目录
- 房价预测--线性回归
- 数据处理
- 数据形状变换
- 数据集划分
- 数据归一化处理
- housing.data数据格式
- 模型设计
- 线性回归模型设计
- 训练配置
- 训练过程
- 保存并测试模型
- 保存模型
- 测试模型
房价预测–线性回归
波士顿房价预测数据集是经典的机器学习、深度学习入门的数据集。下面我们用这个数据集完成房价预测任务。
学习目标:
1.了解深度学习框架编写代码的基本套路;
2.了解线性回归任务的基本模式;
#加载飞桨、Numpy和相关类库
import paddle
import paddle.fluid as fluid
import paddle.fluid.dygraph as dygraph
from paddle.fluid.dygraph import Linear
import numpy as np
import os
import random
代码中参数含义如下:
- paddle/fluid:飞桨的主库,目前大部分的实用函数均在paddle.fluid包内。
- dygraph:动态图的类库。
- Linear:神经网络的全连接层函数,即包含所有输入权重相加和激活函数的基本神经元结构。在房价预测任务中,使用只有一层的神经网络(全连接层)来实现线性回归模型。
说明:
飞桨支持两种深度学习建模编写方式,更方便调试的动态图模式和性能更好并便于部署的静态图模式。
- 静态图模式(声明式编程范式,类比C++):先编译后执行的方式。用户需预先定义完整的网络结构,再对网络结构进行编译优化后,才能执行获得计算结果。
- 动态图模式(命令式编程范式,类比Python):解析式的执行方式。用户无需预先定义完整的网络结构,每写一行网络代码,即可同时获得计算结果。
为了学习模型和调试的方便,本教程均使用动态图模式编写模型。在后续的资深教程中,会详细介绍静态图以及将动态图模型转成静态图的方法。仅在部分场景下需要模型转换,并且是相对容易的。
数据处理
数据处理包含五个部分:数据导入、数据形状变换、数据集划分、数据归一化处理和封装load data函数。数据预处理后,才能被模型调用。
数据处理的代码不依赖框架实现,直接使用 python 来完成任务。
数据形状变换
由于读入的原始数据是1维的,所有数据都连在一起。因此需要我们将数据的形状进行变换,形成一个2维的矩阵,每行为一个数据样本(14个值),每个数据样本包含13个X(影响房价的特征)和一个Y(该类型房屋的均价)。
数据集划分
将数据集划分成训练集和测试集,其中训练集用于确定模型的参数,测试集用于评判模型的效果。为什么要对数据集进行拆分,而不能直接应用于模型训练呢?这与学生时代的授课和考试关系比较类似。

上学时总有一些自作聪明的同学,平时不认真学习,考试前临阵抱佛脚,将习题死记硬背下来,但是成绩往往并不好。因为学校期望学生掌握的是知识,而不仅仅是习题本身。另出新的考题,才能鼓励学生努力去掌握习题背后的原理。同样我们期望模型学习的是任务的本质规律,而不是训练数据本身,模型训练未使用的数据,才能更真实的评估模型的效果。
在本案例中,我们将80%的数据用作训练集,20%用作测试集,实现代码如下。通过打印训练集的形状,可以发现共有404个样本,每个样本含有13个特征和1个预测值。
数据归一化处理
对每个特征进行归一化处理,使得每个特征的取值缩放到0~1之间。这样做有两个好处:一是模型训练更高效;二是特征前的权重大小可以代表该变量对预测结果的贡献度(因为每个特征值本身的范围相同)。
def load_data():# 从文件导入数据datafile = './work/housing .data'data = np.fromfile(datafile, sep=' ')# 每条数据包括14项,其中前面13项是影响因素,第14项是相应的房屋价格中位数feature_names = [ 'CRIM', 'ZN', 'INDUS', 'CHAS', 'NOX', 'RM', 'AGE', \'DIS', 'RAD', 'TAX', 'PTRATIO', 'B', 'LSTAT', 'MEDV' ]feature_num = len(feature_names)# 将原始数据进行Reshape,变成[N, 14]这样的形状data = data.reshape([data.shape[0] // feature_num, feature_num])# 将原数据集拆分成训练集和测试集# 这里使用80%的数据做训练,20%的数据做测试# 测试集和训练集必须是没有交集的ratio = 0.8offset = int(data.shape[0] * ratio)training_data = data[:offset]# 计算train数据集的最大值,最小值,平均值maximums, minimums, avgs = training_data.max(axis=0), training_data.min(axis=0), \training_data.sum(axis=0) / training_data.shape[0]# 记录数据的归一化参数,在预测时对数据做归一化global max_valuesglobal min_valuesglobal avg_valuesmax_values = maximumsmin_values = minimumsavg_values = avgs# 对数据进行归一化处理for i in range(feature_num):#print(maximums[i], minimums[i], avgs[i])data[:, i] = (data[:, i] - avgs[i]) / (maximums[i] - minimums[i])# 训练集和测试集的划分比例#ratio = 0.8#offset = int(data.shape[0] * ratio)training_data = data[:offset]test_data = data[offset:]return training_data, test_data
housing.data数据格式

百度网盘下载链接如下:
链接: https://pan.baidu.com/s/1ShQ7FxyatK_akkfGWOKApQ
密码: 3lbj
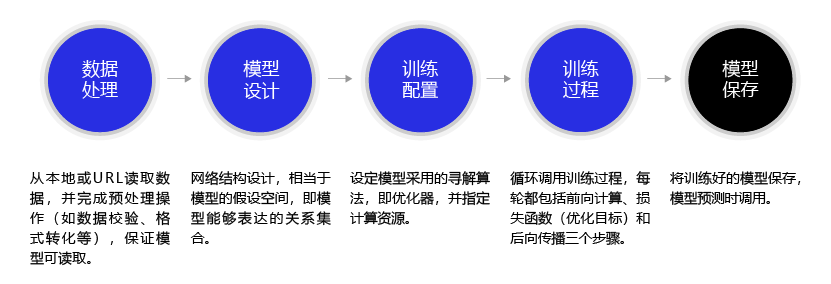
模型设计
模型设计是深度学习模型关键要素之一,也称为网络结构设计,相当于模型的假设空间,即实现模型“前向计算”(从输入到输出)的过程。模型定义的实质是定义线性回归的网络结构,飞桨建议通过创建Python类的方式完成模型网络的定义,即定义init函数和forward函数。forward函数是框架指定实现前向计算逻辑的函数,程序在调用模型实例时会自动执行forward方法。在forward函数中使用的网络层需要在init函数中声明。
实现过程分如下两步:
- 定义init函数:在类的初始化函数中声明每一层网络的实现函数。在房价预测模型中,只需要定义一层全连接层。
- 定义forward函数:构建神经网络结构,实现前向计算过程,并返回预测结果,在本任务中返回的是房价预测结果。
线性回归模型设计
如果将输入特征和输出预测值均以向量表示,输入特征 x x x有13个分量, y y y有1个分量,那么参数权重的形状(shape)是 13 × 1 13\times1 13×1。假设我们以如下任意数字赋值参数做初始化:
w = [ 0.1 , 0.2 , 0.3 , 0.4 , 0.5 , 0.6 , 0.7 , 0.8 , − 0.1 , − 0.2 , − 0.3 , − 0.4 , 0.0 ] w=[0.1, 0.2, 0.3, 0.4, 0.5, 0.6, 0.7, 0.8, -0.1, -0.2, -0.3, -0.4, 0.0] w=[0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,−0.1,−0.2,−0.3,−0.4,0.0]
假设房价和各影响因素之间能够用线性关系来描述:
y = ∑ j = 1 M x j w j + b y = {\sum_{j=1}^Mx_j w_j} + b y=j=1∑Mxjwj+b
模型的求解即是通过数据拟合出每个 w j w_j wj和 b b b。其中, w j w_j wj和 b b b分别表示该线性模型的权重和偏置。一维情况下, w j w_j wj 和 b b b 是直线的斜率和截距。
线性回归模型使用均方误差作为损失函数(Loss),用以衡量预测房价和真实房价的差异,公式如下:
M S E = 1 n ∑ i = 1 n ( Y i ^ − Y i ) 2 MSE = \frac{1}{n} \sum_{i=1}^n(\hat{Y_i} - {Y_i})^{2} MSE=n1i=1∑n(Yi^−Yi)2
class Regressor(fluid.dygraph.Layer):def __init__(self):super(Regressor, self).__init__()# 定义一层全连接层,输出维度是1,激活函数为None,即不使用激活函数self.fc = Linear(input_dim=13, output_dim=1, act=None)# 网络的前向计算函数def forward(self, inputs):x = self.fc(inputs)return x
训练配置
训练配置过程包含四步:
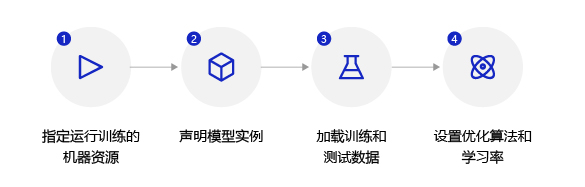
- 以
guard函数指定运行训练的机器资源,表明在with作用域下的程序均执行在本机的CPU资源上。dygraph.guard表示在with作用域下的程序会以飞桨动态图的模式执行(实时执行)。 - 声明定义好的回归模型Regressor实例,并将模型的状态设置为训练。
