuracy: %.3f' %(epoch + 1, running_loss / train_steps, val_accurate))if val_accurate > best_acc:best_acc = val_accuratetorch.save(net.state_dict(), save_path)print('Finished Training')if __name__ == '__main__':main()
感觉Mamaba系列的通病了吧,显存占用不算高,GPU利用率超高:
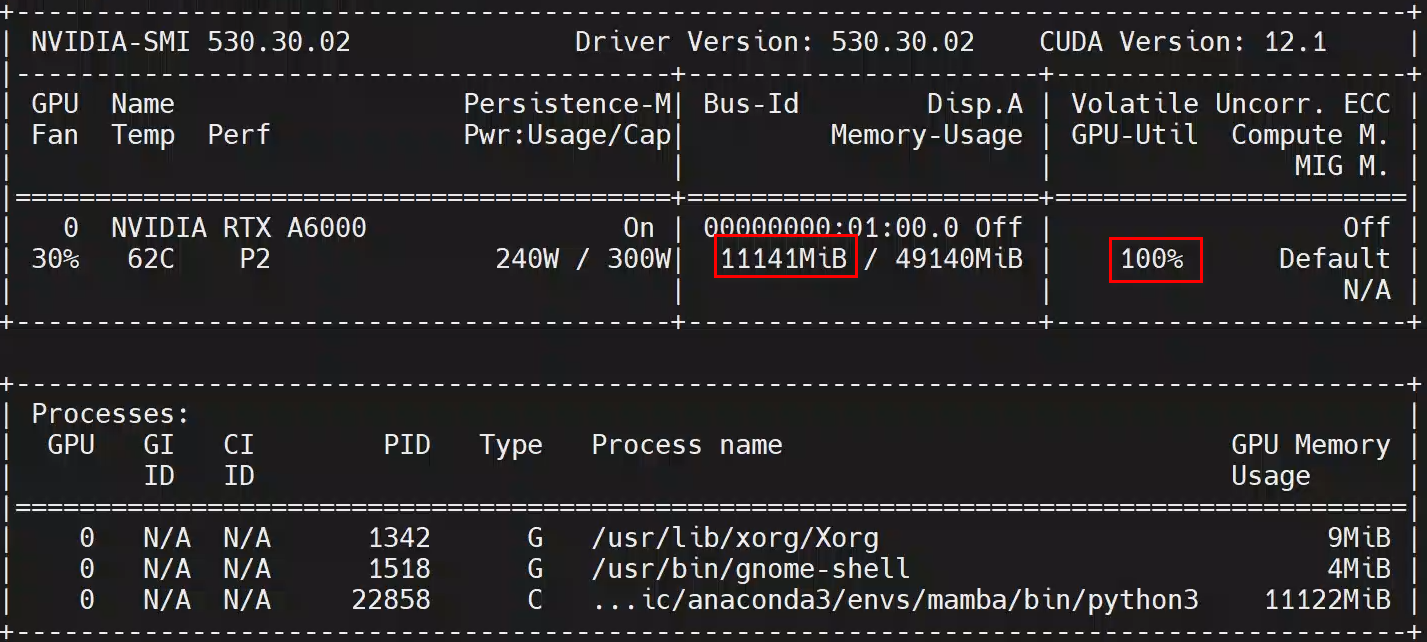
可能是没有用任何的训练调参技巧,经过几个epoch后,验证集准确率很快提升到了92.3%,然后就没有继续上升了。