torchvision 目标检测微调
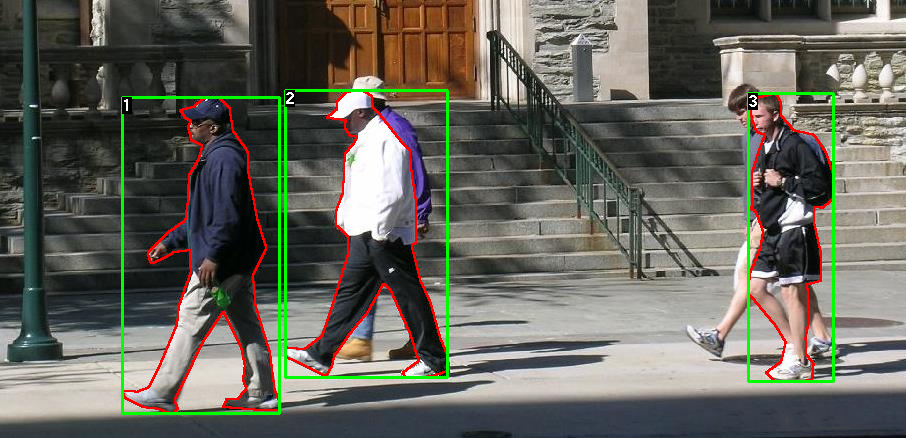
本教程将使用Penn-Fudan Database for Pedestrian Detection and Segmentation 微调 预训练的Mask R-CNN 模型。 它包含 170 张图片,345 个行人实例。
定义数据集
用于训练目标检测、实例分割和人物关键点检测的参考脚本允许轻松支持添加新的自定义数据集。数据集应继承自标准的 torch.utils.data.dataset 类,并实现 __len__ 和 __getitem__ 。
__getitem__ 需要返回:
image: PIL 图像 (H, W)
target: 字典数据,需要包含字段
boxes (FloatTensor[N, 4]): N 个 Bounding box 的位置坐标 [x0, y0, x1, y1], 0~W, 0~H
labels (Int64Tensor[N]): 每个 Bounding box 的类别标签,0 代表背景类。
image_id (Int64Tensor[1]): 图像的标签 id,在数据集中是唯一的。
area (Tensor[N]): Bounding box 的面积,在 COCO 度量里使用,可以分别对不同大小的目标进行度量。
iscrowd (UInt8Tensor[N]): 如果 iscrowd=True 在评估时忽略。
(optionally) masks (UInt8Tensor[N, H, W]): 可选的 分割掩码
(optionally) keypoints (FloatTensor[N, K, 3]): 对于 N 个目标来说,包含 K 个关键点 [x, y, visibility], visibility=0 表示关键点不可见。
如果模型可以返回上述方法,可以在训练、评估都能使用,可以用 pycocotools 里的脚本进行评估。
pip install pycocotools 安装工具。
关于 labels 有个说明,模型默认 0 为背景。如果数据集没有背景类别,不需要在标签里添加 0 。 例如,假设有 cat 和 dog 两类,定义了 1 表示 cat , 2 表示 dog , 如果一个图像有两个类别,类别的 tensor 为 [1, 2] 。
此外,如果希望在训练时使用纵横比分组,那么建议实现 get_height_and_width 方法,该方法将返回图像的高度和宽度,如果未提供此方法,我们将通过 __getitem__ 查询数据集的所有元素,这会将图像加载到内存中,并且比提供自定义方法的速度慢。
为 PennFudan 写自定义数据集
文件夹结构如下:
PennFudanPed/PedMasks/FudanPed00001_mask.pngFudanPed00002_mask.pngFudanPed00003_mask.pngFudanPed00004_mask.png...PNGImages/FudanPed00001.pngFudanPed00002.pngFudanPed00003.pngFudanPed00004.png
这是图像的标注信息,包含了 mask 以及 bounding box 。每个图像都有对应的分割掩码,每个颜色代表不同的实例。

import os
import numpy as np
import torch
from PIL import Imageclass PennFudanDataset(torch.utils.data.Dataset):def __init__(self, root, transforms):self.root = rootself.transforms = transforms## 加载所有图像,sort 保证他们能够对应起来self.images = list(sorted(os.listdir(os.path.join(self.root, 'PNGImages'))))self.masks = list(sorted(os.listdir(os.path.join(self.root, 'PedMasks'))))def __getitem__(self, idx):img_path = os.path.join(self.root, 'PNGImages', self.images[idx])mask_path = os.path.join(self.root, 'PedMasks', self.masks[idx])image = Image.open(img_path).convert('RGB')## mask 图像并没有转换为 RGB,里面存储的是标签,0表示的是背景mask = Image.open(mask_path)# 转换为 numpymask = np.array(mask) # 实例解码成不同的颜色obj_ids = np.unique(mask)# 移除背景obj_ids = obj_ids[1:]masks = mask == obj_ids[:, None, None]# get bounding box coordinates for each masknum_objs = len(obj_ids)boxes = []for i in range(num_objs):pos = np.where(masks[i])xmin = np.min(pos[1])xmax = np.max(pos[1])ymin = np.min(pos[0])ymax = np.max(pos[0])boxes.append([xmin, ymin, xmax, ymax])# 转换为 tensorboxes = torch.as_tensor(boxes, dtype=torch.float32)labels = torch.ones((num_objs,), dtype=torch.int64)masks = torch.as_tensor(masks, dtype=torch.uint8)image_id = torch.tensor([idx])area = (boxes[:, 3] - boxes[:, 1]) * (boxes[:, 2] - boxes[:, 0])iscrowd = torch.zeros((num_objs,), dtype=torch.int64)target = {}target["boxes"] = boxestarget["labels"] = labelstarget["masks"] = maskstarget["image_id"] = image_idtarget["area"] = areatarget["iscrowd"] = iscrowdif self.transforms is not None:image, target = self.transforms(image, target)return image, targetdef __len__(self):return len(self.images)
Lnton羚通专注于音视频算法、算力、云平台的高科技人工智能企业。 公司基于视频分析技术、视频智能传输技术、远程监测技术以及智能语音融合技术等, 拥有多款可支持ONVIF、RTSP、GB/T28181等多协议、多路数的音视频智能分析服务器/云平台。