- 使用load_data函数加载训练数据和测试数据。
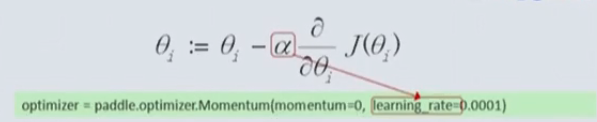
- 设置优化算法和学习率,优化算法采用随机梯度下降SGD,学习率设置为0.01。
训练配置代码如下所示:
# 定义飞桨动态图的工作环境
with fluid.dygraph.guard():# 声明定义好的线性回归模型model = Regressor()# 开启模型训练模式model.train()# 加载数据training_data, test_data = load_data() # 定义优化算法,这里使用随机梯度下降-SGD# 学习率设置为0.01opt = fluid.optimizer.SGD(learning_rate=0.01, parameter_list=model.parameters())
说明:
- 默认本案例运行在读者的笔记本上,因此模型训练的机器资源为CPU。
- 模型实例有两种状态:训练状态
.train()和预测状态.eval()。训练时要执行正向计算和反向传播梯度两个过程,而预测时只需要执行正向计算。为模型指定运行状态,有两点原因:
(1)部分高级的算子(例如Drop out和Batch Normalization,在计算机视觉的章节会详细介绍)在两个状态执行的逻辑不同。
(2)从性能和存储空间的考虑,预测状态时更节省内存,性能更好。
- 在上述代码中可以发现声明模型、定义优化器等操作都在
with创建的 fluid.dygraph.guard()上下文环境中进行,可以理解为with fluid.dygraph.guard()创建了飞桨动态图的工作环境,在该环境下完成模型声明、数据转换及模型训练等操作。
训练过程
训练过程采用二层循环嵌套方式:
-
内层循环: 负责整个数据集的一次遍历,采用分批次方式(batch)。假设数据集样本数量为1000,一个批次有10个样本,则遍历一次数据集的批次数量是1000/10=100,即内层循环需要执行100次。
for iter_id, mini_batch in enumerate(mini_batches): -
外层循环: 定义遍历数据集的次数,通过参数EPOCH_NUM设置。
for epoch_id in range(EPOCH_NUM):
说明:
batch的取值会影响模型训练效果。batch过大,会增大内存消耗和计算时间,且效果并不会明显提升;batch过小,每个batch的样本数据将没有统计意义。由于房价预测模型的训练数据集较小,我们将batch为设置10。
每次内层循环都需要执行如下四个步骤。
- 数据准备:将一个批次的数据转变成np.array和内置格式。
- 前向计算:将一个批次的样本数据灌入网络中,计算输出结果。
- 计算损失函数:以前向计算结果和真实房价作为输入,通过损失函数square_error_cost计算出损失函数值(Loss)。飞桨所有的API接口都有完整的说明和使用案例。
- 反向传播:执行梯度反向传播
backward函数,即从后到前逐层计算每一层的梯度,并根据设置的优化算法更新参数opt.minimize。
因为计算损失时需要把每个样本的损失都考虑到,所以我们需要对单个样本的损失函数进行求和,并除以样本总数 N N N。
L = 1 N ∑ i ( y i − z i ) 2 L= \frac{1}{N}\sum_i{(y_i - z_i)^2} L=N1i∑(yi−zi)2
with dygraph.guard(fluid.CPUPlace()):EPOCH_NUM = 10 # 设置外层循环次数BATCH_SIZE = 10 # 设置batch大小# 定义外层循环for epoch_id in range(EPOCH_NUM):# 在每轮迭代开始之前,将训练数据的顺序随机的打乱np.random.shuffle(training_data)# 将训练数据进行拆分,每个batch包含10条数据mini_batches = [training_data[k:k+BATCH_SIZE] for k in range(0, len(training_data), BATCH_SIZE)]# 定义内层循环for iter_id, mini_batch in enumerate(mini_batches):x = np.array(mini_batch[:, :-1]).astype('float32') # 获得当前批次训练数据y = np.array(mini_batch[:, -1:]).astype('float32') # 获得当前批次训练标签(真实房价)# 将numpy数据转为飞桨动态图variable形式house_features = dygraph.to_variable(x)prices = dygraph.to_variable(y)# 前向计算predicts = model(house_features)# 计算损失loss = fluid.layers.square_error_cost(predicts, label=prices)avg_loss = fluid.layers.mean(loss)if iter_id%20==0:print("epoch: {}, iter: {}, loss is: {}".format(epoch_id, iter_id, avg_loss.numpy()))# 反向传播avg_loss.backward()# 最小化loss,更新参数opt.minimize(avg_loss)# 清除梯度model.clear_gradients()# 保存模型fluid.save_dygraph(model.state_dict(), 'LR_model')
保存并测试模型
保存模型
将模型当前的参数数据model.state_dict()保存到文件中(通过参数指定保存的文件名 LR_model),以备预测或校验的程序调用,代码如下所示。
# 定义飞桨动态图工作环境
with fluid.dygraph.guard():# 保存模型参数,文件名为LR_modelfluid.save_dygraph(model.state_dict(), 'LR_model')print("模型保存成功,模型参数保存在LR_model中")理论而言,直接使用模型实例即可完成预测,而本教程中预测的方式为什么是先保存模型,再加载模型呢?这是因为在实际应用中,训练模型和使用模型往往是不同的场景。模型训练通常使用大量的线下服务器(不对外向企业的客户/用户提供在线服务),而模型预测则通常使用线上提供预测服务的服务器,或者将已经完成的预测模型嵌入手机或其他终端设备中使用。因此本教程的讲解方式更贴合真实场景的使用方法。
飞桨的愿景是用户只需要了解模型的逻辑概念,不需要关心实现细节,就能搭建强大的模型。
测试模型
下面我们选择一条数据样本,测试下模型的预测效果。测试过程和在应用场景中使用模型的过程一致,主要可分成如下三个步骤:
- 配置模型预测的机器资源。本案例默认使用本机,因此无需写代码指定。
- 将训练好的模型参数加载到模型实例中。由两个语句完成,第一句是从文件中读取模型参数;第二句是将参数内容加载到模型。加载完毕后,需要将模型的状态调整为
eval()(校验)。上文中提到,训练状态的模型需要同时支持前向计算和反向传导梯度,模型的实现较为臃肿,而校验和预测状态的模型只需要支持前向计算,模型的实现更加简单,性能更好。 - 将待预测的样本特征输入到模型中,打印输出的预测结果。
通过load_one_example函数实现从数据集中抽一条样本作为测试样本,具体实现代码如下所示。
def load_one_example(data_dir):f = open(data_dir, 'r')datas = f.readlines()# 选择倒数第10条数据用于测试tmp = datas[-10]tmp = tmp.strip().split()one_data = [float(v) for v in tmp]# 对数据进行归一化处理for i in range(len(one_data)-1):one_data[i] = (one_data[i] - avg_values[i]) / (max_values[i] - min_values[i])data = np.reshape(np.array(one_data[:-1]), [1, -1]).astype(np.float32)label = one_data[-1]return data, label
with dygraph.guard():# 参数为保存模型参数的文件地址model_dict, _ = fluid.load_dygraph('LR_model')model.load_dict(model_dict)model.eval()# 参数为数据集的文件地址test_data, label = load_one_example('./work/housing .data')# 将数据转为动态图的variable格式test_data = dygraph.to_variable(test_data)results = model(test_data)# 对结果做反归一化处理results = results * (max_values[-1] - min_values[-1]) + avg_values[-1]print("Inference result is {}, the corresponding label is {}".format(results.numpy(), label))
通过比较“模型预测值”和“真实房价”可见,模型的预测效果与真实房价接近。房价预测仅是一个最简单的模型,使用飞桨编写均可事半功倍。那么对于工业实践中更复杂的模型,使用飞桨节约的成本是不可估量的。同时飞桨针对很多应用场景和机器资源做了性能优化,在功能和性能上远强于自行编写的模型。