论文:The emerging graph neural networks for intelligent fault diagnostics and prognostics: A guideline and a benchmark study
链接:The emerging graph neural networks for intelligent fault diagnostics and prognostics: A guideline and a benchmark study - ScienceDirect![]() https://www.sciencedirect.com/science/article/pii/S0888327021009791
https://www.sciencedirect.com/science/article/pii/S0888327021009791
代码:GitHub - HazeDT/PHMGNNBenchmark: this code library is mainly about applying graph neural networks to intelligent diagnostic and prognostic.![]() https://github.com/HazeDT/PHMGNNBenchmark
https://github.com/HazeDT/PHMGNNBenchmark
1. 摘要
近年来,基于深度学习 (DL) 的方法因其强大的特征表示能力而推动了故障预测与健康管理(PHM)领域的发展。PHM 中的数据通常是欧几里得空间中表示的常规数据。尽管如此,越来越多的应用程序考虑了数据的关系和相互依赖性,并以图形的形式表示数据。这种非欧空间中的不规则数据对现有的基于深度学习的方法提出了巨大挑战,使得一些重要的操作(例如卷积)很容易应用于欧几里得空间,但很难对非欧空间中的图数据进行建模。最近,图神经网络(GNN)作为新兴的神经网络,已被用于对图数据进行建模和分析。然而,仍然缺乏利用 GNN 实现智能故障诊断和预测的指南。为了填补这一研究空白,本文提出了一个实用的指南,并建立了一个基于 GNN 的新型智能故障诊断和预测框架来说明所提出的指南是如何工作的。在该框架中,提供了三种图构建方法,并研究了具有四种不同图池化方法的七种图卷积网络 (GCN)。为了提供有助于进一步研究的基准结果,在八个数据集上对这些模型进行了综合评估,其中包括六个故障诊断数据集和两个预测数据集。最后,讨论了与 GCN 性能相关的四个问题,并提供了潜在的研究方向。
2. 智能诊断与预测中为什么要使用图神经网络
对于一个机械系统,其上的监测传感器可以自然的形成一张传感器网络。而在故障诊断与预测中,传统的深度学习模型主要着重于对传感器采集信号的时间特征进行建模,而忽略了样本或传感器之间的空间特征。为了对空间特征进行建模,许多工作尝试使用卷积神经网络(CNN)来捕获空间特征,但是,由于其固有的工作机制,使CNN无法将样本或多传感器之间的潜在关系显式地嵌入到提取的特征中。而与这些方法相比,GNN 能够通过图的边传播节点信息并学习可靠的节点或图表示,其中图的边反映了样本或多传感器之间的关系。卷积运算和图卷积运算两者具体的区别如下所示。

图 1. 卷积运算和图卷积运算的图示。(a) 标准卷积运算的结果是信号 X 的一个子集与可学习的卷积滤波器W的逐点乘法的总和。(b) 图卷积运算的结果则可以是中心节点特征与其相邻节点特征hNe和可学习参数W的乘积的加和。
3. 测试模型和数据集
3.1 测试模型
文中讨论了7种不同的图卷积神经网络,包括:三种基于谱域的图卷积神经网络(ChebyNet,GCN和SGCN)和四种基于空域的图卷积神经网络(GraphSage, GIN, Ho-GCN和GAT)。此外,还测试了四种不同的池化方式,包括:TopkPool、SAGPool、EdgePool,和ASAPool.

图 2. 四种不同的基于空域的图卷积神经网络的特征更新机制。

图 3. 四种不同的图池化方式。
3.2 测试数据集
文章提供的测试基准种包含了6个故障诊断数据集和2个寿命预测数据集。
1)故障诊断数据集包括:XJTUSpurgear、XJTUGearbox、CWRU、PU、MFPT和SEU,其中XJTUSpurgear和XJTUGearbox作为文章中开源的新故障诊断数据集可以前往https://drive.google.com/drive/folders/1ejGZu9oeL1D9nKN07Q7z72O8eFrWQTay?usp=sharing下载。
2)寿命预测数据集包括:CMAPSS 和 PHM2010.
4. 基于GNN的智能故障诊断与预测框架
提出的基于 GNN 的智能故障诊断和预测框架如图 4 所示,它主要基于 PyTorch和 PyTorch Geometrics进行实现。该框架可以分为两部分,即数据预处理和基于GNNs的故障诊断和预测。在数据预处理中,提供了三种图构建方法(即 KNNGraph、RadiusGraph 和 PathGraph)用于从时间序列构建图。将图上的两个任务,即节点分类和图分类或回归,与故障诊断和预测相结合,并设计了相应的节点级(Node-level)和图级(Graph-level)的故障诊断与预测框架。

图 4 基于GNN的智能故障诊断与预测框架
具体来说,为了实现智能故障诊断和预测,首先将采集到的原始数据划分为子样本,然后利用图构建方法将子样本转化为图,如图5所示。之后,可以使用所提出的架构实现故障诊断和预测。对于故障诊断,如果输入数据是单变量数据,建议使用框架中提出的架构1,在这种情况下将图的每个节点视为一个样本。而如果输入数据是多元数据,建议使用架构2,此时将整个图作为样本。但是对于预测,只能采用架构 2 来获得回归的图表示。
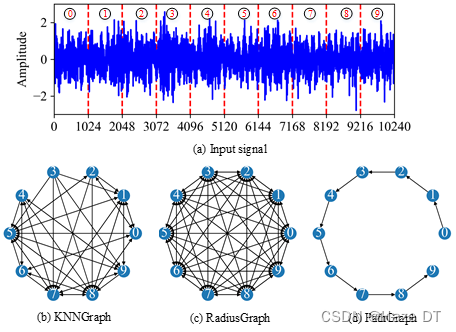
图 5. 使用三种图构建方法的图构建示例。
根据基准测试结果发现,ChebyNet 在这六个故障诊断数据集上获得了最好的整体性能,而 ChebyNet 和 EdegPool 也可以在这两个预测数据集上取得最好的结果。此外,所有模型的性能都可以通过使用频域输入来提高。
5. 未来方向
虽然图神经网络目前已经取得了较大的发展,但未来在故障诊断与预测中仍需要关注一下几点:
1) 研究实现图卷积的新范式;
2) 将先验知识嵌入到构建的图中;
3) 将图卷积推广到现有模型以获得更强的模型;
4) 图神经网络的可解释性。